

多个传感器的输入结合会产生怎样的效果
描述
传感器融合是从各种传感器收集信息的感官数据的结合。例如,在军用监视卫星的情况下,它可能是来自雷达,热/红外探测器和强大数码相机的输入的组合。在消费电子设备中,传感器可以包括加速度计,罗盘和陀螺仪。在任何一种情况下,来自所有传感器的数据都是“融合”的,并且采用智能信号处理来获取数据,解释结果,并提供比使用的更准确,完整和更可靠的图片。任何这些传感器源都是单独的。融合还可以导致从新的角度看待事物,例如通过在略微不同的视点处组合来自两个相机的二维图像来计算和显示三维深度。
传感器技术新闻今天谈到微型运动传感器,增强现实和三维运动的更大整合。应用程序设计人员要求准确的3-D运动数据,以便他们能够引入一系列基于物理交互的应用程序。来自诸如压力传感器,相机,GPS等集成传感器的数据将被合并以满足这些需求。当我们观察三维和方向感知的未来时,不仅游戏将受益于进一步的进步,还有机器交互,映射和导航。通过3-D环境中的3-D体验和设备的物理定位原型,稳定性,噪声,抖动,清洁数据与复杂数据以及底层传感器的特定优势和劣势等工程挑战可以变得清晰。
让我们看一个例子来看看如何使用正确的传感器共同解决设计挑战。在“构建Windows 8”博客的帖子中,微软Windows部门总裁Steven Sinofsky讨论了他的公司为运行Windows 8的未来平板电脑模拟和原型化3D动作的经验。该公司的目标是确保当用户移动设备时看着屏幕,虚拟环境似乎保持不动。
Microsoft最初尝试通过包含3-D加速度计和3-D磁力计提供典型的6轴运动传感。 “立刻,”Sinofsky写道,“我们遇到了一个问题:来自加速计传感器的数据中的‘噪音’导致3-D环境的抖动,即使设备保持静止。通过捕获加速度计数据并绘制图表,我们能够清楚地看到这种噪音。“
”没有噪音,图表上的线条是直的,没有垂直偏差。消除这种噪声的传统方法是对原始数据流应用低通滤波器。当我们在原型中实现这种缓解时,由此产生的运动是平滑且稳定的(无抖动),但是低通滤波器引入了另一个问题:应用程序失去响应性并且在响应运动时感觉迟钝。我们需要一种方法来补偿这种抖动,而不会降低响应速度。“从这些实验中,微软发现这种传感器组合”无法提供我们想要的流畅和响应体验。加速计传感器未提供干净的数据,不能单独用于确定设备方向。磁力计的更新速度很慢,并且容易受到电磁干扰(想到一个罗盘针偶尔粘在一个位置)。“为了解决这个问题,微软最终以三维陀螺仪的形式增加了第三个传感器。用于检测转速。进一步的实验表明,使用所有三个传感器(公司称之为9轴传感器融合系统)可以解决这个问题。
Sinofsky说:“事实证明,加速度计,磁力计和陀螺仪可以补充彼此的弱点,有效填补数据和数据响应的空白。使用这些传感器的组合可以创建比传感器单独提供的更好,响应更快,更流畅的体验。“图1显示了两种类型的输出:传递输出,其中传感器数据是直接传递给应用程序和传感器融合输出,其中传感器数据被合成为更强大的数据类型。
图1:9轴传感器融合系统。
传感器融合的“神奇之处”是在数学上将来自所有传感器的数据组合在一起,以产生更复杂的输出,包括倾斜补偿,偏航,俯仰,滚动和设备定向,以产生对自然的快速,流畅和响应性反应运动。随着9轴解决方案让位于10轴传感器,传感器,可编程微控制器和无线链路都将组合在一个封装中。
汽车应用
越来越重要的传感器融合应用是汽车。根据Frost& Sullivan的Praveen Chandrasekar,“可靠性和更高的系统性能是推动传感器融合的主要因素。传感器融合有望在驾驶阶段获得最大优先权,驾驶员需要安全和舒适功能的帮助,以确保乘坐舒适性,稳定性和安全性。“到目前为止,他看到了高速公路驾驶,夜间驾驶和驾驶的最大优势。在不利条件下。
在通用汽车公司最近宣布,从今年秋季开始,通用汽车公司将在某些2013款车型上提供先进的主动安全和驾驶辅助系统。这个驾驶员辅助包是第一个使用传感器融合来警告驾驶员道路危险的GM系统,并通过使用雷达,摄像头和超声波传感器来帮助他们避免碰撞,以提供后部自动制动,陆地离场警告等安全功能,和盲区警报。
通用汽车还在考虑将传感器融合作为半自动和全自动车辆开发的重要组成部分,旨在保持车道位置并适应交通环境。通用汽车预计自动驾驶技术将在本十年末实现半自动驾驶和全自动驾驶。
爱普生Toyocom公司的超小型陀螺仪传感器XV-8000CB(图2)是汽车导航系统传感器的一个很好的例子。
图2:Epson Toyocom的超小型汽车导航系统传感器。
这款5 V可操作陀螺仪传感器具有极小的封装尺寸SMD(5 x 3.2 x 1.3 mm)和使用振动晶体的高稳定性。
汽车传感器数据融合应用还包括行人检测和预碰撞警告。通过使用低成本热电堆红外传感器检测行人检测,该传感器可检测8至14μm波段的红外辐射。由于这些传感器不能检测物体的实际位置,因此传感器阵列可以完成工作。
