

分析MEC与C-V2X融合应用场景
电子说
描述
MEC与C-V2X融合可以对C-V2X端到端通信能力提供增强,也可以对C-V2X应用场景提供辅助计算、数据存储等支持。MEC与C-V2X融合具有网络信息开放、低时延高性能、本地服务等特性。不同的C-V2X场景可能需要其中某一个或数个方面的能力;同一个C-V2X场景也可能通过MEC与不同通信技术的组合来实现。


缩略语
3GPP第三代合作伙伴项目(the 3rd Generation Partnership Project)
AR增强现实 (Augmented Reality)
C-V2X蜂窝车用无线通信技术(Cellular Vehicle to Everything)
MEC多接入边缘计算(Multi-access Edge Computing)
RSU路侧单元(Road Side Unit)
MEC与C-V2X融合的内涵
多接入边缘计算(Mult i - a c c e s s Ed g e Computing,MEC) 概念最初于2013年出现,起初被称为移动边缘计算(Mobile Edge Computing),将云计算平台从移动核心网络内部迁移到移动接入网边缘。2016年后,MEC内涵正式扩展为多接入边缘计算,将应用场景从移动蜂窝网络进一步延伸至其他接入网络。
C-V2X是基于蜂窝(Cellular)通信演进形成的车用无线通信技术(Vehicle to Everything,V2X)技术,可提供Uu接口(蜂窝通信接口)和PC5接口(直连通信接口)1 。MEC与C-V2X融合的理念是将C-V2X业务部署在MEC平台上,借助Uu接口或PC5接口支持实现“人-车-路-云”协同交互,可以降低端到端数据传输时延,缓解终端或路侧智能设施的计算与存储压力,减少海量数据回传造成的网络负荷,提供具备本地特色的高质量服务。MEC与C-V2X融合的场景视图如图1所示。
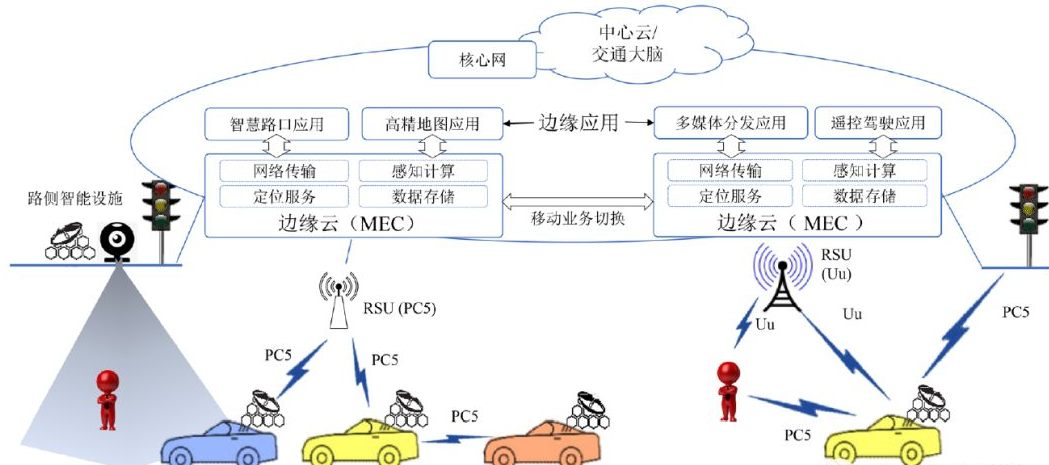
图1 MEC与C-V2X融合场景视图
MEC与C-V2X融合的特性
不同的C-V2X应用场景从时延、带宽和计算能力等方面对网络环境提出了各类不同要求。例如,在3GPP对eV2X(增强型V2X)场景的需求分析中(TR38.913),时延要求最严格的自动驾驶和传感器共享场景,对时延的要求最低达到了3ms;带宽需求最大的传感器共享场景,对带宽的要求最高达到了1Gbps;全局路况分析场景对服务平台的计算能力提出要求,要能快速对视频、雷达信号等感知内容进行精准分析和处理。
