

传感器融合与传感器集成的基本区别
描述
传感器融合不仅仅是各个部分的总和。这是硬件和软件集成的一项全面工作。本文重点介绍了传感器技术发展方面的一些最新进展,以及如何将硬件和软件捆绑在一起以便更好地工作。
首先,应该注意的是,术语“传感器融合”和“传感器集成”通常可以互换使用,但实际上有所不同,如以下两个定义和图1所示。¹
传感器融合:感觉数据或来自感官数据的数据的组合,使得得到的信息在某种意义上比单独使用这些信号源时更好。
多传感器集成:传感器数据的协同使用,用于系统完成任务。这与传感器融合的不同之处在于传感器融合包括将感觉信息实际组合成一种代表性格式。
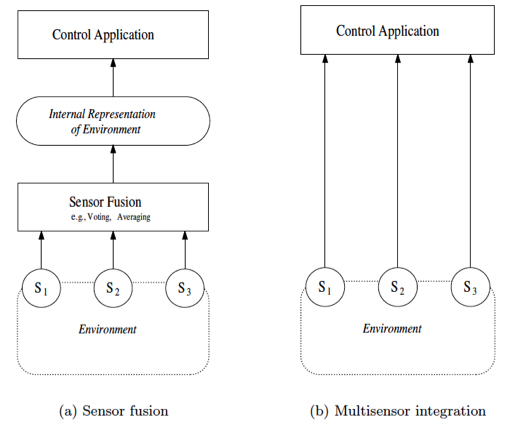
图1:传感器融合和多感官集成的框图。
传感器融合的使用将继续识别下一代智能系统。当系统能够根据捕获数据的多个传感器的输入并使用捕获的信息创建增强的智能系统时,系统能够做出智能决策时发生传感器融合。该集成数据提供了实现使用单个传感器或一系列单个传感器无法实现的目标的手段。
与在过去使用的音量和非集成传感器不存在的情况下收集的数据相比,数据结合起来可以提供更准确,完整和精确的信息。
如同以前的情况一样,完成手头任务并不总是在船上的各个传感器。今天,更有可能是由几个感觉设备提供的协同信息,这些设备一起完成任务。使用多个传感器可以实现多个视点,更大的特殊和时间覆盖范围,减少模糊度,并且比单个传感器提供更高的精度。
多感官集成和融合的应用包括:
遥感
设备监控
生物医学系统
运输系统
然而,即使使用传感器融合,仍然存在挑战。数据收集过程中的潜在设备错误,噪音和缺陷以及有意义数据的提取有时仍然存在问题。其他挑战包括对环境条件的任何改变作出反应的能力。未使用或丢弃的信息量很高。确定将要什么和不需要的是留给经验丰富的设计工程师的练习。一个主要挑战是正确权衡传感器融合所需的成本和增强的性能权衡。当每个传感器可以推断或推断出来,并且针对特定应用集成了许多传感器时,结果肯定是增强的数据,速度和冗余。
毫无疑问,传感器融合会产生大量的冗余效益,因为来自传感器的信息会重叠。今天,用于处理有时属于部分性或不确定性的数据的技术正在取得实质性进展。同样重要的是在以网络为中心的环境中解决带宽挑战。
最近的研究重点领域包括局部或分布式算法,其中传感器节点与那些靠近的传感器进行通信。当节点发生故障和网络发生变化时,这些算法特别有用。然而,这些算法的缺点是它们的性能在更全面的意义上并不是那么出色。另一个挑战是基于其固有约束,利用微传感器跟踪移动目标的能力或缺乏能力。诀窍是让它们与一些但不是所有传感器通信,以防止能量供应消耗和网络过载。
从游戏到平板电脑
Kionix继续开发嵌入式算法和先进的软件,如传感器融合,通过运动的力量为终端应用提供附加价值。该公司采用专有的深硅等离子体刻蚀工艺(DRIE),在MEMS结构中提供卓越的性能。该公司的“XAC”传感元件可提供高稳定性,抗冲击和温度性能,并最大限度地减少回流工作。消费产品“拆解”显示Kionix加速度计的产品范围从Xbox Kinect到三星Galaxy平板电脑到摩托罗拉Droid手机以及Barnes和Noble Nook。 Kionix产品还用于汽车,健康和健身行业。
该公司的KXTF9(图2)是三轴±2,±4或±8-g硅微机械加速度计,具有集成定向,分接/双击和活动检测算法。使用等离子体微机械加工工艺制造感测元件。加速度感测基于来自感测元件的加速度引起的运动的差分电容,其使用共模消除来减少由过程变化,温度和环境压力引起的潜在误差。
通过使用玻璃料将第二硅盖晶片粘合到器件上,将感测元件密封在晶片级。与感测元件封装在一起的独立ASIC器件可提供信号调理和智能用户可编程应用算法。
