

Sensor 驱动框架的整体架构详细介绍
描述
背景与概述
Sensor 是物联网重要的一部分,“Sensor 之于物联网”相当于“眼睛之于人类”。人没有眼睛就看不到这大千的花花世界,物联网没有了 Sensor 更是不能感知这变化万千的世界。
现在,为物联网开发的 Sensor 已经很多了,有加速度计(Accelerometer),磁力计(Magnetometer),陀螺仪(Gyroscope),光感计(Ambient light sensor),接近光(Proximity),气压计(Barometer/pressure),湿度计(Humidometer)等等。这些传感器,世界上的各大半导体厂商都有出产,虽然增加了市场的可选择性,同时也加大了应用程序开发的难度。因为不同的传感器厂商、不同的传感器都需要配套自己独有的驱动才能运转起来,这样在开发应用程序的时候就需要针对不同的传感器做适配,自然加大了开发难度。为了降低应用开发的难度,增加传感器驱动的可复用性,我们设计了 Sensor 驱动框架。
Sensor 驱动框架的作用是:为上层提供统一的操作接口,提高上层代码的可重用性;简化底层驱动开发的难度,只要实现简单的 ops(operations: 操作命令) 就可以将传感器注册到系统上。
整体框架
Sensor 驱动框架的整体架构图如下:
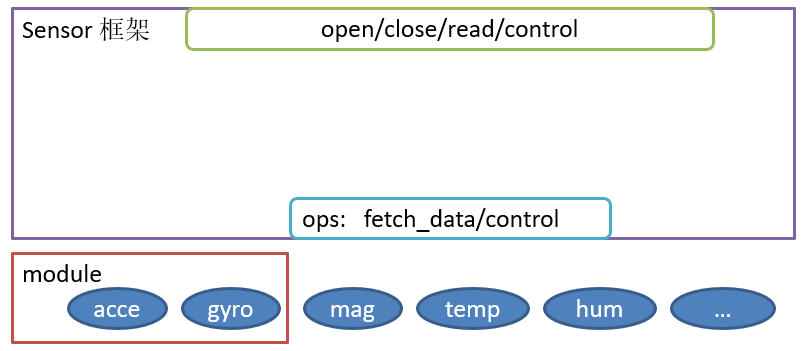
sensor
它为上层提供的是标准 device 接口open/close/read/write/control ,为底层驱动提供的是简单的 ops 接口:fetch_data/control。并且框架支持 module(模块),为底层存在耦合的传感器设备提供服务。
工作原理
Sensor 设备其实是对标准设备 rt_device 的一个丰富,是在原有标准设备的基础上增加了 Sensor 自己独有的一部分 属性 和 控制命令 ,如下图所示:
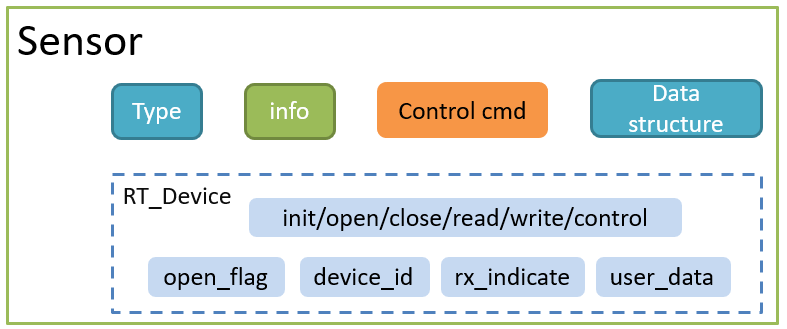
sensor
整个 Sensor 设备包括两个部分:
继承自标准设备的一些特性,包括:标准的控制接口 、回调函数、device_id 等。
Sensor 设备独有的部分,包括:Sensor 的类型、相关的信息、特有的控制命令、ops、以及一些 数据的结构。
sensor 的结构体
Sensor 设备的结构体如下所示:
1struct rt_sensor_device 2{ 3 struct rt_device
parent; /* The standard device */ 4 5
struct rt_sensor_info
info; /* The sensor info data */ 6
struct rt_sensor_config config;
/* The sensor config data */ 7 8
void
*data_buf; /* The buf of the data received */ 9
rt_size_t
data_len; /* The size of the data received */1011
const struct rt_sensor_ops *ops; /* The sensor ops */1213
struct rt_sensor_module *module; /* The sensor module */14};15typedef struct rt_sensor_device *rt_sensor_t;
Sensor 的信息
struct rt_sensor_info info 里存储的是一些与 Sensor 自身相关的信息,在 Sensor 设备注册的时候提供,在使用的过程中不应修改其内容。具体成员如下所示。
1struct rt_sensor_info 2{ 3 rt_uint8_t type;
/* The sensor type */ 4 rt_uint8_t vendor;
/* Vendor of sensors */ 5 const char *model;
/* model name of sensor */ 6 rt_uint8_t unit;
/* unit of measurement */ 7 rt_uint8_t intf_type;
/* Communication interface type */ 8 rt_int32_t range_max;
