

机器视觉的闪光灯系统需要哪些特性?
描述
伴随边缘计算、传感器等技术的不断发展,人机交互(HMI)正在取得重大进展。如ADI公司在2019年关键技术展望中提及,在智慧工厂、机器人以及越来越多的协作机器人(人-机器人配合)将会具备快速学习和适应环境的能力,一些能够通过多种模式(如机器视觉、激光雷达、ToF测距等)实时绘制三维环境图的自主机器人和协作机器人将变得越来越重要。
以机器视觉为例,在协作机器人大规模应用之前,现代工业组装生产线就已经运用机器视觉来辅助自动化光学检查,以确保在组装线上快速移动的部件符合定义的规范。未通过光学检查的缺陷部件被打上标记并自动地从组装线移除,从而确保部件之间的一致性。而在这一类组装线上作为视觉传感使用的高速摄像机需要一种照相闪光灯系统,该系统能够始终如一地重现一个固定导通时间光脉冲,可变的关断时间由组装线的速度以及部件的间隔距离来限定。
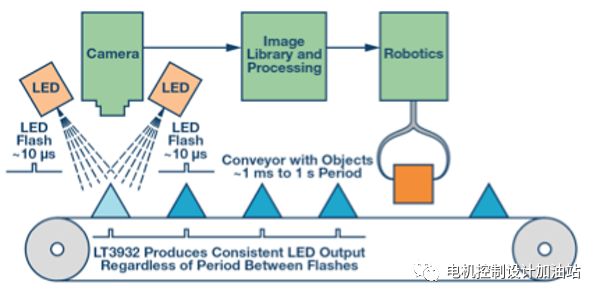
图1:快速移动的传送带通过机器视觉系统进行快速标签和缺陷检测:
机器视觉的闪光灯系统需要哪些特性?
笔者从ADI公司技术专家口中了解到:在这一过程中,红外和激光LED闪光灯常用于近程和运动检测机器视觉。安全系统发出高速、难以察觉的LED闪光灯来检测运动,捕获和存储安全影像。但是,这些机器视觉的相机闪光灯系统都存在的一个挑战,即产生非常高的电流和短时间(微秒)LED相机闪光波形,这些波形可能散开在较长时间内,例如100 ms到1 s以上。
然而,产生间隔较长时间的短时LED闪光方波并非易事。当LED(或LED串)的驱动电流上升到1 A以上,并且LED开启时间缩短到几微秒时,挑战难度进一步加大。许多具有高速PWM能力的LED驱动器可能无法有效处理较长关断时间和短时间的高电流,而又不降低适当处理高速图像所需的方波质量。
应对机器视觉闪光灯挑战,关断时间成重点
为了实现上述功能,据ADI专家介绍,ADI的高速LED驱动器LT3932可为高达2 A的LED串提供机器视觉相机闪光灯,关断时间可以长达1秒、1小时、1天或更长时间,从而完美地解决这一问题。ADI专家表示,LT3932的特殊相机闪光灯功能允许其保持输出电容和控制环路充电状态,哪怕是在长关断时间内。对输出和控制环路电容的状态进行采样后,LT3932继续在长关断期间对这些元件进行涓流充电,以补偿通常都会有的漏电流,而这是其他LED驱动器没有考虑到的。
ADI的LT3932专有闪光技术支持扩展,驱动器可以并联以提供更高的LED闪光电流。所需的闪光形状和完整性保持不变。下图显示了并联两个驱动器从而支持3 A相机闪光灯,甚至高达4 A的设计也是可行的。
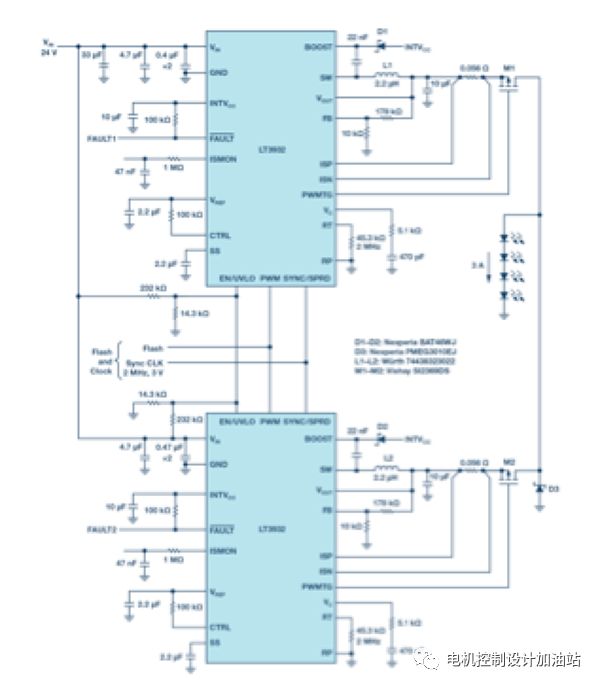
图2:相对于标准PWM调光频率,并联LT3932 1.5A LED驱动器产生具有长关断时间的3A机器视觉LED脉冲:
机器视觉系统的LED闪光灯要求远远高于标准PWM调光驱动器所能达到的要求,即大多数高端LED驱动器设计用于在至少100 Hz的PWM频率下提供PWM调光亮度控制。ADI专家称,若频率较低,哪怕LED波形十分完美,人眼看到的也是令人讨厌的闪烁或频闪。在100 Hz时,理论最大关断时间约为10 ms。在10 ms关断时间内,如果设计正确,LED驱动器会损失极少输出电容电荷,使其在大约相同的状态下启动控制环路,从而结束最后一个PWM导通脉冲。电感电流和下一个LED PWM导通脉冲的快速响应和斜坡上升可以很快且可重复,并且启动时间极短。较长关断时间(频率低于100 Hz时)可能会导致输出电容因漏电而损失电荷,从而使LED重启时无法快速响应。