MEC与C-V2X融合可以对C-V2X端到端通信能力提供增强,也可以对C-V2X应用场景提供辅助计算、数据存储等支持。MEC与C-V2X融合具有网络信息开放、低时延高性能、本地服务等特性。不同的C-V2X场景可能需要其中某一个或数个方面的能力;同一个C-V2X场景也可能通过MEC与不同通信技术的组合来实现。
网络信息开放:在网络管理允许的情况下,MEC能够承载网络信息开放功能,通过标准化接口开放边缘网络的实时状态信息,包括无线网络信息、位置信息、用户信息等。例如,在C-V2X的应用中,对高精度定位的需求较大,利用MEC的位置信息开放可以辅助车载终端实现快速定位,有效提高定位效率和精度。另外,利用MEC开放的无线网络信息也可以对TCP传输的控制方法进行优化,有效规避高清视频等多媒体数据传输过程中发生的网络拥塞。
低时延高性能:MEC运行在靠近用户终端的网络边缘位置,能够显著降低C-V2X业务的传输时延、提供强大的计算与存储能力、改善用户体验。例如,驾驶安全类C-V2X业务对通信时延提出了苛刻的要求,将此类业务部署在MEC上,相比部署在中心云上可以显著降低业务响应时间。另外,MEC也可以为车载/路侧/行人终端提供在线辅助计算功能,实现快速的任务处理与反馈。
本地服务:MEC具备本地属性,可以提供区域化、个性化的本地服务,同时降低回传网络负载压力;也可以将接入MEC的本地资源与网络其它部分隔离,将敏感信息或隐私数据控制在区域内部。例如,在智慧交叉路口场景中,MEC可以融合和分析多个路侧及车载传感器采集的数据,并对大量数据提供实时、精确和可靠的本地计算与分析。
MEC与C-V2X融合的场景分类
MEC与C-V2X融合场景,可按照“路侧协同”与“车辆协同”的程度进行分类。无需路侧协同的C-V2X应用可以直接通过MEC平台为车辆或行人提供低时延、高性能服务;当路侧部署了能接入MEC平台的路侧雷达、摄像头、智能红绿灯、智能化标志标识等智能设施时,相应的C-V2X应用可以借助路侧感知或采集的数据为车辆或行人提供更全面的信息服务。在没有车辆协同时,单个车辆可以直接从MEC平台上部署的相应C-V2X应用获取服务;在多个车辆同时接入MEC平台时,相应的C-V2X应用可以基于多个车辆的状态信息,提供智能协同的信息服务。
在本白皮书的后文中,依据是否需要路侧协同以及车辆协同,将MEC与C-V2X融合场景分为“单车与MEC交互”“单车与MEC及路侧智能设施交互”“多车与MEC协同交互”“多车与MEC及路侧智能设施协同交互”四大类,如图2所示。对于每一大类场景,本白皮书会对其中的具体应用场景进行描述,并在场景小结中对各个应用场景中MEC的能力需求进行归纳总结。
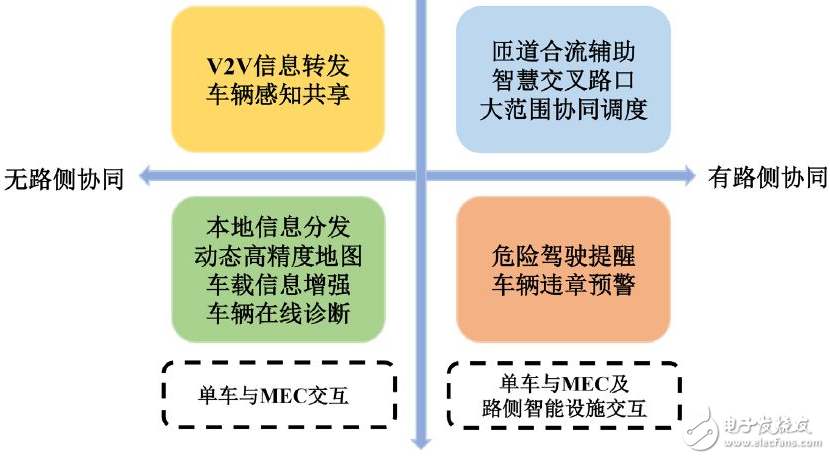
