

自动驾驶汽车的关键传感器LIDAR详解
汽车电子
描述
“超能力”LIDAR具备让自动驾驶汽车(或是任何机器人)观察这个世界的几个特殊的“超能力”:
360 °全方位无死角的可视能力——想象一下人眼能够时时刻刻观察到所有的方向
极其准确的深度信息——想象一下你总是可以知道与物体的精确距离(精度± 2 cm )
如果你之前见过自动驾驶汽车,可能你已经接触过LIDAR。正如下图中的Uber 和 Baidu的自动驾驶汽车,它是安装在汽车顶部的不断旋转的笨重盒子。
目前市场上最受欢迎的LIDAR传感器是下图中Homer顶部的高功率Velodyne HDL-64E。
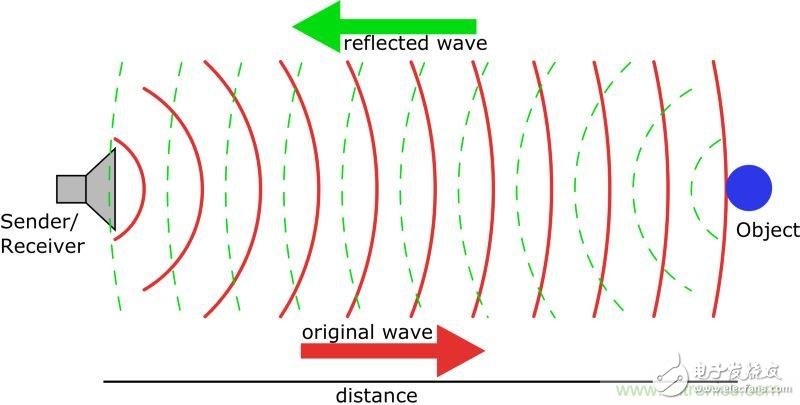
LIDAR的工作原理传感器是如何做到360度无死角以及高精度的深度信息捕获呢?
简单地说:LIDAR传感器不断发射激光传感束,然后根据光束返回至传感器的时间测距。
通过每秒发送数百万光束,LIDAR传感器可以真正地实现3D世界的可视化。可以推断出与周围任何物体的精确测量值(最大约60米,取决于所用的传感器)
Homer的驾驶空间
LIDAR的简史为了进一步理解现代LIDAR背后的技术支持,着眼于具备相同目标的相似技术非常重要。
Sonar
最初的深度感应祖先是蝙蝠(具备5000万年的历史)。蝙蝠(或是海豚,之类……)能够像LIDAR一样使用回声定位,另一个称为声呐(声音导航和测距)。和LIDAR激光测距不同的是,Sonar使用声波进行测距。
经过了5000万年的生物进化,随着潜艇战的到来,第一次世界大战加速了人造声呐传感器的大规模部署。Sonar在水中工作的效果非常突出,因为声波在水中比光和无线电波的传播速度更快(指的是每秒的传播距离)。Sonar传感器在现代汽车上的应用频率很高,主要是以停车传感器的形式。短距离传感器(——5m)提供了低廉的方式来告知后方墙壁与汽车的距离。声呐还未被证明可以在自动驾驶汽车要求的范围内工作(60m+)
在这种情况下,蝙蝠是回声定位信号的发送者和接受者
雷达
雷达(无线电导航与测距),与Sonar非常相像,是在第二次世界大战时发展起来的另一项技术。与使用激光或声波不同的是,它利用无线电波来测距。在Homer上使用Delphi传感器利用大量的雷达,它是一种久经考验的方法,能够精确地检测和跟踪最远距离200米的物体。
从缺点这方面来看,雷达的缺点非常少。它在极端天气下的表现优异并且价位非常实惠。雷达不仅在物体检测方面应用广泛,并且在追踪方面也有很多的应用(即:理解车辆行驶的速度以及方向)。雷达不一定能提供LIDAR的粒度,但是雷达是免费的,LIDAR不是。
激光雷达技术
激光雷达技术诞生于20世纪60年代,就在激光问世不久。在1971年阿波罗15号任务期间,宇航员就用它测量绘制了月球表面,让人们第一次看到激光雷达能做什么。
在激光雷达应用于汽车和自动驾驶使用之前,激光雷达通常应用于考古学。并且激光雷达在绘制地面版图中有着极大的帮助,在考古学和农业中占有着及其重要的地位。
“当激光雷达技术首次应用于Angamuco时,我们从观测到的区域大小,建筑物和结构来看,甚至无法得出这是个城市的结论。团队成员史蒂夫莱斯教授告诉(英国广播公司)BBC。更令人惊讶的是,尽管城市面目全非,但是还是有球队利用它在这里找到了一个名为pok-ta-pok的中美洲比赛球场,在比赛中费希尔还在离球门十米远的地方进过球“这真是太令人惊讶了”莱斯说。-激光雷达帮助考古学能探索到更多不为人知的地方。
