

如何实现无传感器初始位置检测
电子说
描述
随着真空吸尘器、洗碗机和冰箱等电机驱动设备和电动工具对节能和系统成本的要求日益提高,传统内置位置传感器电机正逐渐被无位置传感器无刷直流电机(BLDC)所取代。之所以会呈现这一趋势,源于使用无传感器控制直流无刷电机时,能够实现更小的尺寸、更高的外形设计灵活性、更低的成本、以及更佳的耐热性。
但当无传感器直流无刷电机处于静止状态时,通常的控制方法是无法利用感应电压实现转子位置检测的。如果该瓶颈得以突破,那些需要平滑高速启动、大扭矩和在启动阶段要求节能的应用,诸如电动工具、机床、运输设备、机器人、风机、泵类等,就能够在启动阶段不需要拉动过程,实现平滑和快速启动,并同时获得大扭矩和较高的电流效率。
为此,瑞萨电子在RL78/G14微控制器基础之上,通过添加增强的电机控制功能,包括片上可编程增益放大器(PGA)/双通道高速比较器(CMP)/电机控制辅助定时器(Timer RX)、丰富的模拟功能和红外(IrDA)通信功能,推出了RL78/G1F微控制器。

图1 RL78/G1F微控制器产品概念
RL78/G1F微控制器可以使用跟无传感器120度传导控制同样的输入输出电路,包括脉宽调制输出(PWM)电机控制输出电路、电流检测输入电路以及相电压输入电路来控制BLDC电机,从而无需再采用传感器或编码器。当电机开始启动时, 由于静止状态下加到一相的电流是可以被区分的,使得平滑和大扭矩的启动成为可能,同时不会发生意外的反转。这意味着,在电机速度为零时是可以检测到转子位置并反射到启动控制上的。此外,它们还可以在没有CPU干预的情况下执行高速过流检测和PWM强行输出切断,因此可以通过少量部件实现高度灵活的电机控制。
如何实现无传感器初始位置检测
利用两种组合检测处理步骤可以有效的检测转子初始位置(分辨率30°)
“
步骤1:利用比较器CMP1、定时器RX和相电压输入电路实现不超过180°的位置检测。优势在于输入电流小,处理时间短。
”
转子的位置变化会导致电机各相端子之间呈现出不同的电感。当电压施加在一个相端子上时,另一个相端子上的电压会有不同的上升状态,这被用来检测转子位置。因为在360度的电角度里两个周期的变化相同,所以这个方法可以在180度的电角度范围内识别位置。
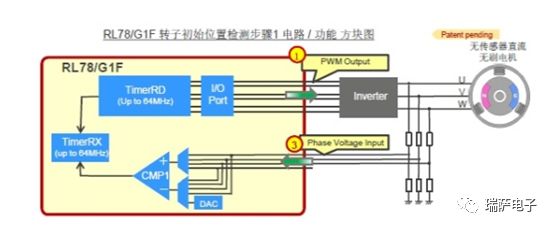
图2 RL78/G1F转子初始位置检测步骤1电路/功能方框图
具体做法是首先在U相上施加电源电压,并测量V相电压(VUV)达到门槛参考电压(VREF1)时经过的时间。再将VUV及VREF1相电压检测输入传送至比较器(CMP1)进行匹配检测,并利用Timer RX的计数器值决定当VUV与VREF1相符的时间。Timer RX开始计数,与Timer RD的PWM输出同步,并与CMP1同步捕获计数值。CMP1最多可使用四个切换外部输入进行匹配比较。由于上述操作使用其中三个输入,故可利用时间量测值达到可重复的结果。
在转子的永久磁铁磁场影响下,各相端子间电感L和定时器RX的计数值会根据转子位置以相同的趋势变化。通过端子之间的定时器RX计数值的大小关系,可以检测出转子位置,分辨率为30°。但是,考虑到这种关系会在360°范围内重复2个周期,因此转子所处的那一个180°范围会由极性判断处理确定。
