

一种基于两相旋转坐标系的高压变频器无速度传感器矢量控制设计
工业控制
描述
1 引言
级联高压变频器广泛应用于大功率风机、泵类的起动与变频调速,且节能效果明显。然而为了满足高性能的调速需要,具有优良控制性能的矢量控制级联高压变频调速系统的理论和应用技术研究逐渐成为广泛关注的热点。要实现高压变频器的矢量控制,必须对速度进行闭环控制,但速度传感器的安装、维护、非线性和低速性能等方面的问题,影响了高压异步电动机调速性能的简单性、廉价性和可靠性。因此,无速度传感器矢量控制已成为交流传动领域重要的研究课题。
至于异步电动机转速辨识,国内外学者提出了许多转速辨识方法。由于应用MRAS方法原理简单,易于实现,在无速度传感器矢量控制系统中得到了广泛应用。
传统MRAS算法分别以两相静止坐标系下转子磁链电压模型和两相旋转坐标系下转子磁链电流模型为参考模型和可调模型。通过调节可调模型中所需辨识的转速值,使两模型所计算的磁链差值趋于零,从而辨识电机转速。但此速度辨识方法易受采样电压电流直流偏移的影响,实际应用中稳定性较差。基于此,以改进型转子磁链电压模型为参考模型,以两相旋转坐标系下转子磁链电流模型为可调模型,通过对两模型计算的转子磁链角度差进行PI调节来辨识异步电动机的转速。最后基于此转速辨识算法,分别在Matlab仿真软件和以TMS320F28335型DSP芯片为核心的级联高压变频器异步电机实验平台上完成了仿真和实验。通过仿真和实验表明,该MRAS转速辨识方案应用在级联高压变频器异步电机无速度传感器矢量控制系统中结构简单,易于实现,而且能准确地估计电机磁链及转速。
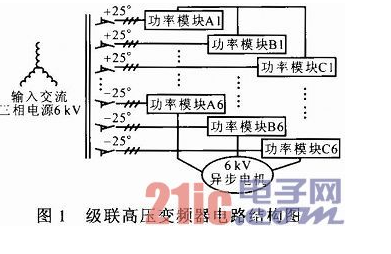
2 级联高压变频器电路结构
级联高压变频器主电路如图1所示。该电路由于结构和控制方法都易于向更多电平数扩展,故已成为目前最受关注的多电平电路形式。其主要特点有:①电机侧逆变单元采用H桥级联方式,使用低压器件实现高压输出。由于各功率单元结构相同,易于模块化设计和封装;②直流侧采用独立电源供电,无需箝位器件,也不存在电压均衡问题;③采用级联方式,分别对每一单元进行PWM控制,保障了装置的可靠运行,结合现代交流电机的高性能控制算法,可实现在多种场合下的应用。采用低压变频器级联构成高压变频器的功率器件可采用晶闸管或可关断器件,选择余地较大。特别是随着GTO,IGBT的成熟应用和IGCT等新型全控型器件的出现,以及以DSP为核心的高性能数字控制技术的迅猛发展,级联高压变频器得到了广泛应用。
3 基于旋转坐标系下MRAS速度估算
3.1 改进型转子磁链电压模型
异步电机在两相α,β坐标系下的转子磁链电压方程为:
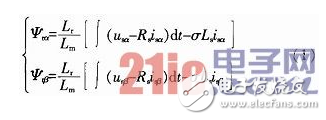
式中:ψrα,ψrβ为转子磁链在α,β轴上的磁链分量;Rs为定子电阻;Lm为互感;Ls为定子每相绕组的等效自感;Lr为转子每相绕组的等效自感;usα,usβ,isα,isβ为定子电压、电流在α,β轴上的电压、电流分量;σ为漏磁系数。
由式(1)可知,转子磁链电压模型中不包含转子电阻Rr,因此受转子参数的影响较小。但电压模型中包含积分环节,磁链计算受采样电压电流直流偏移影响较大。将纯积分环节替换为一阶低通滤波环节,可有效消除积分初始值引起的输出误差,但对于输入直流偏置,却无能为力。在此将参考磁链矢量经低通滤波后用以补偿低通滤波环节引入的相位滞后,并且将滤波器的时间常数取为转子励磁时间常数,还可削弱Rs的变化引起的偏差。模型如图2所示。
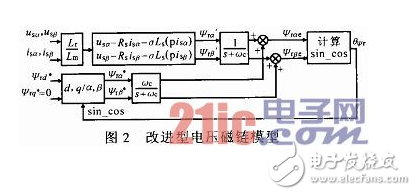
图2中,截止频率ωc取为转子励磁时间常数Tr的倒数。

