

焊接机器人的组成部分
电子说
1.4w人已加入
描述
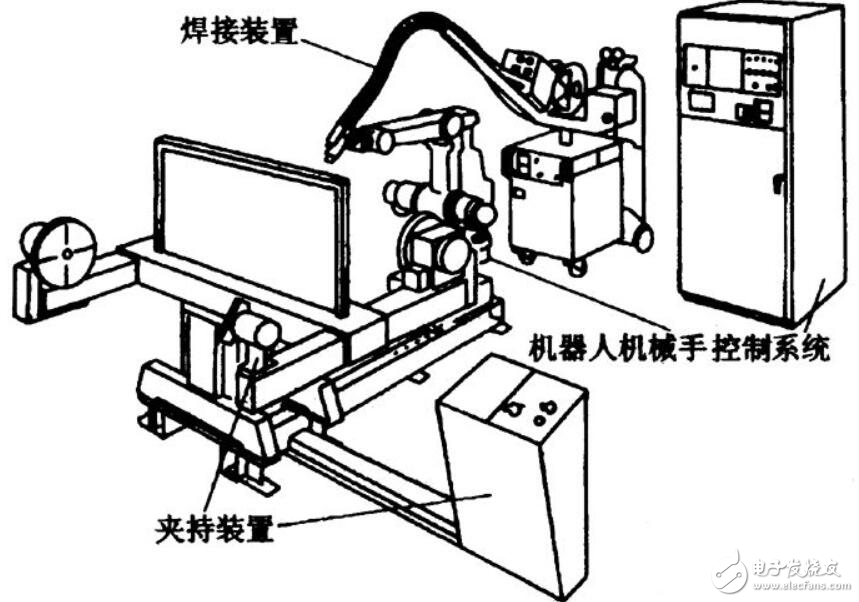
焊接机器人主要包括机器人和焊接设备两部分。机器人由机器人本体和控制柜(硬件及软件)组成。而焊接装备,以弧焊及点焊为例,则由焊接电源,(包括其控制系统)、送丝机(弧焊)、焊枪(钳)等部分组成。对于智能机器人还应有传感系统,如激光或摄像传感器及其控制装置等。
焊接机器人本体的机械结构主要有两种形式:一种为平行四边形结构,一种为侧置式(摆式)结构,侧置式(摆式)结构的主要优点是上、下臂的活动范围大,使机器人的工作空间几乎能达一个球体。因此,这种机器人可倒挂在机架上工作,以节省占地面积,方便地面物件的流动。但是这种侧置式机器人,2、3轴为悬臂结构,降低机器人的刚度,一般适用于负载较小的机器人,用于电弧焊、切割或喷涂。平行四边形机器人其上臂是通过一根拉杆驱动的。拉杆与下臂组成一个平行四边形的两条边。
早期开发的平行四边形机器人工作空间比较小(局限于机器人的前部),难以倒挂工作。但80年代后期以来开发的新型平行四边形机器人(平行机器人),已能把工作空间扩大到机器人的顶部、背部及底部,又没有测置式机器人的刚度问题,从而得到普遍的重视。这种结构不仅适合于轻型也适合于重型机器人。近年来点焊用机器人(负载100~150kg)大多选用平行四边形结构形式的机器人。除了以上产品外,公司同时还供应有可焊性测试仪、点胶机等产品。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
焊接机器人的结构组成是什么?2020-03-20 2475
-
焊接传感器一款转为焊接机器人而设计的焊缝跟踪传感器2020-06-16 1773
-
焊接机器人的结构与原理2020-11-16 7783
-
工业焊接机器人实训平台介绍2021-07-01 2877
-
焊接机器人及其应用2016-08-03 1405
-
焊接机器人及系统介绍(焊接机器人系统组成和编程方法及发展趋势)2018-02-28 29561
-
激光焊接机组成部分2019-05-08 8270
-
焊接机器人的分类介绍2021-09-03 6350
-
焊接机器人由哪些部分组成2022-11-25 3114
-
焊接机器人的组成有哪些部件2023-02-03 4753
-
焊接机器人工作站的组成部分有哪些2023-05-13 1906
-
如何选购焊接机器人2023-07-05 1653
-
焊接机器人如何进入自动焊接2023-08-24 1601
-
焊接机器人核心部件有哪些2023-09-04 1243
-
焊接机器人的应用领域有哪些2024-06-20 1413
全部0条评论

快来发表一下你的评论吧 !
