

为机器人性能提供动力的校准传感器的性能介绍
描述
机器人现在能够执行大量的任务,其中许多任务可以在过去几年中直接追溯到传感器技术的改进。不仅单个传感器受益于小型化以及校准和灵敏度的提高,同样重要的是加入各种传感器 - 传感器融合 - 这为机器人提供了多任务处理能力,使它们能够远远超出它们的单一重复功能。被降级了几十年。
今天的非传统机器人应用包括字符识别,RFID跟踪,电子鼻,通信活动等等。今天的机器人具有更高的灵活性,更灵活,更具适应性和智能。
视觉,触觉,嗅觉,味觉和听觉方面的进步降低了新机器人应用的价格,同时提高了它们的准确性和可靠性。添加传感器来测量距离,光线,旋转,磁力,温度,压力,高度和倾斜度,机器可以用来响应周围的环境线索。机器人的传感器不仅能够实现检测,视觉,触摸等功能,而且机器人现在能够与周围环境进行物理交互(以及使用其他传感器监控自身)。
校准的重要性
对于所有这些应用,成功推进机器人使用的关键是能够校准板载设备。对于涉及传感器融合或基于视觉的操纵的机器人活动,必须校准传感器本身和操纵器(例如,相对于机器人臂长的视觉)。
当考虑到传感器融合环境中的每个传感器具有不同的误差特性时,挑战变得清晰。今天,每个机器人传感器和执行器都没有通用的校准框架,可以解决这些不同的误差特性。研究和开发现在专注于创建灵活框架的挑战,在添加每个传感器时,可以自动校准传感器融合机器人。
在可能的范围内,现在可以在部署之前或之后校准单个传感器。预部署校准的优点是可以降低成本,因为制造商可以一次校准大量传感器而不是单独校准。一旦安装了传感器,就地校准就会非常耗时,并且传感器会受到可能影响校准的环境因素的影响。但是,有助于抵达负责校准传感器的工程师。例如,OPTEK Technology的OCB100系列自动校准板和OCB100-KIT设计套件(图1)为工程师提供了一个机会,帮助设计人员熟悉各种基本光电传感器类型的功能,包括透射,反射,和流体。
该套件包括一个自动校准电路卡,可与每个传感器连接,使评估更容易。校准PCB可以通过板载Molex 70553-0038四针接头与几乎任何光电传感器连接。该电路提供自动校准,因此提供了一种简单的方法来利用可能在任何类型的传感器上提供的全系列生产设备。该电路允许工程师补偿光电系统中存在的制造变化,温度变化和器件老化。
图1:OPTEK Technology的OCB100-Kit。
OCB100系列旨在最大限度地减少因制造差异,温度变化和器件老化而导致的光器件变化。通过OCB100,设计工程师可以减少许多系统中存在的传感器到传感器的差异。通过为系统设计提供预先校准的传感器,工程师可以提高可靠性和一致性。每次校准系统时都会对LED或光电晶体管的降级进行补偿,从而使系统能够提供已知的,一致的输出电平,从而实现多年的一致质量。 OCB100系列设计用于即使断电也能保持校准设置,因此无需每次启动设备时都需要更快的启动速度。
机器人传感器
让我们看一下机器人应用中使用的几种常用传感器,以及它们如何发展以包含使它们更易于使用的高级功能。 VTI Technologies的SCC1300-D02(图2)将陀螺仪和3轴加速度计与数字SPI接口相结合,用于制导系统,导航,运动分析和控制以及机器人控制系统。
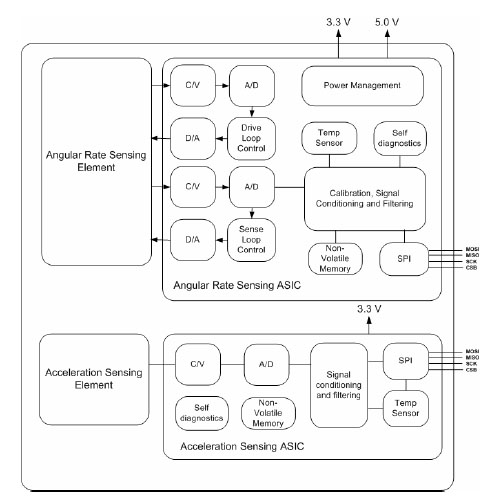
图2:SCC1300组件框图(由VTI Technologies提供)。