3.2 转子磁链电流模型
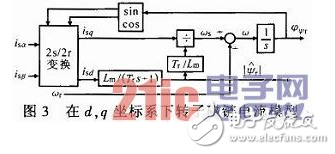
基于两相旋转坐标系下转子磁链电流模型为:
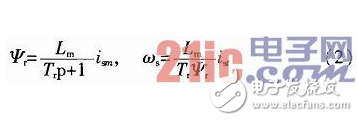
式中:ωs为转子角速度;ωs为转差角频率;ism,ist为定子电流m,t轴的分量;p为微分算子。
转子磁链旋转角速度:ω=ωr+ωs,转子磁链位置 。基于d,q坐标系下的转子磁链电流模型如图3所示。
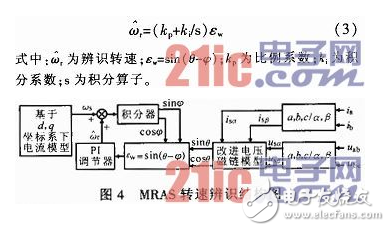
3.3 转速辨识
图4为MRAS转速辨识结构图。转子磁链电压模型和电流模型比较的是同一状态变量,即转子磁链角度。认为电压磁链模型估计的转子磁链角度真实而又准确。如果电流模型计算的转子磁链角度与电压模型确定的相同,那么转速辨识准确。图4所示的转速估算方法就是对电压模型与电流模型的转子磁链角度差进行PI控制,从而辨识出电机转速。转子角速度辨识公式为:
4 仿真分析
为证实理论与分析,利用Matlab/Simulink搭建了级联逆变器异步电机无速度传感器矢量控制仿真模型。该系统中异步电机模型的主要参数:Rs=87 mΩ,Rr=228 mΩ,Lσs=Lσr=0.8 mH,Lm=34.7 mH,np=2,J=1.662 kg·m2。级联的各单元母线电压Udc=180 V,每相三级功率模块串联。
图5为给定转速分别为100 rad·s-1,120 rad·s-1时电机空载启动到转速稳定后的实际转速与辨识转速仿真波形。
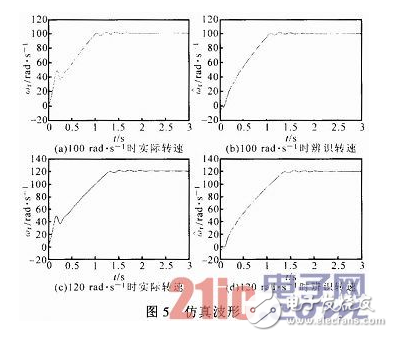
由仿真结果可见,将所研究的改进型MRAS转速辨识方案应用在级联逆变器异步电机无速度传感器矢量控制系统中,能准确地辨识出电机的转速,并且具有较高的辨识精度。
5 实验结果
为了验证所研究的MRAS转速辨识方案,在6 kV级联高压变频器异步电机无速度传感器矢量控制实验平台上进行了实验,实验系统硬件结构图如图6所示。级联的功率单元数为6级,各单元母线电压为810 V。实验用异步电机型号为Y-500-3-4,参数如下:1 250 kW,6 kV,星形接法,1 488 r·min-1,50 Hz,给定磁通8 Wb,Rs=225 mΩ,Rr=749 mΩ,Lσs=Lσr=7.1 mH,Lm=371.1 mH。
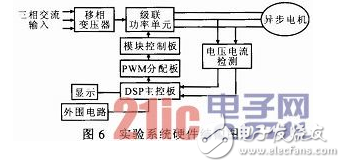
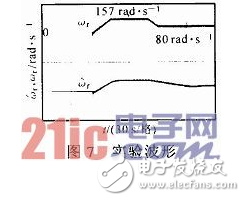
图7为给定转速先为157 rad·s-1,待电机转速稳定后变为80 rad·s-1,电机空载启动到转速稳定后的转速辨识波形(波形由主控D/A通道口输出至录波仪,500 Hz滤波)。由实验波形可知,动态时转速辨识准确。
6 结论
研究了一种基于两相旋转坐标系的改进型MRAS转速辨识方案,应用在级联高压变频器异步电机无速度传感器矢量控制中,省去了速度传感器的安装、维护以及一些工业场所不易安装等问题,并且较传统的基于两相静止坐标系下的MRAS转速辨识方法有了很大改进。仿真和实验结果表明,该改进型MRAS转速辨识方法应用在级联高压变频器异步电机无速度传感器矢量控制系统中,能较好地估计电机的磁链及转速,是一种结构简单,易于实现,可靠性高的转速辨识方案。
-
变频器矢量控制的优点2024-02-02 11493
-
变频器的两种无速度传感器矢量控制模式有什么区别?2024-02-22 15188
-
MRAS无速度传感器矢量控制系统2016-01-04 7885
-
异步电机的无速度传感矢量控制设计2016-01-21 4774
-
变频器控制电机的原理和方式2016-01-29 2789
-
面向高效电机控制的无传感器矢量控制技术继续发展2018-10-10 2497
-
电机矢量控制的重要分析方法2018-10-11 1371
-
【原创文章】电机矢量控制中坐标变换的详细推导2021-08-16 4213
-
永磁同步电机的矢量控制策略2021-08-27 1847
-
电机矢量控制问题的研究2023-03-06 1031
-
变频器控制电机最常用的五种方式分享2023-03-10 1198
-
一种高性能感应电机无速度传感器矢量控制策略_常乾坤2017-01-08 994
-
二相混合式步进电机闭环矢量控制simulink仿真2023-03-24 673
-
变频器矢量控制的原理和特点2023-07-04 6434
-
电机矢量控制中坐标变换的详细推导(可下载)2025-04-03 776
全部0条评论

快来发表一下你的评论吧 !