/* maximum range of this sensor‘s value. unit is ’unit‘ */ 9 rt_int32_t range_min;
/* minimum range of this sensor’s value. unit is ‘unit’ */10 rt_uint32_t period_min;
/* Minimum measurement period,unit:ms. zero = not a constant rate */11 rt_uint8_t fifo_max;
/* Maximum depth of fifo */12};
Sensor 的类型暂时只有以下几种,如果有新的传感器类型,可以提 PR 添加上。
1#define RT_SENSOR_CLASS_ACCE
(1) /* Accelerometer
*/ 2#define RT_SENSOR_CLASS_GYRO
(2) /* Gyroscope
*/ 3#define RT_SENSOR_CLASS_MAG
(3) /* Magnetometer
*/ 4#define RT_SENSOR_CLASS_TEMP
(4) /* Temperature
*/ 5#define RT_SENSOR_CLASS_HUMI
(5) /* Relative Humidity */ 6#define RT_SENSOR_CLASS_BARO
(6) /* Barometer
*/ 7#define RT_SENSOR_CLASS_LIGHT
(7) /* Ambient light
*/ 8#define RT_SENSOR_CLASS_PROXIMITY
(8) /* Proximity
*/ 9#define RT_SENSOR_CLASS_HR
(9) /* Heart Rate
*/10#define RT_SENSOR_CLASS_TVOC
(10) /* TVOC Level
*/11#define RT_SENSOR_CLASS_NOISE
(11) /* Noise Loudness
*/12#define RT_SENSOR_CLASS_STEP
(12) /* Step sensor
*/
其他的几个成员,分别是厂商、model(如:“mpu6050”)、传感器数据的单位、通信接口类型、测量的最大范围、测量的最小范围、最小测量周期、硬件 FIFO 的最大深度。
Sensor 的配置
Sensor 驱动框架抽象出了一些公共的配置选项,这些可配置的选项置于 struct rt_sensor_config 里, 成员如下:
1struct rt_sensor_config2{3 struct rt_sensor_intf intf; /* sensor interface config */4 struct rt_device_pin_mode irq_pin; /* Interrupt pin, The purpose of this pin is to notification read data */5 rt_uint8_t mode; /* sensor work mode */6 rt_uint8_t power; /* sensor power mode */7 rt_uint16_t odr; /* sensor out data rate */8 rt_int32_t range; /* sensor range of measurement */9};
这些配置项中的 intf 和 irq_pin 是为了将传感器和硬件解耦而抽象出来的,通过在底层初始化的时候传入 struct rt_sensor_config 这个参数,完成了通信接口的解耦。
1struct rt_sensor_intf2{3 char *dev_name; /* The name of the communication device */4 rt_uint8_t type; /* Communication interface type */5 void *user_data; /* Private data for the sensor. ex. i2c addr,spi cs,control I/O */6};
其余的一些配置项是用 Sensor 特有控制命令控制的,如下所示:
1#define RT_SENSOR_CTRL_GET_ID (0) /* 读设备ID */2#define RT_SENSOR_CTRL_GET_INFO (1) /* 获取设备信息 */3#define RT_SENSOR_CTRL_SET_RANGE (2) /* 设置传感器测量范围 */4#define RT_SENSOR_CTRL_SET_ODR (3) /* 设置传感器数据输出速率,unit is HZ */5#define RT_SENSOR_CTRL_SET_MODE (4) /* 设置工作模式 */6#define RT_SENSOR_CTRL_SET_POWER (5) /* 设置电源模式 */7#define RT_SENSOR_CTRL_SELF_TEST (6) /* 自检 */
结合 ops 中的 control 接口使用,就可以完成传感器的配置了。
Sensor 数据的存储
为了方便数据的解析,规定每一个类型的 Sensor 都有自己独有的数据结构,这些成员之间使用共用体以减少代码量。
特有的 ops
ops(操作函数)包含两个函数指针, 一个的作用是获取传感器数据(fetch_data),另一个的作用是通过控制命令控制传感器(control)。
1struct rt_sensor_ops2{3 rt_size_t (*fetch_data)(struct rt_sensor_device *sensor, void *buf, rt_size_t len);4 rt_err_t (*control)(struct rt_sensor_device *sensor, int cmd, void *arg);5};
注册方式
传感器驱动框架提供了一个 Sensor 注册函数,通过传入 Sensor 的控制块,名称,标志位和私有数据,就可以完成传感器设备的注册。
1int rt_hw_sensor_register(rt_sensor_t sensor,2 const char *name,3 rt_uint32_t flag,4 void *data);
这样看来 Sensor 驱动框架依托于标准的设备框架,只要将传感器驱动对接到 Sensor 的 ops 上,并通过调用 rt_hw_sensor_register 函数注册为 Sensor 设备就可以通过标准的设备接口控制传感器了。
module支持
module 的定义是解决底层有耦合的两个传感器而出现的,有些传感器既有加速度计的功能又有陀螺仪的功能,并且他们的FIFO是共用的,在 FIFO 模式下,只能将两个类型的传感器的数据同时读出,这就说明他们的数据是耦合的。
为了解决这个问题,我们定义了 module 的类型
1struct rt_sensor_module2{3 rt_mutex_t lock; /* The module lock */45 rt_sensor_t sen[RT_SENSOR_MODULE_MAX]; /* The module contains a list of sensors */6 rt_uint8_t sen_num; /* Number of sensors contained in the module */7};
里面包含有耦合的传感器的设备控制块指针,通过这个功能就可以在读取陀螺仪的数据的时候,同时更新加速度计的值,解决了底层耦合的问题。
-
北京迅为RK3568开发板OpenHarmony系统南向驱动开发内核HDF驱动框架架构2025-03-11 2180
-
一种基于AliOS Things的uData感知设备软件框架2018-01-22 5263
-
Linux内核电源管理的整体架构介绍2019-07-05 1954
-
USB驱动程序框架介绍2019-07-11 1840
-
HarmonyOS HDF驱动框架---驱动开发2020-09-16 1974
-
FPGA芯片整体架构2021-07-29 1750
-
FPGA 内部详细架构 精选资料分享2021-07-30 1714
-
数据采集整体框架2021-08-17 1184
-
初探Android系统整体架构2021-08-20 1999
-
cola os程序框架介绍2021-11-08 2153
-
RK平台PHY驱动与NXP的整体框架有哪些区别呢2022-02-10 3050
-
传感驱动模型框架原理和传感器抽象驱动适配开发过程分析2022-03-29 3476
-
RT-Thread Sensor框架和内置的lis2dh12驱动实现说明2022-05-17 4094
-
HarmonyOS多媒体框架介绍2023-01-03 1437
-
Linux DMA Engine框架的介绍2018-11-23 7225
全部0条评论

快来发表一下你的评论吧 !
