

51单片机对8位数码管依次显示0-7的设计
控制/MCU
描述
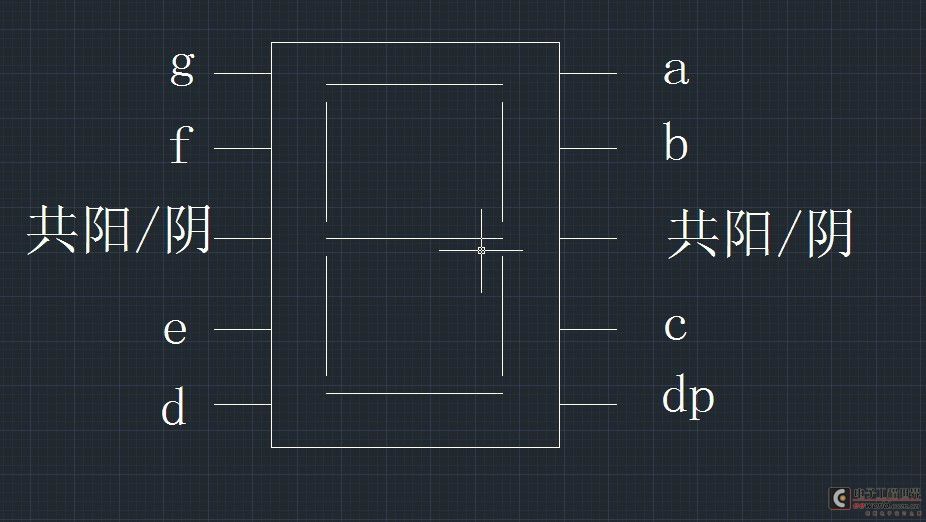
共阳极数组0~9:display[]={0xC0,0xF9,0xA4,0xB0,0x91,0xA2,0x82,0xF8,0x80,0x90}
共阳极数组A~F:display[]={0x88,0x83,0xA6,0xC1,0x86,0x8E}
共阴极数组0~9:display[]={0x3F,0x06,0x5B,0x4F,0x6E,0x6D,0x7D,0x07,0x7F,0x6F}
共阴极数组A~F:display[]={0x77,0x7C,0x59,0x3E,0x79,0x71}
共阴、两组四位一体数码管,位选接74LS138译码器,输入(位选)CBA接P20,P21,P22。段选通过74573后接P1口。
若不使用译码器,可直接将位选段接IO口,赋值改变。
/*******************************************************************************
2 * 实 验 名 : 动态数码管显示
3 * 实验说明 : 8位数码管依次显示0~7
*******************************************************************************/
8 #include
9
10 #define GPIO_DIG P1 //Digitron 数码管
11 sbit LSA= P2^0;
12 sbit LSB= P2^1;
13 sbit LSC= P2^2;
14
15 unsigned char code DIG_CODE[10]={
16 0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; //0~9的显示码
17 void DigDisplay();
18
19 void main(void)
20 {
21 while(1)
22 DigDisplay();
23 }
24
25
26 void DigDisplay()
27 {
28 unsigned char i;
29 unsigned int j;
30 for(i=0;i《8;i++)
31 {
32 switch(i) //位选,选择点亮的数码管,
33 {
34 case(0):
35 LSA=0;LSB=0;LSC=0; break;//显示第0位
36 case(1):
37 LSA=1;LSB=0;LSC=0; break;//显示第1位
38 case(2):
39 LSA=0;LSB=1;LSC=0; break;//显示第2位
40 case(3):
41 LSA=1;LSB=1;LSC=0; break;//显示第3位
42 case(4):
43 LSA=0;LSB=0;LSC=1; break;//显示第4位
44 case(5):
45 LSA=1;LSB=0;LSC=1; break;//显示第5位
46 case(6):
47 LSA=0;LSB=1;LSC=1; break;//显示第6位
48 case(7):
49 LSA=1;LSB=1;LSC=1; break;//显示第7位
50 }
51 GPIO_DIG=DIG_CODE[i];//发送段码
52 j=10000; //扫描间隔时间设定,若减少j,可观察到稳定显示的0~7 (扫描速度太快,人眼识别不了)
53 while(j--);
54 GPIO_DIG=0x00;//消隐
55 }
56 }
1 /*******************************************************************************
2 * 实 验 名 : 数码管秒表显示
3 * 实验说明 : 0~59依次显示
*******************************************************************************/
8 #include
9
10 #define GPIO_DIG P1 //Digitron 数码管
11 #define uchar unsigned char
12 #define uint unsigned int
13 sbit LSA= P2^0;
14 sbit LSB= P2^1;
15 sbit LSC= P2^2;
16
17 uchar shi,ge,num1=0,num=0;
18 uchar code DIG_CODE[10]={
19 0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; //0~9的显示码
20 void Delay5ms();
21 void DigDisplay(uchar shi,uchar ge);
22
23
24 void main()
25 { //200微秒@20MHz
26 TMOD = 0x01; //设置定时器模式
27 TL0 = 0xA8; //设置定时初值
28 TH0 = 0xFD; //设置定时初值
29 EA = 1; // 开总中断
30 TF0 = 0; //清除TF0标志
31 ET0 = 1; // 开定时器0中断
32 TR0 = 1; //定时器0开始计时
33 while(1)
34 {
35 DigDisplay(shi,ge);
36 }
37 }
38
39 void DigDisplay(uchar shi,uchar ge)
40 {
41 GPIO_DIG=DIG_CODE[shi]; //段选
42 LSA=0;LSB=0;LSC=0;
43 Delay5ms();
44 GPIO_DIG=DIG_CODE[ge];
45 LSA=1;LSB=0;LSC=0;
46 Delay5ms();
47 }
48
49 void Timer0Init(void) interrupt 1
50 {
51 TL0 = 0xA8; //重装初
52 TH0 = 0xFD;
53 num1++;
54 if(num1==200) //5次200ms即为1s到
55 {
56 num1=0;
57 num++;
58 if(num==60)
59 num=0;
60 shi=num/10;
61 ge = num%10;
62 }
63 }
64
65
66 void Delay5ms() //@12.000MHz
67 {
68 unsigned char i, j;
69
70 i = 59;
71 j = 90;
72 do
73 {
74 while (--j);
75 } while (--i);
76 }
-
51单片机8位数码管显示学号程序编写思路2024-01-04 11101
-
基于51单片机实现动态数码管显示2023-07-17 17523
-
基于89C51单片机的8位数码管显示其中之一源程序2023-05-16 966
-
51单片机(九)—— 8位数码管-显示一位2021-11-20 2343
-
使用51单片机实现8位数码管时钟的程序免费下载2020-11-13 2038
-
如何使用51单片机实现8位数码管动态显示12位数字程序免费下载2019-06-28 2178
-
8位数码管显示时间2017-11-21 1686
-
8位数码管动态扫描显示2016-06-16 979
-
基于单片机的中断控制程序(中断0计数_4位数码管显示)【C语言】2015-12-29 1534
-
AVR单片机595驱动8位数码管的显示的电路实现2015-10-29 808
全部0条评论

快来发表一下你的评论吧 !
