

无人机的现场无线充电解决方案
描述
亚马逊的Prime Air无人机引起轰动,甚至没有服务。最近,该公司发布了一项在街道路灯柱上安装扩展坞的建议(图1),让他们深入了解其开发团队正在应对的后勤挑战。作为转移负载的地方,这些站点可以为交付计划提供灵活性,并且可能更重要的是,车辆在继续到最终目的地之前重新激活,等待下一个任务或返回基地的充电点。灯柱也方便地连接到电源。

图1:亚马逊已经确定高灯柱是Prime Air无人机的安全场所
自动驾驶汽车的精确对接
为了充电,自动驾驶汽车必须与对接站上提供的充电电极准确连接。亚马逊的专利申请暗示了它可能正在考虑的安排类型(图2)。
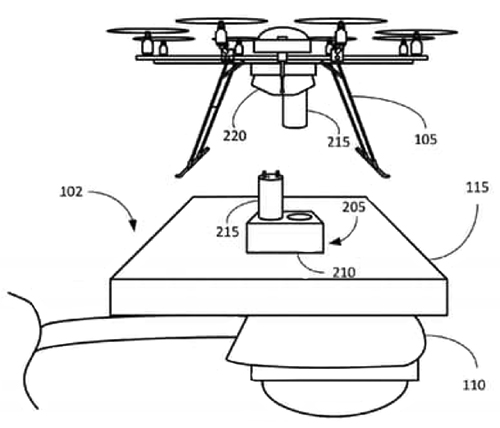
图2:专利申请中的草图表明了无人机可以连接到充电点。
要在对接之前定位车辆,可以选择多种方案。现有的机器人对接系统提供了一些需要考虑的例子。
机器人真空吸尘器,如Roomba,已经上市一段时间了,并通过在清洁过程中监控电池状况自动处理电池充电确定何时返回基站进行充电。基站发射红外信标,Roomba锁定此信号,在信号返回时将信标保持在其视野的中心。
开源ardumower机器人割草机项目采用略有不同的技术。当电池电压低于指示需要充电的水平时,车辆将跟随嵌入地面的周边线路返回其充电站。通过准确地跟踪导线,割草机到达对接站的入口处于合适的位置,以便被引导到码头内部与车辆表面上的充电垫接触的电极。
视觉对准是另一个已在各种项目中展示的选项。制造商社区是一个机器人实验的蜂巢,包括这个在线视频,显示如何使用前置摄像头定位充电站并确保正确对齐。本演示中使用Raspberry Pi和Arduino计算机的机器人会多次停止调整对齐,并且每次都可以将其位置校正几厘米。当车辆是悬停在坞站上方的空中无人机时,微调车辆位置可能会带来更复杂的挑战。阵风可能会增加进一步的复杂性。
无线充电是一种替代方案,目前由Skysense销售的无人机着陆垫。无线充电已经可用于移动电话和电动车辆。如果发射器和接收器相隔最多几厘米,则可以进行充电。通过将接收装置引导到最佳位置或使用允许电力接收器自由定位的若干方法之一,可以实现更快的能量传递的更紧密定位。这些包括在充电板中构建多个线圈以仅在接收器附近产生磁场,或者将发射器线圈机械驱动到靠近接收器的位置。
中国黑龙江省哈尔滨工业大学的一个团队利用线性霍尔传感器结合视觉预对准和随后的高精度对准,解决了自动对准可重构机器人系统模块的挑战。这个名为UBot的机器人可以根据需要重新安排模块来重新配置自己,以执行各种任务,并且还可以在需要时通过更换有缺陷的模块进行自我修复。传感器模块包含CCD视觉传感器和四个线性霍尔传感器,其位置对应于有源对接模块中的磁体位置。模块能够向前和向侧面移动,并且可以旋转。 CCD传感器用于目标采集并指导预对准阶段。来自线性霍尔传感器的信号然后用于控制精确定位,然后使用钩机构完成对接过程。
对哈尔滨团队的研究结果进行仔细检查,可以深入了解视觉或磁性所面临的挑战对准。通过从CCD图像中提取识别的特征,计算角度和线性偏移,并进行线性调整直到它们分别在3度和4毫米内,实现视觉对准。然后,活动模块移近,直到捕获的图像占据视野的80%。然后视觉对准终止,并开始使用线性霍尔传感器进行精确对准。 X,Y和角度校正是根据四个霍尔传感器的输出电压计算出来的,与模块配合面上的坐标有关,可以在两个线性轴和2度角位移中精确定位模块的精度大于1 mm。/p>
