

如何实现伺服电机的精准定位
电子说
1.4w人已加入
描述
伺服电机是如何实现精准定位?如何理解它的闭环特性?今天我们就来说说。
首选我们看下交流伺服系列的组成。由伺服驱动器和伺服电机组成。这里我们主要讲述伺服驱动的工作原理,电机只是一个执行机构。驱动器的结构简图如下,和变频器的主电路类似,电源经过整流,逆变,实现从AC-DC-AC的转换。
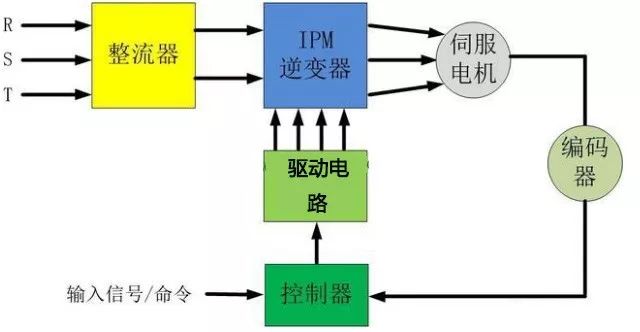
伺服驱动器结构简图
输入信号/命令可以是位置、速度、扭矩等控制信号,对应伺服电机的三种控制模式,每种控制模式都对应着环的控制,扭矩控制是电流闭环控制,速度模式是速度闭环控制,位置模式则是三闭环控制模式(扭矩、速度、位置)。下面我们对位置模式的三闭环进行分析:
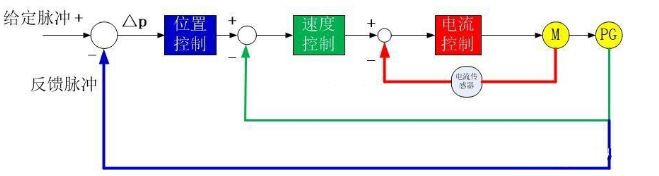
位置模式的三闭环控制
上图中M表示伺服电机,PG代表编码器,最外面的蓝色的代表位置环,因为我们最终控制的是位置(定位),内环分别是速度环和电流环(扭矩环),位置模式下速度环和电流环作为保护环防止失速控制和过载以确保电机恒速运转和电机电流恒定。我们重点看下位置环是如何确保电机能够准确旋转给定的角度。
假如我们给定脉冲为1个,此时反馈脉冲为0,脉冲偏差△p=1,输入到控制器中,这时候驱动电路控制IPM逆变器产生SPWM波驱动伺服电机旋转,注意这个SPWM波和我们发脉冲的方波是不一样的,时电机带动编码器旋转发出反馈脉冲,这个时候△p=0,电机停止输出,1个脉冲定位完成。整个从发出脉冲到接受反馈脉冲的过程就是一个闭环过程,从而确保电机能够准确定位,脉冲的数量决定定位的距离,脉冲的频率决定电机的转速。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
基于“互联网+”与北斗的精准定位智慧停车系统2017-08-08 4143
-
手机百度地图室内精准定位问题2018-02-02 5205
-
车载定位器室内精准定位方案2018-02-26 7237
-
如何精准定位电缆故障2019-03-28 2412
-
如何增强蓝牙接收信号强度,实现精准定位?2019-09-18 22594
-
UWB精准定位:让电厂更安全2020-07-30 1524
-
我国5G北斗精准定位技术已成熟2019-04-08 2758
-
伺服电机是如何实现精准定位?如何理解它的闭环特性?2019-12-09 19203
-
UWB技术是如何做到室内精准定位的?2022-10-18 1366
-
UWB室内精准定位系统方案2023-03-09 1668
-
Java厘米级高精准定位系统源码(支持UWB、蓝牙、WIFI定位)2023-06-14 1682
-
室内精准定位是什么?室内精准定位的方式有哪些?2024-07-09 1272
-
室内精准定位的应用范围?室内精准定位的方式有哪些2024-07-11 976
-
UTB定位技术能不能精准定位2024-09-03 2026
-
如何实现室内精准定位?分享室内精准定位技术及方法2024-09-24 2360
全部0条评论

快来发表一下你的评论吧 !