激光雷达技术的50个应用同时激光雷达技术在许多不同的领域中正在变得越来越流行。
直到21世纪初,激光雷达技术才首次被用于汽车,并且在2005年,斯坦利(以及后来的Junior)在Grand DARPA挑战赛中应用了才使它流行起来。
在这场比赛中左图的斯坦利使用的是SICK的激光雷达传感器,而右图的Junior则使用的是Velodyne的传感器。
斯坦利是2005年Grand DARPA挑战赛的冠军,除了装备了军用级GPS,陀螺仪,加速度计和一个可见度80米以上的摄像头外,还另外在屋顶安装了5个SICK激光雷达传感器。所有这些都是由6个放置于后备箱的1.6GHz的奔腾lunix系统电脑所驱动的。
这项使用SICK激光雷达技术(在2005年为很大一部分的挑战车辆提供动力)由于每次激光扫描基本上都是由单个平面进行的切割,因此对于每位参赛者必须有序的指挥他们。许多参赛队伍将它们安装在倾斜台上,这样他们就可以顺利的“扫过”一段空间。简单来说:与我们今天所知的现代3D激光雷达技术(多方向的光束)相比,SICK是一个2D激光雷达(单一方向上的一些光束)。
Velodyne长期以来一直是激光雷达的市场领导者,但是他们并不满足于现状。Velodyne于1983年开始从事音频公司的生活,超低音扬声器装备特定的传感器,利用DSP和定制DSP控制算法。以实现低频音效和低音炮音效技术。在斯坦利首次登场的同时,Velodyne同时成为我们今天所知的激光雷达公司。Velodyne的创始人大卫和布鲁斯霍尔首次参加了2004年DARPA比赛,组建了DAD(数字音频驱动器)团队。2005年第二场比赛中,大卫霍尔发明了基于3D激光的实时系统并申请了专利,这为Velodyne当前的激光雷达产品奠定了基础。在2007年第三次DARPA挑战中,大多数团队的感知系统使用的就是这项技术。大卫·霍尔的发明现在在史密森学会中被认为是实现自动驾驶的根本性突破。
2005年时DAD队第一台Velodyne激光雷达扫描仪的直径约为30英寸,重量接近100磅。因此他们团队选择将激光雷达扫描仪商业化而不是继续使用它参加比赛。
Velodyne公司不断改善技术,将传感器的尺寸和重量减轻的同时提高它的性能。Velodyne的HDL-64E 激光雷达传感器是2007年所有顶级DARPA城市挑战赛团队的地形图构建和障碍物检测的主要手段,六个完成这个挑战赛的团队有五个在使用该传感器,其中包括获胜和第二个团队。一些团队完全依靠激光雷达获取用于通过模拟城市环境驾驶自动驾驶车辆的环境的信息。-维基百科
LIDAR(激光雷达技术)在自动驾驶汽车中的作用为什么LIDAR会使用自动驾驶汽车成为可能?简而言之:绘制地图。LIDAR可以生成巨大的3D地图(这是它最早的应用!)你可以用以汽车或机器人的导航。通过使用LIDAR来对周围的环境进行绘测和导航,你可以提前知道一条车道的轮廓、停止标志甚至是前面500米的红绿灯。这种可预测性正是实现自动驾驶汽车这样的技术所需要的,并且是过去5年来取得进步的重要原因。
物体识别
随着LIDAR应用的更加广泛并且拥有更高的分辨物体的能力,在物体识别和追踪中出现了一个新实例。LIDAR绘制的地图不仅可以让您准确了解自己在世界的哪个位置进而帮助您进行导航。还可以识别和跟踪汽车,行人等障碍物,比如说Waymo的橄榄球头盔。