图2 MEC与C-V2X融合场景分类
单车与MEC交互场景
1 场景概述
在C-V2X应用中,本地信息分发、动态高精度地图、车载信息增强、车辆在线诊断等功能通过单车与MEC进行交互即可实现。应用场景如图3所示:
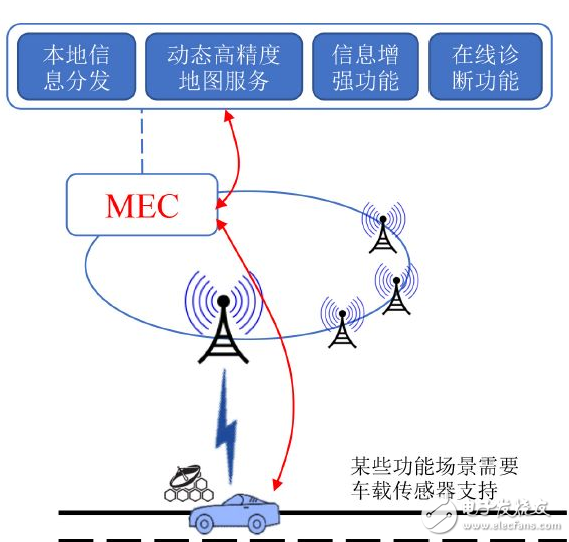
图3 单车与MEC交互场景示意图
2 本地信息分发
MEC作为内容分发的边缘节点,实现在线分发和流量卸载的功能。可为车辆提供音视频等多媒体休闲娱乐信息服务、区域性商旅餐饮等信息服务,或提供软件/固件升级等服务。
在此类场景中,MEC的部署位置可根据接入用户数和服务流量灵活选择,通常可选择部署在RSU或基站的汇聚节点后,为相对较大的范围提供服务。车辆无需装配智能传感器等设备,在网络部署了MEC及相应的功能服务后,具备对应通信模组的车辆可以直接使用此类服务。
3 动态高精度地图
MEC可以存储动态高精度地图车辆分发高精度地图信息,减少时延并降低对核心网传输带宽的压力。在应用中,车辆向MEC发送自身具体位置以及目标地理区域信息,部署在MEC的地图服务提取相应区域的高精度地图信息发送给车辆。当车辆传感器检测到现实路况与高精度地图存在偏差时,可将自身传感信息上传至MEC用于对地图进行更新,随后MEC的地图服务可选择将更新后的高精度地图回传至中心云平台。
在此类场景中,MEC提供存储高精度地图能力、用于动态地图更新的计算能力,同时提供与中心云的交互能力。在网络部署了MEC及相应的功能服务后,车辆可利用对应的通信模组使用此类应用服务,在车辆具备智能传感器时,可以通过上传自身传感信息对地图进行更新。
4 车载信息增强
MEC提供车载信息增强功能,车辆可将车载传感设备感知的视频/雷达信号等上传至MEC,MEC通过车载信息增强功能提供的视频分析、感知融合、AR合成等多种应用实现信息增强,并将结果下发至车辆进行直观显示。
在此类场景中,MEC提供用于视频分析、感知融合、AR合成等多个应用的计算能力,同时提供低时延、大带宽的通信能力。在网络部署了MEC及相应的功能服务后,车辆需装配智能传感器及显示设备,并利用对应的通信模组实现数据上传和下载。
5 车辆在线诊断
MEC可支持自动驾驶在线诊断功能。当车辆处于自动驾驶状态时,可将其状态、决策等信息上传至MEC,利用在线诊断功能对实时数据样本进行监控分析,用于试验、测试、评估或应对紧急情况处理。同时MEC可定期将样本及诊断结果汇总压缩后回传中心云平台。
在此场景中,MEC提供支持实时处理大量数据的计算能力、数据存储能力和低时延的通信能力,同时提供与中心云的交互能力。在网络部署了MEC及相应的功能服务后,车辆需将自身传感、决策、控制信息通过对应的通信模组上传至MEC。