用于机器视觉应用的各种图像传感器或相机模块可能能够支持机器人应用中的视觉对准。安森美半导体NOIV1SN1300A是一款单色CMOS传感器,集成了可编程增益放大器和10位模数转换器,并提供4个LVDS串行输出。还提供具有并行CMOS输出的替代变体。像素阵列为1280 x 1024,最多可以编程8个特定感兴趣区域,如果需要可以提供高帧率。
与数字霍尔传感器不同,哈尔滨项目中使用的线性类型允许以高分辨率计算位移,从而允许重复的测量校正循环,最终导致精确对接。 Cherry LIN-11HAW等线性传感器设计用于工业驱动和控制,以及汽车换档位置检测器,测量范围高达45 mm,双冗余输出可提高可靠性。
设计出对准确度的要求?
利用现有的自动驾驶车辆对接和充电知识,可以考虑采用多种技术使无人机相对于对接的充电点定位自己站。采用轮式车辆的典型方法是将感应系统安装在机器人上,利用机器人自身的智能和推进力来调整相对于固定码头的位置。然而,定位系统会增加机器人的重量,这在无人机应用中可能是不可接受的。对于亚马逊来说,额外的重量可以转化为减少承载能力和交付范围。
无对准无线充电可提供最小化无人机上额外电子设备需求的解决方案。如果欧姆充电触点是优选的,例如使用防水连接器,则具有内置机构以固定和重新定位无人机的更复杂的对接站可提供可行的替代方案。这可以像挂钩和绞车一样简单,只需要无人机在标准位置提供“把手”和充电连接器。这可能有助于降低每架无人机的物料清单成本,并在必要时自由改变无人机设计;权衡是一个更复杂的扩展坞,可能需要定期维护。
结论
任何将自动驾驶汽车对接以进行电池充电的方法都需要准确定位。可以考虑许多光学和磁性位置检测技术,尽管在悬停期间将无人机对准在毫米精度内可能证明是困难的并且可能由于诸如风速快速变化的天气条件而进一步复杂化。无线充电或创造性机械工程可以提供一种设计无人机本身的主动定位需求的方法。
-
ROHM 无线充电解决方案2015-03-03 10386
-
无人机系统发展趋势与解决方案最新集锦2015-04-24 3410
-
无人机开发方案要领与电路图集锦2015-05-07 10543
-
植保无人机供电系统解决方案2016-04-23 4996
-
无人机侦测和反制系统2017-04-05 8671
-
Ameya360 无人机视觉、高级传感与处理解决方案2018-04-23 3976
-
无人机续航如何提升至两小时以上,目前的解决方案是无人机充电宝!2018-07-14 7548
-
AMEYA360设计方案丨通用无人机解决方案2018-10-25 1641
-
爱码芯无人机无线充电解决方案2019-01-08 5338
-
多轴无人机BLDC驱动解决方案2020-07-02 3426
-
航模/无人机遥控的解决方案2020-07-03 3512
-
反制无人机枪解决方案2020-07-15 1806
-
投资者投资无人机、机器人无线充电2022-07-27 2645
-
通过无线充电让无人机在空中停留更长时间2022-08-05 3656
-
工业无人机充电连接解决方案2025-02-13 1266
全部0条评论

快来发表一下你的评论吧 !