现代LIDAR使你可以识别一个骑自行车的人和一个行走的人,甚至可以测量他们改变方向和行进的速度。
令人惊叹的导航,不可思议的可预测性、高度解析物体的跟踪相结合意味着LIDAR是主导当代自动驾驶汽车的关键,而且很难看出这种主导会生变化。除非…
视觉传感器主导的自动驾驶汽车
那里有很多创业公司并没有使用激光雷达传感器,仅使用视觉传感器(也许是雷达)来解决自动驾驶汽车的问题。特斯拉是其中最有影响力的公司,他们的CEO埃隆马斯克提出这样的想法:如果人类能够只用眼睛,耳朵和大脑来感知和导航这个世界,那为什么不能用在自动驾驶汽车上呢?我确信这种方法将取得惊人的成果,尤其是现在已经有许多优秀的团队正在努力实现这一目标,其中有Comma和AutoX。
特斯拉表示他们已经决定规模化生产。未来特斯拉希望很快能够每年生产50万辆汽车,并且他们已不再需要等待激光雷达的降价。
埃隆马斯克说,谷歌在其自动驾驶汽车中使用的激光雷达,在汽车中没有意义……
几天前,特斯拉CEO埃隆马斯克召开新闻发布会,介绍了自动驾驶功能…
LIDAR的未来业界的进步聚焦于降成本和分辨率、范围的提升。
降低成本
固态LIDAR有望提供1000美元以下的LIDAR单元,相比于当下的80000美元单价的LIDAR极具吸引力。LeddarTech是这个早期市场的领军公司之一。
Velodyne对于固态LIDAR看法如下:
固态且固定传感器是出于更小的尺寸和尽可能低的成本的可嵌入的传感器而考虑的。这也就意味着视域也就更小。Velodyne支持固定的和旋转的传感器。固定的传感器为了能够嵌入所以需要小型化。从成本的角度考虑,两者都包含镜头,激光和检测装置。最低成本得系统实际上是通过旋转视域来复用镜头、激光和检测装置,而不是使用额外单独包含镜头、激光和检测装置的传感器。复用不仅更加经济实惠而且更加实用,因为这样能够减小因为实时融合不同视角数据而带来的误差,这在车辆实时运动时相当关键。
精度与范围提升
LIDAR应用场景的猛增吸引了一大票才华横溢的创始人和团队投入其中。更高的分辨率与更远的探测范围(例如200米)将提升物体探测和跟踪的性能,并且是像Lumina这样的初创公司的传感器产品的关键区别之一。
-
FPGA在自动驾驶领域有哪些应用?2024-07-29 8169
-
LiDAR如何为自动驾驶汽车提供关键距离传感2023-06-28 1553
-
用于ADAS系统和自动驾驶车辆中雷达的毫米波传感器2022-11-09 1056
-
一文简述自动驾驶汽车的关键传感器LIDAR2020-12-25 914
-
请问摄像头、雷达和LIDAR哪个更适合自动驾驶汽车?2020-11-23 5451
-
联网安全接受度成自动驾驶的关键2020-08-26 3061
-
自动驾驶成功的关键是什么?2020-07-29 2124
-
传感器融合是通向自动驾驶时代的关键一步2020-05-20 2477
-
自动驾驶汽车中传感器的分析2020-05-14 3465
-
智能感知方案怎么帮助实现安全的自动驾驶?2019-07-31 3160
-
LIDAR与RADAR在自动驾驶汽车中的比较2018-10-30 6516
-
即插即用的自动驾驶LiDAR感知算法盒子 RS-Box2017-12-15 5972
-
速腾聚创首次发布LiDAR算法 六大模块助力自动驾驶2017-10-13 2693
-
自动驾驶的到来2017-06-08 7301
全部0条评论

快来发表一下你的评论吧 !