6 场景小结
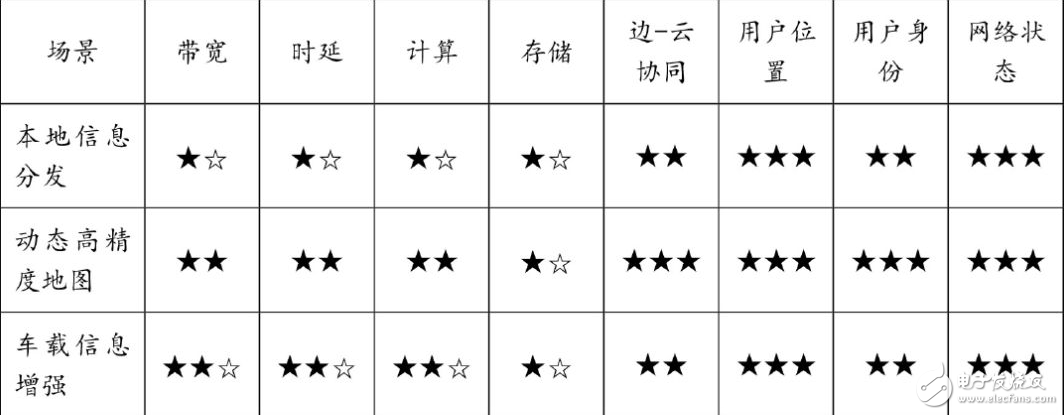
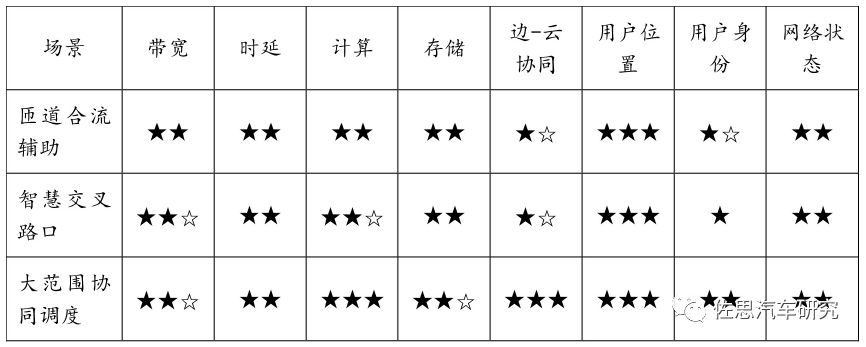
本白皮书对每一大类场景中具体应用场景对MEC的能力要求按照“带宽”、“时延”、“计算”、“存储”、“边-云协同”、“用户位置”、“用户ID”、“网络状态”等8个子项进行了分类统计。统计结果定性的以星级进行描述,★代表1星,☆代表半星,每个要求子项的定义为:
● 带宽:★代表10Mbps以下,★★代表10~100Mbps,★★★代表100Mbps以上;
● 时延: ★ 代表100ms以上, ★ ★ 代表20~100ms,★★★代表20ms以下;
● 计算:★代表支持信号控制级计算能力,★★代表支持图像处理级计算能力,★★★代表需要支持智能决策、视频编解码、大数据分析类计算能力;
● 存储:★代表TB级存储或支持内存数据库,★★代表PB级或支持结构性、关系型数据库,★★★代表EB级或支持海量非结构性数据库;
● 边-云协同/用户位置/用户ID/网络状态:从零星至★★★分别代表了统计意义上对该要求的需求程度,零星表示完全不需要,★★★表示完全必需。
在单车与MEC交互场景中,车辆与部署在MEC上的服务进行交互,无需路侧智能设施及其他车辆参与。在此类场景中,各具体应用场景对MEC的能力要求如表1。
表1 单车与MEC交互场景对MEC的能力要求
单车与MEC及路侧智能设施交互场景
1 场景概述
在C-V2X应用中,危险驾驶提醒、车辆违章提醒等功能可通过单车、路侧智能设施及MEC进行交互实现。应用场景如图4所示:
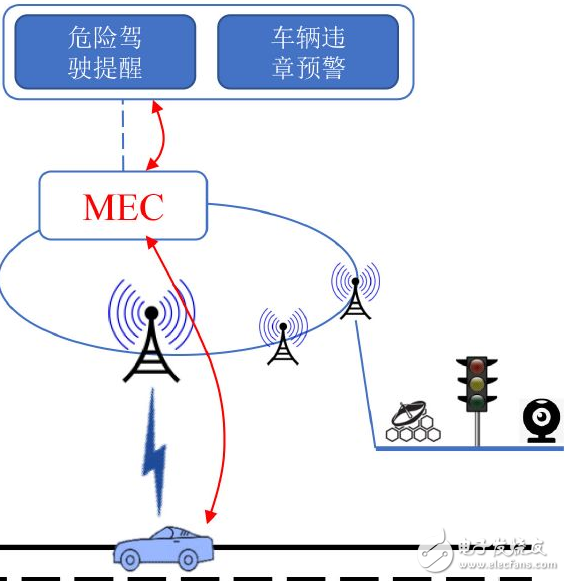
图4 单车与MEC及路侧智能设施交互场景示意图
2 危险驾驶提醒
MEC部署了危险驾驶提醒功能后,可结合路侧智能设施,通过车牌识别等功能分析车辆进入高速的时间,定期为车辆提供疲劳驾驶提醒;或在夜间通过视频分析,提醒车辆正确使用灯光;或在感知到突发车辆事故时,提醒附近车辆谨慎驾驶;或在天气传感器感知到高温“镜面效应”、雨雪大雾等恶劣天气时,提醒车辆安全驾驶。此外,MEC可阶段性地将危险驾驶信息汇总后上传中心云平台。
在此场景中,路侧的各类传感设施实时将感知信息上传至MEC,MEC主要提供用于视频分析、感知融合、事件与消息整合等计算能力,保证传感信息传输的通信带宽,以及与中心云平台进行交互的能力,同时也应提供对跨基站、跨MEC业务连续性的必要支持。车辆无需装配智能传感器等设备,在网络部署了MEC及相应的功能服务后,具备对应通信模组的车辆可以直接使用此类服务。
3 车辆违章预警
