

无人机航测与传统测量的比较,无人机在项目外业中的应用
电子说
描述
一、无人机航测与传统测量的比较
传统的测绘专业,给每个人的第一印象就是一个人身上背着仪器,肩膀扛着三脚架,翻山越岭,日晒雨淋,但是随着无人机航空摄影测量技术的发展,无人机航测在测绘领域中引发了一场革命性质的变化。无人机航测是无人机根据提前规划的航线,设置的重叠率,调整的相机参数,然后进行等时间或者等距离采集正射影像。无人机航测和传统测量的比较如表1-1所示。
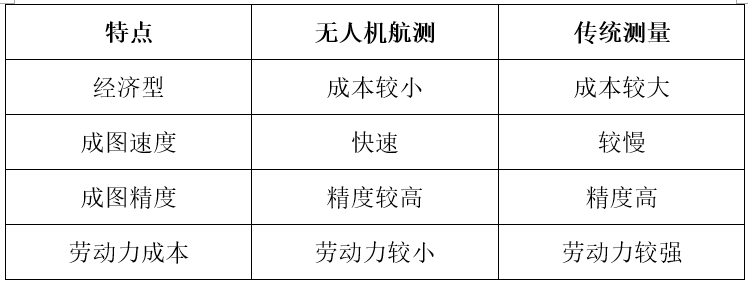
表1-1
通过上面表格的比较,我们可以看出传统的测量的地形图精度高,但是对仪器、人员等方面要求较高,同时还受外界因素(天气、温度、地形条件等)影响较大,无人机航测具有快速方便、劳动强度低等优点,同时也存在成图精度略低于人工测量的精度、空中飞行安全性低等缺点。
二、无人机在项目外业中的应用
1、测区概况
测区位于四川省达州市某个乡镇上,测区山势险峻,地形比较复杂,部分地区高差大约400米,绿色植被覆盖率较高。如果用传统的测绘方式来进行作业,那么不仅测绘的效率低、人工消耗量大,而且成图的精度也存在很大的问题。通过综合比较,故选择无人机航测来代替人工传统测量。本次航测选用的设备如表2-1所示。
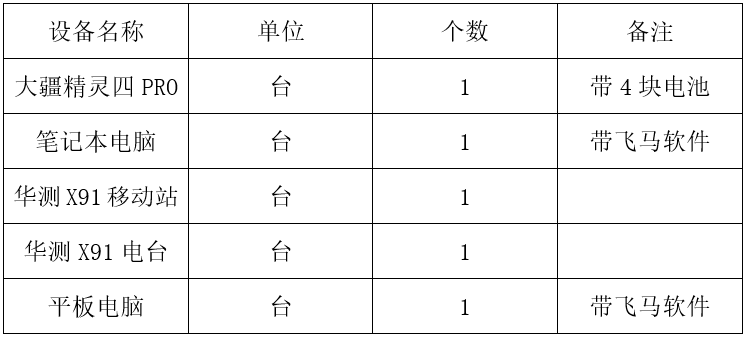
表2-1
2.无人机外业航飞作业流程
无人机航测主要包括了一下几个作业流程:1)测区的踏勘以及资料收集、2)无人机航线的规划和设计、3)调试飞机,调试相机参数、4)在飞马无人机管家中正式飞行。
1)测区的踏勘以及资料收集
本次外业航测,业主方主要提供了以下资料:
1. 测量任务书
2.测区的四等GPS静态控制测量成果
3.要求的测量的范围边界线
2)、无人机航线的规划和设计
根据业主提供的资料,我们选择在无人机管家软件中规划和设计无人机飞行的航线。如图2-1所示,在飞马无人机管家界面左上角,可以看到一个智航线的选项,点击智航线,就能够根据需要规划和设计航线。
图2-1
点击智航线之后,新建一个工程,并以此安置点项目的名称对这个工程文件进行命名。工程创建完成以后,根据业主提供的资料,需要将已有的测区范围kml 导入到软件自带的谷歌地图上。单击左边导入选项,选中测区范围的kml文件。导入成功之后,如图2-2所示,图中黄线框中的阴影部分就是本次需要航测的移民安置点面积。
如图2-2
由于大多数的测区形状是无规律的多边形,为了方便后期空三加密处理数据,同时也为了获得更高精度的成果资料,因此根据移民安置点的范围选择合理的飞行区域形状是非常必要的一件事情,在飞马无人机管家软件中,提供给用户可供选择的飞行区域类型有多边形、矩形、带状等种类。本着为了方便后期成图的原因,一般飞行区域我们都需要规划成矩形或者不带转折的条带。规划好的飞行区域如图2-3所示
图2-3
根据已经布置好的飞行区域范围,然后点击航线生成选项,选择好相对应的无人机机型,点击确认。本次航测选用的无人机机型是大疆精灵4PRO,选择好了对应的飞机型号,点击确认,航线自动生成完成。特别注意,这个时候生成的航线是一个基础航线,航线上的各个参数都会在左边全部显示出来,例如后期成图比例尺、影像航片的分辨率、航线航向重叠度、航线旁向重叠度、无人机的飞行速度、本架次飞行的相对航高、本架次的飞行时间以及测区的平均海拔,如图2-4所示。在这里可以根据具体的测量要求,调节每个架次的飞行参数。例如,最终成果需要提交1:500地形图时,可以根据要求,适当调高航向重叠率和旁向重叠率或者降低飞行高度。这两种方法中,在保证飞行安全的前提条件下,首先选择降低飞行高度。