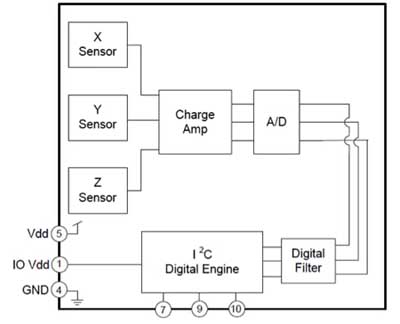
图2:Kionix的KXTF9框图。
加速度计采用3 x 3 x 0.9 mm LGA塑料封装,采用1.8至3.6 VDC电源供电。 I²C接口用于与芯片通信,以配置和检查方向,方向分接检测和活动监控算法的更新。
9-和10-DoF
结合3D加速度计,3D陀螺仪和3D磁力计的典型传感器融合解决方案称为9-DoF(9自由度)或9-SFA(9-sensor融合)轴)解决方案。仔细研究移动设备中使用的传感器类型,很容易看出3D加速度计,3D陀螺仪和3D磁力计正在成为标准功能。例如,可以通过使用方向余弦矩阵算法(DCM)和磁力计,陀螺仪和加速度计来实现对刚体(包括飞机,RC玩具,运动手表,智能电话等)的方向建模。 DCM算法计算刚体相对于地球自转的方向。
校准的传感器读数被馈送到DCM算法,该算法提供相对于地球磁场和重力方向的方向的完整测量,由欧拉(滚动,偏航和俯仰)角度表示。在智能手机等应用中,德州仪器(TI)MSP430F5xx等低功耗MCU可通过I²C协议处理与运动传感器的所有通信。
展望未来没有理由,如果我们包含一个额外的传感量,传感器融合应用无法扩展到10-DoF(或10-ASF)解决方案。
例如,ADI公司的ADIS16480 iSensor器件是一个完整的惯性系统,包括三轴陀螺仪,三轴加速度计和三轴磁力计,以及用于动态定向传感的压力传感器和扩展卡尔曼滤波器(EKF) 。 ADIS16480中的每个惯性传感器都将iMEMS技术与信号调理相结合,优化了动态性能。
工厂校准表征每个传感器的灵敏度,偏置,对齐和线性加速度(陀螺仪偏差)。因此,每个传感器都有自己的动态补偿公式,可提供准确的传感器测量。
很明显,传感器融合需要大量的MCU功率。因此,意法半导体(ST)宣布推出微型智能传感器的细节,该传感器将三轴加速度计与嵌入式微控制器结合在一起,采用紧凑的3 x 3 x 1 mm LGA封装,可实现先进的自定义运动识别功能。
意法半导体将微控制器作为运行传感器融合算法的传感器集线器和高精度三轴数字加速度计组合到一个称为iNEMO-A的单个封装中(以区别于公司当前的iNEMO加速度计)/陀螺仪系列)。该器件降低了对主机控制器和应用处理器的需求,并降低了便携式设备的功耗。这两种优势为支持运动的消费电子产品的设计提供了更大的自由度和灵活性。将高分辨率线性运动传感和传感器集线器集成在一个封装中也有望提高系统的稳健性,据说非常适合电路板布局优化。
-
传感器融合为 IoT 带来了智能传感器,所有行业都将获益2017-03-31 5002
-
获得传感器融合设计的捷径2017-04-07 4033
-
多传感器信息融合技术解析2018-11-07 2322
-
什么是传感器融合?2018-12-10 2743
-
传感器和换能器与AI和雾计算的融合2020-05-19 3025
-
传感器集成电路手册2015-11-05 1073
-
专业设备带来同步的物联网传感器融合2017-05-10 822
-
光纤传感器与光电传感器的区别2019-10-07 18881
-
集成温度传感器的分类_集成温度传感器的典型应用2020-02-29 13552
-
光纤传感器与光电传感器的原理、区别2021-01-05 2803
-
NPN传感器和PNP传感器的区别是什么2022-04-07 43847
-
惯性传感器如何用于传感器融合2022-04-14 1370
-
lidar传感器和激光测距传感器的区别2024-08-29 1580
-
线性传感器和非线性传感器的区别2024-10-21 2593
-
CMOS与传统传感器的成本比较2024-11-14 2154
全部0条评论

快来发表一下你的评论吧 !
