

应用于磁场定向控制电机设计的固件堆栈
描述
永磁同步电机(PMSM)在要求苛刻的电机控制应用中,在效率,响应性和生命周期成本方面具有显着优势。与传统的刷式电机不同,PMSM是电子换向电机(ECM),需要高集成度微控制器,能够执行复杂的磁场定向控制(FOC)算法,并提供实现最大扭矩所需的精确电机控制信号。
通过利用合适的电机控制软件库,工程师可以使用包括飞思卡尔半导体,Microchip技术,恩智浦半导体,意法半导体和德州仪器等领先MCU供应商的专用MCU版本,更轻松地利用FOC PMSM的优势。 》在PMSM中,在多个定子绕组中连续产生的磁场使永磁转子旋转。通过在每个定子绕组产生的磁场和转子中的永磁体之间保持90°相位,电子换向控制逻辑可以在电动机中实现最大扭矩。 FOC,也称为矢量控制,通过在低速下提供高扭矩并快速响应动态变化的负载(例如洗衣机中的负载),提供了一种保持定子和转子之间最佳相位关系的方法。
FOC方法
FOC通过正弦波连续换向PMSM,以提供高扭矩,扭矩波动小。因此,FOC驱动的PMSM运行时机械振荡减少,优于梯形甚至正弦波驱动的无刷直流(BLDC)电机,从而使设备更安静。此外,由于使用永久磁铁,FOC驱动的PMSM非常高效,随着能源成本持续攀升,它们越来越具有吸引力 - 根据美国能源部的数据,厨房和洗衣设备约占家庭用电量的三分之一消费。同时,用于确定转子位置的无传感器方法的可用性进一步降低了部件和生命周期成本。这为PMSM应用在更苛刻的压缩机和泵设计中打开了大门,例如家用,商用和汽车应用,其中传感器不易使用。
FOC实施需要大量的处理需求,需要结合芯片特定的固件架构。电机控制专用软件库,相应的强大处理能力和适当的集成外设功能(见图1)。通常,所需的片上外设功能包括多通道脉冲宽度调制信号输出,具有死区时间以避免电机控制功率级中的直通电流,高速,高分辨率模数转换器(ADC)具有精确触发功能,可在最小的MCU负载下精确测量三相电流,并可在发生机械故障时快速关闭电机故障处理。
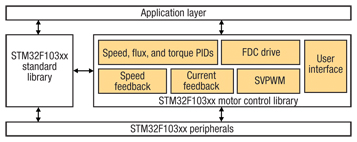
图1:在此代表中用于面向磁场的控制架构的固件栈,片上外设补充了由器件MCU执行的软件程序。
单个MCU产品通过专为更广泛的应用要求和更高性能而设计的专用功能增强了这些基本电机控制功能。例如,飞思卡尔的Cortex-M4 K10 Kinetis MCU提供专用的信号处理功能,如桶形移位器以及并行化功能,如单周期,单指令/多数据(SIMD)和单周期乘法器累加器(MAC) )。 Microchip的dsPIC33F 16位电机控制系列通过其片上40-MIPS数字信号控制器内核实现了所需的性能。恩智浦LPC17xx和LPC32x0分别将专用电机控制PWM与ARM 32位Cortex-M3和16/32位ARM9内核相结合。在每种情况下,MCU供应商都将专用的片上硬件与专用软件库相结合,以满足电机控制要求,例如基于FOC的设计。
FOC算法
FOC算法通过采用三相电机提供PMSM优势通过一系列变换发出信号,这些变换旨在将定子测量的三相时变电机电流转换为更简单的两相,时不变,以转子为中心的参考,可以更容易地进行操作(参见图2) 。结果
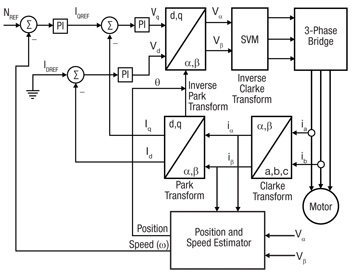
图2:磁场定向控制算法使用一系列信号变换来实现永磁同步电机的电子换向。
在FOC算法的初始输入阶段,MCU使用Clarke变换将三相(IA,IB,IC)电流矢量投影到两相(Iα,Iβ)矢量空间,该矢量空间仍以定子为参考。然后,MCU应用Park变换将定子参考的Iα,Iβ矢量以角度Φ旋转到新的双轴坐标系,其中单独的磁通(Id)和扭矩(Iq)分量与旋转器对齐。由于这个新的坐标系相对于转子保持固定,因此它在参考平面上是时不变的。
