

步进系统实操图寄工作原理学习
电子说
描述
步进系统包括脉冲发生器PLC、单片机、步进驱动器、步进电机。
1、步进电机,是将电脉冲信号转变为角位移或者线位移的开环元件。在非超载的情况下,电机的转速取决于发脉冲的频率和细分数。
发脉冲频率直接影响速度,频率越大,速度越大,当然不能太大,力矩会不足,并且电机速度过快会丢步和抖动
细分数,比如1.8度的电机,走一步旋转1.8度,一圈360度,那么需要200步。如果不细分,我一秒发200个脉冲就可以走一圈。现在我设定细分为2,即一圈需要200*2为400步。我仍保持那个频率一秒200个脉冲,这时一秒只能走半圈。细分越大,控制定位越精确,速度也会相应变低,这个时候只能提高脉冲发生频率。
电机的停止位置取决于发的脉冲数目。
在细分数不改变的情况下是这样。发的脉冲越多,电机动作时间越长。如果改变细分的话,如上面所分析一样,会对位移有影响。
综上两点,调试时首先要确定脉冲细分数,以达到对位置的精确控制。对于速度,我们可以通过加大频率来给予补偿。但是,在某些情况下,电机已经不能正确响应PLC给定的频率时,需要调小细分以达到一个适中状态。
2、步进电机的工作原理
步进电机工作实际上是电磁铁的作用
当某相定子励磁后,它吸引转子,转子的齿与该相定子磁极上的齿对应。这时,转子转动一个角度。当换一相得电时,转子又转动一个角度。就这样不断轮流通电,转子不停地转动。

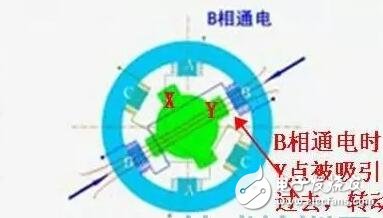
从图可以看出,电机的运行方向与我们通的AB电的相序有关。而电机的速度就与我们切换AB电的频率有关。当然,这是一个模型图,定子绕组ABC不只有这么三组,可以依次排列很多组,6组,9组,12组,不同的磁极数,这就行成了不同的步距角。
有一个概念,步距角,每转一步的角度,这与电机定子绕组相数,转子齿数,电机结构有关。我们不需要深究,拿到一个电机,只需要知道是几相电机,步距角多少,电压电流多少即可。
3、关于步进驱动器
步进驱动器,从步进电机的转动原理可以看出,要使步进电机正常运行,必须按规律控制步进电机的每一组绕组得电。步进驱动器接收外部的信号是方向信号DIR和脉冲信号CP。
如果驱动器需要5V的控制信号,而我们只有24V电源,这时需要串联一个2K电阻。(24V-5V)/10ma=2K
4、步进驱动器的设置
A,电流设置
根据步进电机的工作电流,去调驱动器输出电流。电流越大,力矩越大。
B,静态电流设置
一般有25%,50%,75%,100%等不同的划分。意思是在停止状态,驱动器给步进电机多大的电流去抱死它,持续给哦。这个百分比是最大输出的百分比。在对于提升类负载,这个就有用了,静态时需要做功支撑重力。所以会调的比较大。对于水平类负载,停止状态时,转子不会被拖转的情况下,这个值一般调得就比较小。
C,细分设置
为了达到精确定位控制的有效途径。前面已经说过了,不赘述。
-
步进电机的基本工作原理2023-02-24 5827
-
一文了解步进电机的工作原理2022-10-17 6445
-
工业机器人焊接实操工作站有哪些特点2021-09-28 2136
-
工业机器人焊接实操工作站分享2021-07-02 1702
-
工业机器人打磨去毛刺实操工作站介绍2021-07-01 2381
-
PLC的工作原理学习课件免费下载2020-11-04 1643
-
步进电机及其工作原理高质量PPT学习资料2019-03-09 7114
-
感应子式步进电机工作原理2010-01-09 2431
-
磁阻式步进电机的工作原理2009-05-06 4609
-
步进电机的工作原理2009-03-30 9091
全部0条评论

快来发表一下你的评论吧 !