MEC部署了车辆违章预警功能后,可结合路侧智能设施,通过视频识别、雷达信号分析等应用实现车牌识别,并对超速、逆行、长期占据应急车道等违章行为判定,并将违章预警信息下发对应车辆,提醒车辆遵守交通规则行驶。此外,MEC可阶段性将违章信息汇总后上传中心云平台。在此场景中,路侧的摄像头、雷达等智能设施实时将感知信息上传至MEC,MEC主要提供支持视频分析、信号处理、违章判定功能等计算能力,保证传感信息传输的通信带宽,以及与中心云平台进行交互的能力。在网络部署了MEC及相应的功能服务后,具备对应通信模组的车辆可以直接使用此类服务。
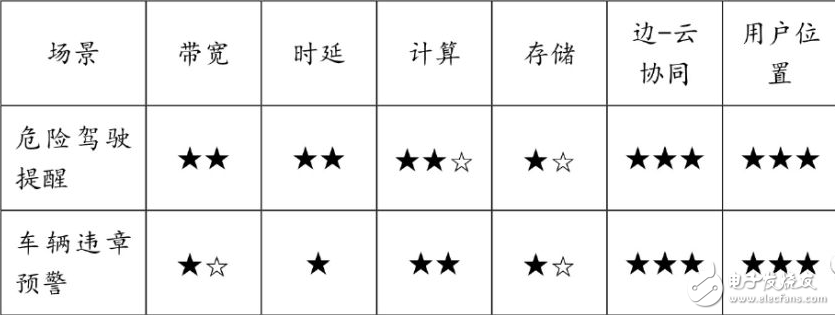
4 场景小结
在单车与MEC及路侧智能设施交互的场景中,车辆、路侧智能设施与部署在MEC上的服务进行交互,无需其他车辆参与。典型场景对MEC的能力要求如表2。
表2 单车与MEC及路侧智能设施交互场景对MEC能力要求
多车与MEC协同交互场景
1 场景概述
在C-V2X应用中,V2V信息转发、车辆感知共享等功能可通过多车与MEC协同交互实现。应用场景如图5所示:
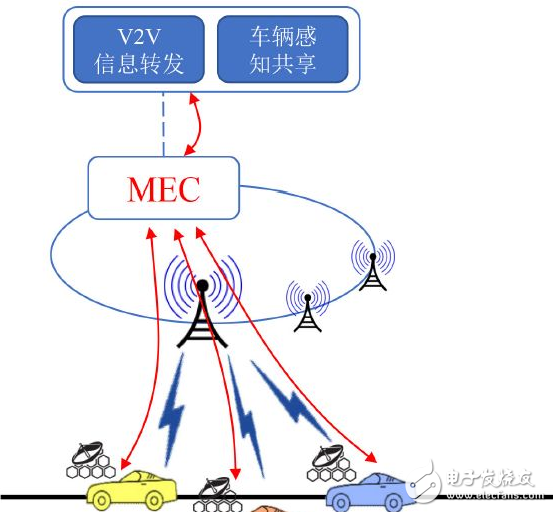
图5 多车与MEC协同交互场景示意图
2 V2V信息转发
MEC部署了V2X信息转发功能后,可作为桥接节点,以V2N2V的方式实现车与车之间的通信,实时交流车辆位置、速度、方向及刹车、开启双闪等车辆状态信息,提升道路安全。
在此场景中,车辆无需装备PC5通信模组,可通过Uu接口将车辆状态信息发送至MEC,并接收MEC下发的其他车辆信息。MEC应提供超低时延的信息传输功能。
3 车辆感知共享
MEC部署车辆感知共享功能,可将具备环境感知车辆的感知结果转发至周围其他车辆,用于扩展其他车辆的感知范围。也可以用于Seethrough场景,及当前车遮挡后车视野时,前车对前方路况进行视频监控并将视频实时传输至MEC,MEC的车辆感知共享功能对收到的视频进行实时转发至后方车辆,便于后方车辆利用视频扩展视野,有效解决汽车行驶中的盲区问题,提高车辆的驾驶安全。
在此场景中,MEC提供传感信息、视频流等信息的转发功能,需要保证低时延、大带宽的通信能力。在See-Through 应用场景中,需要对跨基站、跨MEC的业务连续性提供必要支持。配置了车载传感器/摄像头和C-V2X通信模组的车辆可向其他车辆共享自身传感信息,仅配置通信模组的车辆可接收其他车辆共享的传感信息。
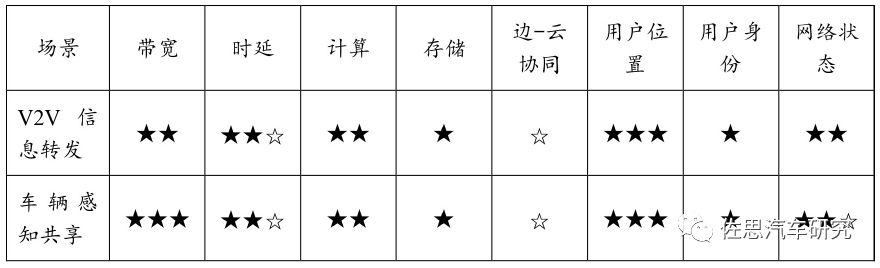
4 场景小结
在多车与MEC协同交互场景中,多个车辆与部署在MEC上的服务进行交互,无需路侧智能设施参与。典型场景对MEC的能力要求如表3。