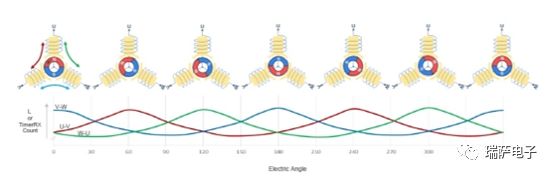
图3 各相端子间电感和定时器的计数值会根据转子位置变化
深度探讨一下步骤1的原理,将有助于我们加深对该应用的理解。
当逆变器电路中所有MOSFET的状态为OFF时,使用定时器RD的脉冲输出,只打开其中一个高端MOSFET,结果电压被施加到电机的一个端子上。于是,虽然电机另一端的电压上升,但由于通向端子的电路主要来自MOSFET寄生电容,所以电压上升具有时间常数。也就是说,电容器是由流过电机线圈的电流充电的,并且电压根据状态而升高。用于测量其端电压的部分电压被输入到RL78/G1F的比较器CMP1的“+”侧,由内部DAC产生的参考电压VREF1被设置在“-”侧以通过CMP1,从电压施加开始到该CMP1匹配的时间由定时器RX测量。
根据电机线圈的电感L开始流经该线圈的电流受到限制,并且输入到RL78/G1F的CMP1的电压上升受到影响。例如,当L大时,电压上升变慢,定时器RX测量值增加;当L较小时,电压迅速上升,定时器RX测量值减小。
该测量是在三组电机端子之间的线路上进行的,并且基于定时器RX值的比较结果,转子位置被确定为一个电旋转中的一对相反的60°或30°区域。
定时器RX可以使计数开始与控制MOSFET的定时器RD同步,并且可以在CMP1匹配的定时自动捕获计数值。另外,由于CMP1可以通过切换至四个外部输入来检测同一单元的一致性,所以可以在电机的三组端子之间以良好的重复性执行该测量。与定时器RD一样,定时器RX可以在CPU的两倍速度下执行最大操作,因此可以以高分辨率执行测量,并且可以检测到微小的时间差。
“
步骤2:利用可编程增益放大器PGA、ADC 和电流检测输入电路进行极性识别。相比步骤1,输入电流较大,处理时间也较长。
”
步骤2采用的方法是电机永久磁铁产生的磁通量与电流通过线圈产生的磁通量会导致线圈铁芯材料磁饱和,从而使电流更容易流动,因此能识别永久磁铁的磁极方向。由于此程序以电机电流作为微控制器的输入电压,故需要分流电阻。
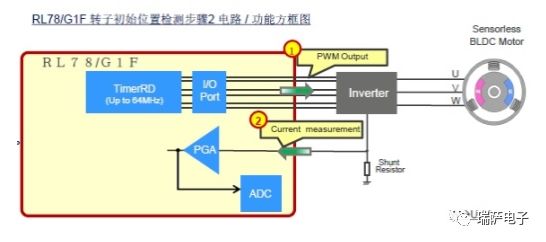
图4 RL78/G1F转子初始位置检测步骤2电路/功能方框图
依据处理步骤1的结果,可识别磁铁指向方向的相位。此步骤中,在绕组+ve(一相)及-ve(两相)之间施加特定电流,并持续固定的时间(tCONST)。利用可编程增益放大器放大该点(电流检测输入)的并联电压,并以A/D转换器量测当电流从W流向U及V时的信号。接着,让电流以反向流动相同的时间(tCONST),并以同样的并联电压量测当电流从U及V流向W时的信号,再利用这两个量测值间的大小关系决定永久磁铁的磁通量方向。
线圈电流产生的磁通量和永久磁铁的磁通量对线圈的芯材有影响。在下图中,铁心内部的磁通量被I+方向的电流强化,I-方向的电流则减弱铁心内部的磁通量。随着电流开始流动,电流随着线圈电感的影响而逐渐增大,电流引起的磁通密度也相应地增加。当磁芯材料内的磁通密度增加达到发生磁饱和时,线圈的电感减小并且电流变得容易流动。当电流的方向在增加磁通时,电流的行为开始受磁饱和影响的电流值较低,在这种情况下,电流更早容易流动。即在“I+”的情况下电流比“I-”更早容易流动。这样,电流容易流动的时刻在“I+”和“I-”之间是不同的,并且在稍微超过该时刻的瞬间,“I+”的电流值大于“I-”。然后,通过ADC测量并比较,可以确定永磁体的极性。