在预碰撞情况下,使用雷达和激光扫描仪传感器融合。在使用环境传感系统来确定碰撞的必然性的情况下发生预碰撞情况。具有这样的系统的优点在于,当系统准确地预测撞击时间和位置时,它为驾驶员花费时间作出反应。利用激光扫描仪和多个雷达传感器提供的数据进行传感器融合,系统可以进行威胁评估和预碰撞确定。
汽车传感器不一定涉及内部和外部安全。以飞思卡尔的MMA955xLRM(图3)智能运动传感平台为例。其应用包括车队监控,跟踪包括航位推算,系统自动唤醒,检测,冲击记录和防盗功能。
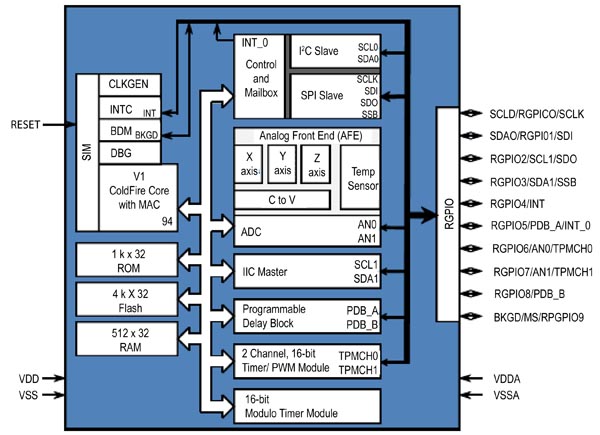
图3:MMA955xL的框图。
MMA955xL 3轴加速度计是飞思卡尔Xtrinsic系列智能传感器平台的成员。该器件集成了专用的加速度计MEMS传感器,信号调理,数据转换和32位可编程微控制器。它创建了一个智能,高精度的运动传感平台,能够管理多个传感器输入,并为诸如手势识别,计步器功能和eCompass倾斜补偿和校准等复杂应用做出系统级决策。
使用其主I2C模块,MMA955xL可以管理辅助传感器,如压力传感器,磁力计或陀螺仪,以便从系统应用处理器卸载传感器初始化,校准,数据补偿和计算功能,其中多个传感器输入可以很容易巩固。 MMA955xL充当智能传感集线器和高度可配置的决策引擎。系统总功耗很低,因为应用处理器在绝对需要时保持断电状态。
用于手持设备的传感器
对于手持设备,人机界面,虚拟现实和导航,请考虑Bosch Sensortec的BMA250(图4),这是一种数字三轴±2至±16 g加速度传感器,具有智能开启功能芯片运动触发中断控制器。采用小型12引脚LGA封装,占位面积仅为2 x 2 mm,高度为0.95 mm。片上中断控制器为新数据,斜率检测,抽头感应,方向识别,平面检测和低g/高g检测提供运动触发中断信号,无需使用微控制器。它可以测量三个垂直轴的加速度。 ASIC根据差分电容原理转换MEMS工作的输出。 BMA250的封装和接口符合众多硬件要求。 BMA可感应手机,手持设备,计算机外围设备,人机界面,虚拟现实功能和游戏控制器中的倾斜,运动和震动。
图4:Bosch Sensortec BMA250加速度传感器。
博世Sensortec BMC050是一款完全补偿的电子罗盘或eCompass,占地面积小。 6轴数字罗盘用于确定精确的倾斜补偿地磁航向信息,并提供精确的加速度传感器数据,采用FlipCore地磁传感技术和加速度计的MEMS传感器技术,采用3 x 3 x 0.95 mm LGA封装。
在三维空间中测量地球的地磁场,它还使用3轴加速度计测量动态和静态加速度以及传感器的倾斜度。当地磁传感器不能保持平坦(平行于地球表面)时,这种倾斜信息很重要。结合BMC050的输出信息,eCompass软件可提供独立于设备方向的精确航向数据。集成在该器件中的加速度计提供了上面讨论的10位数字加速度计BMA250的精度和功能。
BMC050提供的倾斜补偿方向信息的目标应用包括导航(例如,GPS增强/地图旋转),基于位置的服务(LBS)或增强现实,以及与压力传感器,室内导航相结合。由于其占地面积小,功耗低,功能集成度高,因此非常适合个人移动设备,包括手机,笔记本电脑,MP3播放器等。基本上,传感器融合是一个整体大于部分的总和。随着传感器提供更高的可靠性,速度,准确性和高级功能,传感器融合的概念将始终处于这些趋势的最前沿。
-
OPA847接入传感器后效果异常是为什么?2024-08-02 246
-
多个传感器间相互位置关系校准方法2018-11-09 2013
-
怎样用单个单相逆变器去监测多个接触式传感器?2021-05-10 1406
-
智能热传感器如何与微控制器结合使用?2021-06-15 1319
-
传感器应用中噪声的产生及其抑制方法2009-10-11 1294
-
无线传感器网络和网格结合关键问题研究2009-11-02 742
-
输入传感器,输入传感器是什么意思2010-03-11 2218
-
ST传感器介绍和怎样获得OSX授权2015-11-02 810
-
结合多个传感器的输入,产生更好的整体结果2017-07-05 904
-
多个传感器的输入的设计指南2017-09-14 767
-
虚拟现实和物联网的结合会带来怎样的影响2019-08-23 3559
-
多个3D智能传感器组网的多传感器网络介绍2019-11-04 2580
-
气压传感器与扫地机器人的结合将会产生怎样的效果2020-11-19 5228
-
酒精传感器的工作原理是怎样的2020-12-25 5547
-
线性传感器和非线性传感器的区别2024-10-21 2547
全部0条评论

快来发表一下你的评论吧 !