如何获取更大电流驱动负载?不妨并联一下众所周知,LED驱动器充当电流源,调节通过发光二极管发出的电流,这是其工作原理。电流仅沿单一方向输出,因此可将多个LED驱动器并联起来,其电流汇总后通过负载。ADI专家称,电流源不需要防范电流通过一个转换器反向流动,也无需担心输出不匹配。实际上,电压调节器本身并不擅长均流,如果它们都试图将输出电压调节到某一点,并且其反馈网络存在细微差异,则调节器可能会吸收反向电流。
LED驱动器会保持其输出电流不变,无论其他驱动器是否提供额外电流并汇总在输出负载上。这使得并联LED驱动器非常简单。例如,图2所示使用ADI两颗并联的LED驱动器LT3932构成的闪光灯系统能以3 A高效驱动4个LED,10μs短脉在机器视觉系统所定义的较长期间内冲散开来。在PWM导通时间内,每个LT3932转换器产生总串电流的一半;在PWM关断时间内,转换器关闭并保存其输出状态。关断时间可短可长,对闪光波形的重复性没有影响。观察波形我们可以看到,无论是10 ms PWM关断时间(100 Hz)还是1 s PWM关断时间(1 Hz),LED脉冲都很陡峭且快速,这对于机器视觉系统是非常理想的。
ADI专家指出,在长关断期间,并联相机闪光灯应用几乎与单个转换器一样简单。转换器观察最后一个PWM导通脉冲结束时的共享输出电压,让输出电容充电至该状态并保持。每个转换器将其PWM MOSFET与共享负载断开连接,并向其输出电容供应电流以补偿泄漏的能量,使该电容充电至接近最后电压状态并保持。这些电容在长关断时间内发生的任何泄漏都可以通过少量维持电流来补偿。当下一个PWM导通脉冲开始时,每个转换器的PWM MOSFET导通,输出电容以与最后一个脉冲大致相同的状态启动,无论是经过了10 ms还是一整天。
图3:专家演示通过两个DC2286A LT3932电路轻松并联以创建3 A至4 A机器视觉LED闪光灯应用。
本文小结:
总结而言,机器视觉系统可以使用并联LED驱动器来创建自动图像处理所需的快速、方形、高电流波形。通过并联转换器,ADI 公司LED驱动器LT3932的专有相机闪光灯技术可以扩展到更高的电流。采用并联LT3932转换器,即使关断时间较长,也可以实现3 A和更高的微秒级脉冲。无论LED闪光之间的关断时间有多长,LED相机闪光波形都能保持方形且无抖动。
值得强调的是,事实上并联LED驱动器不限于两个转换器,三个或更多转换器也可以并联在一起,产生具有陡沿的更高电流波形。该系统没有主器件或从器件,因此所有转换器都提供相同量的电流并平均分担负载。建议所有并联LED驱动器转换器共享相同的同步时钟并保持同相。这样可确保所有转换器的输出电容纹波具有大致相同的相位,故而纹波电流不会反向流动或在不同转换器之间流动。
-
LED闪光灯电路图分享2024-01-08 5331
-
用于高功率机器视觉闪光灯的LED驱动器LT3932简介2022-08-09 1982
-
机器视觉的闪光灯系统需要哪些特性?2021-01-25 2152
-
【模拟对话】用于高功率机器视觉闪光灯的 LED 驱动器2019-09-27 2066
-
机器视觉高功率照相闪光灯系统的特性是什么?2019-07-31 1939
-
用于高功率机器视觉闪光灯的LED驱动器2018-10-22 1971
-
闪光灯LED驱动器的设计原理及特性2011-08-31 3532
-
闪光灯闪光指数2009-12-23 1501
-
数码相闪光灯2009-12-18 706
-
用小型闪光灯泡制作闪光灯2009-09-12 2249
-
顺序闪光的交流闪光灯电路2009-01-17 1696
全部0条评论

快来发表一下你的评论吧 !