表3 多车与MEC协同交互场景对MEC能力要求
多车与MEC及路侧智能设施协同交互场景
1 场景概述
在C-V2X应用中,匝道合流辅助、智慧交叉路口、大范围协同调度等功能可通过多车、路侧智能设施及MEC进行协同交互实现。应用场景如图6所示:
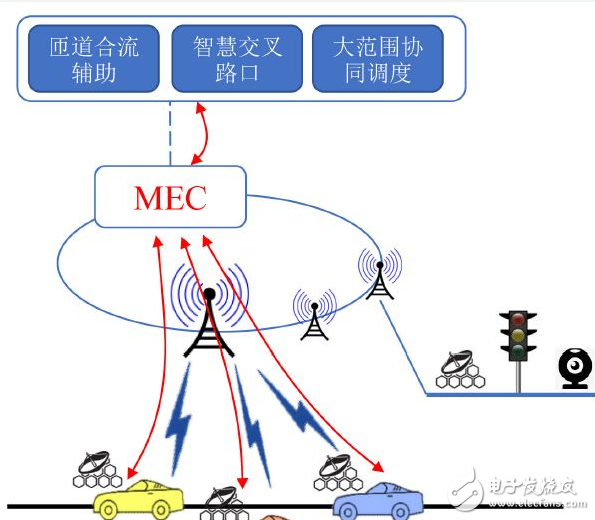
图6 多车与MEC及路侧智能设施协同交互场景示意图
2 匝道合流辅助
MEC部署匝道合流辅助功能,在匝道合流汇入点部署监测装置(如摄像头)对主路车辆和匝道车辆同时进行监测,并将监测信息实时传输到MEC,同时相关车辆也可以将车辆状态信息发送至MEC,MEC的匝道合流辅助功能利用视频分析、信息综合、路况预测等应用功能对车、人、障碍物等的位置、速度、方向角等进行分析和预测,并将合流点动态环境分析结果实时发送相关车辆,提升车辆对于周边环境的感知能力,减少交通事故,提升交通效率。
在此场景中,MEC提供用于监测信息分析及环境动态预测的计算能力,以及低时延、大带宽的通信能力。车辆可通过Uu通信模式与MEC直接交互,或通过PC5通信模式经RSU与MEC进行交互。
3 智慧交叉路口
MEC部署智慧交叉路口功能,交叉路口处的路侧智能传感器(如摄像头、雷达等)将路口处探测的信息发送至MEC,同时相关车辆也可以将车辆状态信息发送至MEC。MEC的智慧交叉路口功能通过信号处理、视频识别、信息综合等应用功能对交叉路口周边内的车辆、行人等位置、速度和方向角等进行分析和预测,并将分析结果实时发送至相关车辆,综合提升车辆通过交叉路口的安全性和舒适性;同时MEC的可以通过收集和分析相关信息,对交通信号灯各相位配时参数进行优化,提高交叉路口的通行效率。
在此场景中,MEC提供用于路侧感知信息分析及路况动态预测的计算能力,以及低时延、大带宽的通信能力。车辆可通过Uu通信模式与MEC直接交互,或通过PC5通信模式经RSU与MEC进行交互。
4 大范围协同调度
MEC部署大范围协同调度功能,可在重点路段、大型收费口处借助视频传感信息,通过MEC进行路况分析和统一调度,实现一定范围内大规模车辆协同、车辆编队行驶等功能。或在城市级导航场景中,MEC根据区域车辆密度、道路拥堵严重程度、拥堵节点位置以及车辆目标位置等信息,利用路径优化的算法对车辆开展导航调度,避免拥堵进一步恶化。
在此场景中,MEC收集多种传感信息及大量车辆状态信息,提供海量数据处理、综合路径规划等计算能力,提供各类综合信息的存储能力,并提供与中心云平台进行交互的能力。此外,在大范围导航规划应用中,MEC还应提供对跨基站、跨MEC业务连续性的必要支持。MEC的部署位置可根据接入用户数和服务范围灵活选择。在网络部署了MEC及相应的功能服务后,具备对应通信模组的车辆可以直接使用此类服务。
