

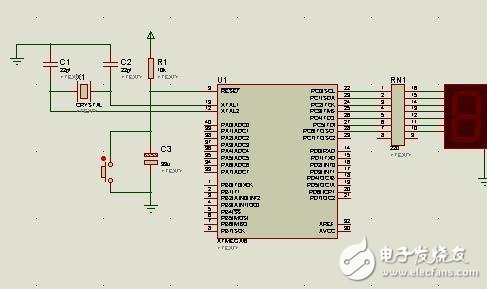
AVR单片机对数码管数据P0口与P2口的控制设计
控制/MCU
描述
//数码管数据P0口,数码管控制P2口
#include
#include
#include
#include
#include
#define code PROGMEM
#define uchar unsigned char
#define uint unsigned int
code const ucharLED_7[16] = {0x28, 0x7E, 0xA2, 0x62, 0x74, 0x61, 0x21, 0x7A, 0x20, 0x60,0xff};//common of +
code const uchar position[8] = {0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe};
uchar TIme[4]; //时间计数
volaTIle uchar disp_buff[8]; //显示缓冲区
volaTIle uchar TIme_count = 0;
volatile uchar point_on = 0;
volatile uchar posit = 0;
volatile uchar time_10ms_ok = 0;
void time_to_dispbuff(void);
void time1_init(void);
void time0_init(void);
void display(void);
int main(void)
{
PORTA = 0xff;
DDRA = 0xff;
PORTC = 0xff;
DDRC = 0xff;
time[0] = 00;//1/10sec
time[1] = 30;//sec
time[2] = 59;//minute
time[3] = 23;//hour
time_to_dispbuff();
time1_init();
sei();
while(1)
{
if(time_10ms_ok)
{
time_10ms_ok = 0;
if(++time[0]》=100)
{
time[0] = 0;
point_on = ~point_on;
if(++time[1]》=60)
{
time[1] = 0;
if(++time[2]》=60)
{
time[2] = 0;
if(++time[3]》=24)
{
time[3] = 0;
}
}
}
}
time_to_dispbuff();
}
}
}
void time0_init(void)
{
TCCR0 = 0x05;
TCNT0 = 0xea;
TIFR |= 0x02;
TIMSK |= 0x02;
}
void time1_init(void)
{
TCCR1A = 0x00;
TCCR1B = 0x01;
TCNT1 = 0xa99a;
//TCNT1H = 0xa9;
//TCNT1L = 0x9a;
TIFR |= 0x80;
TIMSK |= 0x80;
}
SIGNAL(SIG_OVERFLOW1)
{
TCNT1 = 0xa99a;
display();
if(++time_count 》=5)
{
time_10ms_ok = 1;
time_count = 0;
}
}
void display(void)
{
PORTC = 0xff;
PORTA = pgm_read_byte(&led_7[disp_buff[posit]]);
if(point_on && ((posit==2)||(posit==4)||(posit==6)))PORTA &= 0x7f;
PORTC = pgm_read_byte(&position[posit]);
if(++posit》=8)posit = 0;
}
void time_to_dispbuff(void)
{
uchar i,j=0;
for(i=0;i《=3;i++)
{
disp_buff[j++] = time[i]%10;
disp_buff[j++] = time[i]/10;
-
[求助]单片机P0口驱动共阴数码管如何焊接?2010-10-07 1498
-
DIP封装的51单片机P0口驱动数码管时需要加上拉电阻,PQFP封...2014-10-25 5820
-
单片机I/O口的使用2009-12-03 1539
-
p0口为什么接上拉电阻2018-08-22 57625
-
avr单片机的数码管显示时钟设计2018-11-21 2253
-
51单片机P0口的特性及使用方法解析2018-12-14 40486
-
51单片机P0口上拉电阻的取值问题分析2019-02-11 6298
-
51单片机的P0和P1、P2、P3的区别与IO口直接输入输出实例详细说明2019-09-19 27368
-
51单片机P0口的工作原理和分时复用的详细讲解2019-09-03 5530
-
单片机P0口的AD0-7到底是什么意思2019-07-11 3227
-
51单片机的P0口驱动能力到底怎么样详细总结说明2019-10-10 4712
-
AVR单片机对数码管数据P0口与P2口的控制设计资料下载2021-04-11 1004
-
单片机---数码管和独立按键基础知识2021-12-31 1148
-
单片机实验三:外部中断控制数码管循环显示0~92022-01-18 3751
-
单片机原理I/O口结构:P0口和P2口的结构介绍2022-03-11 12185
全部0条评论

快来发表一下你的评论吧 !