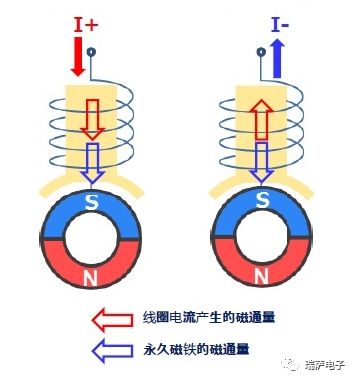
图5 磁通量的显示
我们没有比较某个时间段之后的电流值,而是通过使用比较器CMP0和计时器比较直到电流达到发生磁饱和时的特定电流水平时间,再根据被检测到的“I+”和“I-”差值判断极性。
尽管仅通过对电动机的三相执行该过程就能够以60°的分辨率检测转子位置,但是这一过程比“检测处理1”需要更长的时间和电流。通过“检测处理1”之后,RL78/G1F能够仅以一个相位进行磁极方向的处理,从而高效检测转子初始的位置。
演示套件
在瑞萨电子提供的RL78/G1F无传感器电机控制演示套件中,电机控制电路由“RL78/G1F CPU板卡”和“用于RX23T的24V电机控制评估系统”逆变器板组成,初始位置检测和转子控制演示由“用于RX23T的24V电机控制评估系统”实现。
图6 RL78/G1F无传感器电机控制演示套件
在应用于初始位置检测的处理1中(位置检测不超过180°),考虑到必须要在短时间内捕捉到电压变化,因此电压测量电路中不能有用于测量的带有电容的滤波电容器。可是,由于转动控制还需要滤波器,所以在RL78/G1F CPU板卡上增加了一个用于增加端口控制的滤波电容器电路。
而在旋转控制演示中,针对直流无刷电机的无传感器120度传导控制,RL78/G1F支持两种过零检测的方法:使用A/D转换器用于低转速控制的非比较器法,以及使用CMP1用于高转速控制的比较器法。在演示中,电机开始启动时会首先执行非比较器法,当转速达到1500 rpm时平滑切换到比较器法,如果转速降低到1450 rpm时,则会从比较器法切换到非比较器法。
-
无位置传感器的直流无刷电机控制系统设计与实现2018-11-07 2048
-
L78/G1F 无传感器BLDC电机 初始转子位置检测2019-05-21 4122
-
怎样检测电机转子的初始位置2021-09-16 2047
-
无位置传感器的SRD调速系统的初始位置检测2009-06-27 652
-
无位置传感器无刷直流电机控制策略综述2009-07-13 455
-
BLDCM无位置传感器换相检测和开环启动的软件实现2009-07-14 466
-
无传感器BLDCM位置检测的一种单片机软件实现方法2009-08-10 452
-
无位置传感器无刷直流电动机控制方法及其DSP实现2011-03-01 1279
-
无刷直流电机无位置传感器控制系统研究_杨杰2016-04-26 578
-
曲轴位置传感器和凸轮轴位置传感器的工作原理与检测2017-08-23 4593
-
基于C-Dump变换器的无刷直流电机的无传感器位置检测方法的DSP软件实现2017-10-19 784
-
永磁同步电机初始位置检测方法2018-01-29 2328
-
基于电机无位置传感器控制实现换相控制电路的设计2020-03-02 2428
-
节气门位置传感器结构_节气门位置传感器检测2020-03-09 5273
-
使用霍尔效应传感器针对篡改和移动终点位置检测实现限制检测2024-09-10 377
全部0条评论

快来发表一下你的评论吧 !