5 场景小结
在多车与MEC及路侧智能设施交互场景中,多个车辆、路侧智能设施与部署在MEC上的服务进行交互。典型场景对MEC的能力要求如表4。
表4 多车与MEC及路侧智能设施协同交互场景对MEC能力要求
未来工作
在未来工作中,工作组将从以下几方面开展工作,持续推动MEC与C-V2X融合发展。
一是推动从时延、带宽、计算能力、存储资源、开放与协同能力、移动性支持等指标对MEC能力进行简单参考性分级,以加强应用场景需求与MEC网络或硬件能力的对应与匹配,推进MEC与C-V2X融合场景分步应用与发展。
二是推动MEC与C-V2X融合的标准化工作,规范数据接口与服务流程,积极联合产业各方主体共同开展测试床建设,为MEC与C-V2X融合的场景功能、平台性能、应用部署等提供测试环境,尽快开展解决方案的验证性测试,并利用测试结果对未来技术与产业的发展提供支撑。
三是持续开展深入研究,从技术与标准化方案、产业现状与趋势、商业模式等角度进一步深入探讨MEC与C-V2X融合的发展路线,并进行总结和成果输出。
-
C-V2X联合RTK技术的场景仿真方案2024-10-25 1997
-
C-V2X前装上车迎来爆发期!芯片、模组大厂进击,跨界融合推进车联网创新2023-05-28 9481
-
大话中国C-V2X通讯标准应用层标准2022-07-27 3339
-
5分钟成为车联网专家|如何实现C-V2X技术突破把住车联网发展命门 精选资料分享2021-07-27 2510
-
C-V2X 技术介绍 精选资料推荐2021-07-23 1612
-
解析C-V2X车联网的发展趋势2021-01-28 4708
-
C-V2X在未来车载通信的应用场景2021-01-08 4925
-
简单认识C-V2X2020-12-29 11288
-
车联网满足客户全部C-V2X射频协议相关测试要求2020-11-17 4090
-
Qualcomm携手汽车行业完成C-V2X大规模测试及互联互通应用示范演示2020-10-29 1055
-
基于C-V2X实现“聪明的车”+“智慧的路”方式实现智能交通和自动驾驶2020-07-09 1757
-
浅析C-V2X车联网会如何发展2018-10-06 8068
-
车联网C-V2X的概述和国际国内发展基础和现状及国内C-V2X发展建议2018-07-06 18744
-
Qualcomm发布 C-V2X 商用解决方案2017-09-21 7247
全部0条评论

快来发表一下你的评论吧 !