该传感器基于电容式3D MEMS技术。该组件集成了角速率和加速度传感以及灵活的独立数字SPI接口。虽然角速率传感器偏置稳定性对所有机械振动和冲击特别不敏感,但该组件具有多种先进的自诊断和错误调节功能。
SCC1300传感器经过工厂校准。应用中无需单独校准。生产过程中的修剪参数包括灵敏度,偏移和频率响应。校准参数在制造期间存储在非易失性存储器内。在启动期间,从内部非易失性存储器自动读取参数。
STMicroelectronics的STEVAL-MKI062V2 iNEMO惯性模块V2演示板(图3)基于MEMS传感器和STM32F103RE,这是一款基于ARM的32位MCU,具有256至512 kB闪存,USB,CAN,11个定时器,3 ADC和13个通信接口。 MEMs传感器将加速度计,陀螺仪和磁力计与压力和温度传感器相结合,提供线性,角度和磁性运动的3轴感应,以及温度和气压计/高度读数。该解决方案结合了ST在小型化和传感器集成方面的进步。这种10-DOF(自由度)惯性系统代表了一个完整的硬件平台,可用于多种应用,包括人机界面和机器人。
为了帮助用户开发和分析,STEVAL-MKI062V2演示套件包括一个用于传感器输出显示的PC GUI和一个便于使用演示板功能的固件库。
图3:STEVAL-MKI052V2惯性模块V2演示板。
对于任何想要使用低成本且简单的距离测量方法进行设计的人来说,Parallax PING)))超声波传感器可以轻松测量移动物体和静止物体之间的距离。使用声纳测量从传输到回波的距离,并从该单元发射超声波脉冲。
在设置PING传感器时,您应该意识到温度会影响传感器可测量的空气中声音的速度。如果温度(°C)已知,公式为:
Cair = 331.5 +(0.6 x Tc)m/s
传感器工作范围0到70°C的误差百分比很大(在根据数据表,其幅度为11%至12%。使用转换常数来计算空气温度可以纳入其程序中(数据表提供了一个例子)。
图4:视差PING)))超声波传感器。
结论
鉴于快速扩展的传感器融合环境,传感器校准比以往任何时候都更加重要。至关重要的是,应用程序中的每个传感器设备都与变量的测量方式保持一致。如果不是,传感器数据最多可能是不可靠的,并且最坏的情况是无用的。随着先进技术的不断发展,经过良好校准的传感器将使机器人变得更加灵活,可靠,移动,并且是越来越多应用的理想选择。
-
纳芯微磁传感器技术推动人形机器人性能提升2025-06-03 1744
-
ADC在机器人位置传感器中的应用,性能兼容ADS12202024-03-15 1702
-
高精度传感器如何在创造机器人的自然动作中发挥作用?2022-03-04 2860
-
机器人传感器分类方法2021-09-16 2193
-
传感器数据如何为机器人技术中的人工智能提供动力2020-10-10 1615
-
改善传感器性能的办法介绍2020-08-05 2737
-
机器人传感器的类别和应用原理2018-11-08 2780
-
RoboMaster发布M2006动力系统!体积小、性能强,助力高性能机器人开发2018-05-11 14929
-
机器人传感器2018-01-03 3631
-
基于驱动机器人的校准传感器的设计指南2017-09-13 830
-
校准传感器:推动机器人性能的飞跃2017-07-12 791
-
未来机器人发展关键——多传感系统2015-02-04 5105
-
智能机器人对于传感器的需求2015-01-20 6541
全部0条评论

快来发表一下你的评论吧 !