将定子磁场矢量与转子坐标系对齐所需的旋转角Φ当然取决于转子位置,传统上通过连接在电机轴上的传感器测量。如上所述,额外的传感器增加了BOM成本并降低了电机系统的寿命,激发了人们对无传感器方法的兴趣增加,这种方法通过利用其与反电动势的已知关系来计算转子位置。然而,与梯形电机不同,FOC设计中的反电动势必须使用虚拟电机模型进行估算,因为所有相都参与换向。因此,无传感器FOC设计会产生额外的处理负载,并要求MCU能够快速返回通过表查找,浮点算法或整数方法(如使用桶形移位器的CORDIC算法)计算出的三角函数的结果。
通过移动三个 - 相位,时变矢量空间到两轴时不变矢量空间,FOC算法允许工程师应用直流电机中使用的传统比例 - 积分 - 微分(PID)控制器来计算新的目标电压Vd和Vq。实际上,电机速度变化的慢响应时间意味着在这些控制器中通常不需要D项。注意,在转子中使用永磁体意味着没有滑动,因为转子产生的转子磁通以与转子磁场相同的速度旋转。因此,图2中所示的参考通量IDREF为零;通过校准设置转矩参考值Iqref以满足所需的性能目标。
MCU通过逆向停车变换传递PI控制器的输出,将转子参考的Vd,Vq值转换为定子参考值。然后,MCU通过反向Clarke变换传递这些结果,以产生所需的三相电压矢量,然后将其转换为脉冲宽度调制(PWM)信号,并传送到直接驱动PMSM的三相功率级。 br》电机控制MCU供应商通过广泛的软件库简化了基于FOC的设计的固件开发。例如,STMicroelectronics将其STM32F103xx系列MCU与用C语言编写的完整PMSM FOC库配对。同样,TI的TMS320C2代码库包括用于Park和Clarke变换的优化C库,能够在短至125个周期内完成Park变换。 》这一系列的变换和控制功能带来了大量的处理负荷,这在无传感器设计中进一步恶化。无传感器FOC逻辑需要包括特殊的初始化和启动程序,以解决静止电机中缺少可观察的电流测量问题(参见图3)。 FOC启动程序通常应用预设的正弦波模式,使电机运行到基于MCU的控制系统切换到无动态无传感器测量所需的足够速度。
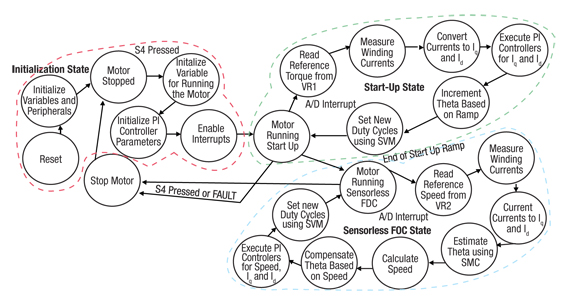
图3:点击启动或复位基于无传感器FOC PMSM的白色物品应用程序上的按钮将电机控制系统置于专用状态,以便将电机正确旋转到足够的速度,以便安全地转换到无传感器状态。
-
磁场定向控制如何优化BLDC电机性能2025-02-13 2217
-
永磁同步电机磁场定向控制转速环PI调节器参数整定2023-03-15 891
-
无刷电机的定向磁场控制与调试方法合集2021-12-06 810
-
磁场定向控制2021-09-15 1501
-
PMSM的磁场定向控制2021-09-06 2066
-
用于永磁同步电机(PMSM)的磁场定向控制(FOC)的设计实践2021-05-19 1533
-
基于DSP的永磁同步电机磁场定向控制器2021-05-12 1399
-
电机:永磁同步电机的磁场定向控制介绍2018-08-21 7551
-
如何实现永磁电机的磁场定向控制2018-06-13 5755
-
3相电机定向磁场控制TI例程报告pdf2018-02-26 811
-
用磁场定向控制提高电机性能2017-07-21 1309
-
采用8位微控制器实现无传感器磁场定向控制2014-05-13 2487
-
PMSM电机的无传感器磁场定向控制源码2011-10-08 1395
全部0条评论

快来发表一下你的评论吧 !