图2-4
特别强调一下,所有的飞行参数必须在合理的范围之内,如果出现不合理的情况,则可能发生无人机无法起飞或者撞机等事故。在本次移民安置点航测工程中,我们要求最终提交1:1000的数字地形图成果,因此把航片分辨率设置成8cm,航向重叠度80%,旁向重叠度60%,以保证后期成图的质量。飞行区域以及航线生成完成以后,为了提高最终的成图精度,需要导出飞行航线,在航线的规划下,均匀的布置像控点和加密像控点。导出航线以后,找到飞行航线KML文件,然后导入到谷歌影像地图中。在导入飞行航线之后,接下来的步骤就是合理的布置像控点。像控点的布置遵守以下原则:
1、像控点需要选择明显的拐角处,以提高内业精度。
2、像控点标志尺寸大小应该在一米左右,最好布置成L形状,测量L点的拐角处。
3、像控点应该尽量选择地势平坦的地方,避免树林,房屋等容易被遮挡的地方。
4、像控点应该选择相对保存长久的材料,比如白色的油漆或者白色的涂料。且布置像控点的地方也尽量选择人流量小的地方。
5、像控点应该均匀的分布在测区的四周,对精度要求高的地方,应该格外布置加密像控点。
6、像控点尽量布置在两条相邻航线的中间,以便增加后期空三刺点的度数。
根据以上的布置原则,我们把整个测区的像控点布置成为如图2-5所示,其中1、3、4、5这四个点分布在测区的四周,属于基础像控点,6号点位于测区的正中间,属于加密像控点。这些像控点的布设完成以后,就可以利用华测X91移动站依次把每个像控点数据采集下来,并且做成标准的像控表格。
图2-5
3)调试飞机,调试相机参数
完成上述的像控采集工作后,就可以在测区的附近选择一个最近的起飞点。起飞点选择要求地势平坦,四周开阔,没有过多的遮挡且距离第一个拍照点200米以内。满足上述要求的起飞点才可以在第一个拍照点正常的启动拍照命令,否则会出现掉照片的情况。起飞点选择好以后,然后安装好大疆精灵4PRO的旋翼以及电池,进行飞行前的常规工作检查,保证不会出现人为的机械故障。检查完毕以后,最好进行一次手动操作的试飞。进行手动试飞的目的是调节相机的感光度和光圈,保证航片质量最佳。经过多次的综合测试,晴天的光圈建议选择5~7这个参数范围,ISO值选择200,阴天的的光圈建议选择2~4这个参数范围,ISO值选择400,这样的参数拍出的航片质量最好。
4)在飞马无人机管家中正式飞行
完成试飞之后,可以开始在软件中正常飞行,巡航。首先无人机垂直上升,然后到达计算好的高度以后,水平飞行,向第一个拍照点前进。在到达第一个拍照点之后,开始调整姿态,沿着布置好的航线进行水平巡航工作。每个架次的飞行完成后,会得到若干张带像控点的航片,如图2-6所示。这个环节中飞马软件会全程监控无人机飞行的整体情况,监控的范围包括电池的剩余电量、实时图传、飞行高度、飞行速度等,并且全程会有语音提示。无人机从垂直起飞到水平巡航,再到最后的返航,整个过程在飞马软件中基本实现了全自动化。
图2-6
三、无人机航片在项目内业中的成图
外业航测完成之后,获得了一个架次的若干张航片,根据需求进行内业空三计算。我们把一个架次的航片,导入到GODWORK软件中,进行空三内业处理,具体的空三步骤如下:
1、对导入的航片进行一键空三操作,进行影像的识别、匹配。
2、影像匹配完成以后,我们需要对影像进行DEM构图。
3、构图完成之后,再导入像控点,依次对像控点进行刺点。
4、完成两个或者三个刺点工作之后,对整个构图网进行平差。如果平差之后构图网没有破坏,继续重复步骤3中的刺点工作。
5、所有的像控点刺点完成,平差合格之后,输出测图模式。
输出了测图模式,然后把测图模式输出的成果导入到生成立体相对的软件中,生成立体像对,然后对每个像控点进行依次检查,校核,并且输出相对成果。最后利用已经生成的相对,绘制出1:1000的数字地形图。输出的成果如图3-1所示。
图3-1
四、成果分析
经过外业航测和内业成图,最终得到了移民安置点1:1000的地形图成果。同时我们对这个区域的成果进行了外业调绘,调绘的对象主要以房屋、电杆,道路以及特征点为主。经数据对比对比发现,大疆精灵四PRO基于飞马无人机管家APP航测得到的最终成果图满足1:1000数字地形区的要求。
五、总结
通过本项目的实践,可以看出大疆精灵四PRO在飞马无人机管家软件中能够顺利的完成航测任务,同时最终的成果资料也能够满足业主提出的1:1000地形图的精度要求。在整个航测的过程中,对于飞马无人机管家软件有了一个深入的了解,现将飞马无人机管家软件的优点总结一下:
1.飞马无人机管家软件中嵌入了谷歌高程模型。这一点对于航测来说,非常的方便,同时也相当的重要。在任意的一个地方,无人机飞行器通过本身内置的GPS定位,再通过飞马无人机软件获得一个比较准确的高程,因为飞马软件中嵌入了谷歌高程模型,故可以通过定位和获取的高程来观察周围的地形和环境,然后计算出合适的相对飞行高度,也避免了无人机撞山的危险。
2.飞马无人机管家软件中具有导入和导出KML功能。导入KML功能,可以直观的看出测区的范围,形状,状况等,然后根据导入的KML范围,选择一个规则的飞行区域。当在无人机管家中规划好了全部航线,然后就离不开导出KML功能,把规划好的航线以KML的形式导出,然后在导入到谷歌影像中,这样可以更加的方便布置像控点。在谷歌影像中,可以清晰的,均匀的布置好每一个像控点。
3.飞马无人机管家APP具有的智能化的设计。飞马无人机APP在整个航测过程中一直都处于核心的位置,其实有很多的智能的小细节做的特别好。大疆精灵4PRO在很多软件中最大的速度10M/S,但是在飞马软件中,最大的速度可以到达15M/S,这一点很多程度上提高了航测的效率。当剩余电量不足30%的时候,飞马无人机软件会自动报警,然后开始强制返航,这一点也是设计的特别好,为用户的无人机安全着想。还有飞马无人机管家会主动为用户加载禁飞区、限飞区,为用户减少不必要的麻烦,飞马无人机管家还会提示高空的风力情况。这些一个个智能化的小细节为我们用户每一次的安全飞行保驾护航。
-
无人机遥感技术2016-03-11 7746
-
【ELF灵翼自拍无人机申请】灵翼航拍无人机测评2016-04-19 2796
-
限制无人机发展的因素有哪些2016-06-08 3722
-
普及无人机知识2016-06-24 3893
-
无人机飞手紧缺 看无人机行业发展趋势如何?2016-06-28 4020
-
无人机培训2017-02-13 4072
-
都在谈论无人机:教你10种利用无人机赚钱的方法2017-02-17 11345
-
无人机侦测和反制系统2017-04-05 8386
-
天途航测无人机受关注,倾斜摄影技术遥遥领先2017-06-12 3723
-
无人机技术解答2017-11-15 28617
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 3604
-
常见的无人机基础知识问答2019-07-11 3840
-
无人机探测技术2020-07-29 2767
-
航测无人机怎么选择2020-05-27 1661
-
无人机航测技术的特点优势和应用对比2020-08-19 6229
全部0条评论

快来发表一下你的评论吧 !
