

美国交通部卡车自动驾驶相关研究
描述
美国交通部卡车自动驾驶相关研究如下:
卡车列队行驶早期部署评估(2019-2021)
卡车列队行驶对桥梁的影响(2018-2020)
为自动化CMV开发基准安全性能措施(2017-2019)
CMV自动化应用传感器指南(2017-2019)
可行性研究:口岸与仓库低速自动化卡车列队行驶(2017 - 2018)
新兴城市货运概念(2019-2020)
卡车队列行驶仿真模型改进(2019年)
协作式自动驾驶研究出行应用(*2018-2020)

协作式自动驾驶研究项目
协作式自动驾驶研究项目专注于交通干线和高速公路,目的在于安全地提高运作效率并且最大化美国城乡道路通行能力。如降低交叉路口20%车辆的燃油消耗、节省10%的燃油以及使现有车道的通行能力加倍。

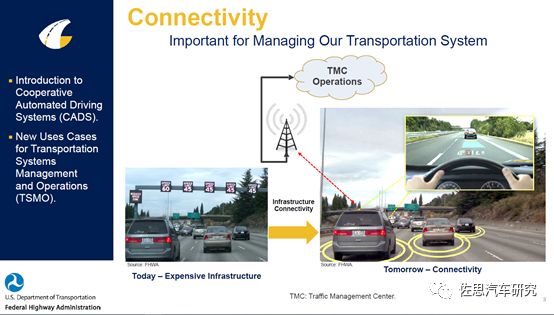
联网对于管理交通系统十分重要。通过联网,使当前造价昂贵的交通基础设施转变为简单高效的互联驾驶。
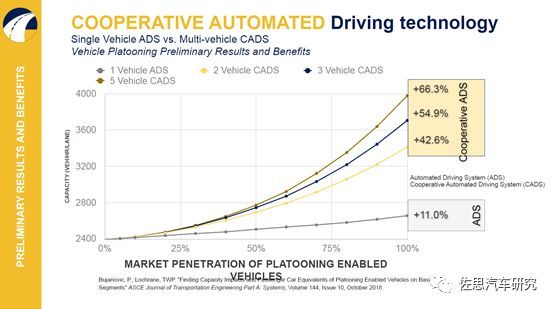
下图是单车自动驾驶系统与多车协作式自动驾驶系统的对比。从图中可以看出在市场渗透率相同的情况下,越多车辆的协作式自动驾驶系统,能够带来越高的道路通行能力。
本文中ADS指Automated Driving System 自动驾驶系统,CADS指 Cooperative Automated Driving System 协作式自动驾驶系统。TSMO指交通系统管理与运行(Transportation Systems Management and Operations)。
TSMO的策略如下:
工作区管理
交通事故管理
特殊事件管理
道路天气管理
运输管理
货物管理
交通信号协调
出行者信息
CARMA指协作式驾驶出行应用研究项目(CARMA: Cooperative Automation Research Mobility Applications)。CARMA的演变历程如下:
CARMA 1 (2014-2016):
概念的初步印证
个体应用收集
在MicroAutobox上运行Simulink/dSpace
演示多个应用:
1)开发列队算法
2)改进EAD(eco-approach and Departure)算法
3)改进速度协调算法
4)改进变道合并算法
CARMA 2 (2016-2018):
SAE L1级自动驾驶(速度控制),可进行L2级
基于ROS
灵活性:可以安装于各种类别的车型上
接受应用于研究的第三方插件 (指导算法)
包括简单的应用:
1)运用ACC
2)协作式变道
3)混合队列行驶
4)交叉口信号控制
5)速度协调
CARMA 3 (2018-2020):
SAE L2级自动驾驶(速度和转向控制),可进行L3级
更复杂的协作列表,譬如V2V
增强的变道合并编排
增强的列队行驶(轿车与卡车)
强调TSMO的基础设施交互(工作区、交通事故管理、天气等)
应急车辆应用与交互
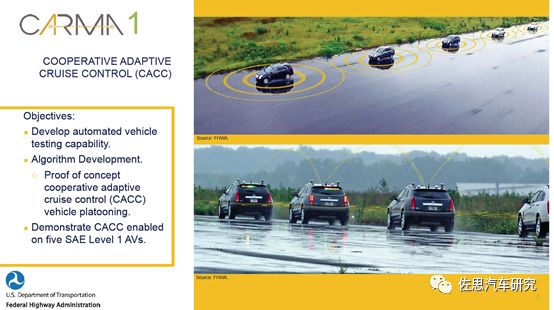
CARMA 阶段1:协作式自适应巡航
CARMA 阶段1的目标如下:
发展自动化车辆测试能力
算法发展(协作式自适应巡航车辆列队行驶概念的印证)
演示在5台 SAE L1 自动驾驶车辆上启用CACC(协作式自适应巡航)
CARMA 阶段2:集成化高速公路原型
CARMA 阶段2目标如下:
新的CARMA 2研究平台(开放资源)
算法发展(开放资源)
1)速度协调
2)车辆列队行驶
3)协作式车道变更
4)协作式坡道合并
5)交叉口信号控制驶入和离开

CARMA 2的研究重点:

协作式自动驾驶研究的算法概述如下:
速度协调(受云端控制的速度控制)
车辆列队行驶(引领者-跟随者)
协作式车道变更(V2V交涉)
协作式坡道合并(V2I交涉)
进入与驶离 (交叉路口多信号控制)
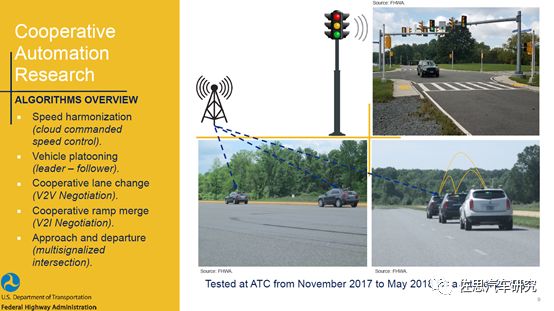
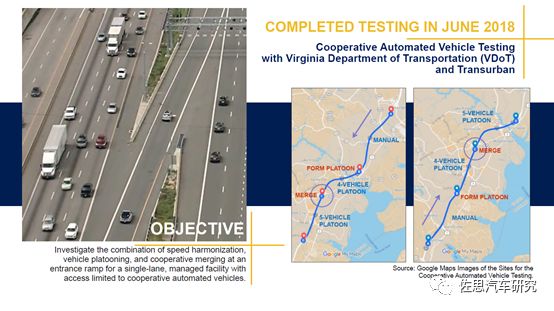
与佛吉尼亚交通部以及Transurban于2018年6月完成协助式自动驾驶汽车完整的测试,该测试的目的在于研究速度协调的组合、车辆列队行驶、在单车道的坡道入口处的协作式合并,以及管理协作式自动驾驶汽车的专用设施。
湿滑道路测试计划于2018年10月/11月进行。
引导算法升级包括:
1)单一车辆穿越多个交叉路口
2)在交叉路口队列中容纳一个未联网的车辆
3)集成队列车流量的基础设施感知
在TFHRC和FLETC进行验证测试

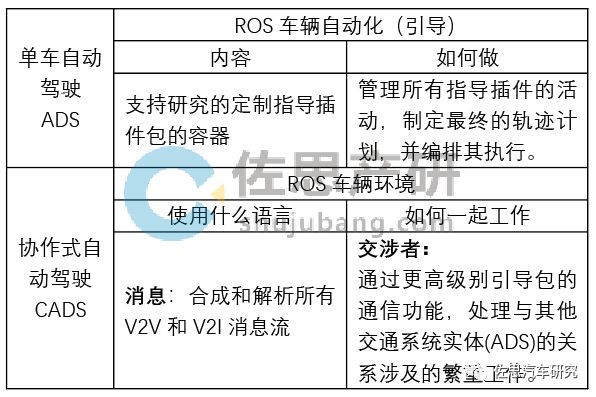
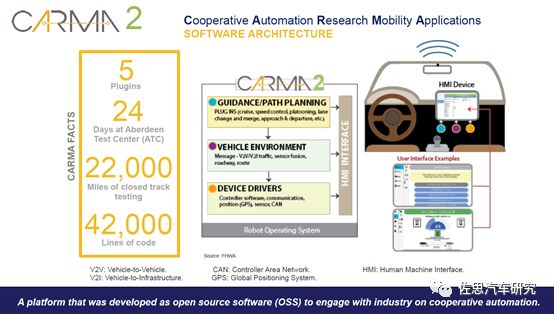
CARMA2协作式自动驾驶研究出行应用的软件架构
CARMA 2运用5个插件和42000行代码完成了在亚伯丁测试中心24天共22000英里的封闭道路测试。通过机器人操作,实现人机交互界面(HMI)显示相关驾驶信息。CARMA 2的ROS系统包括了指导/路径规划插件、车辆环境信息(V2V/V2I交通、传感器融合等)以及设备驱动等。作为开放源码软件(OSS)开发的一个平台,用于与行业进行协作化自动驾驶研究。
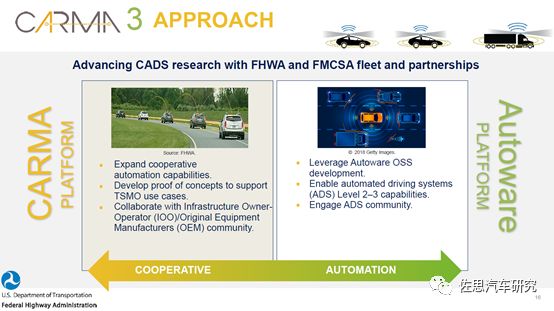
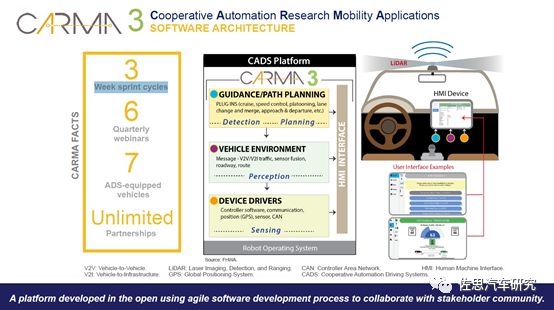
CARMA 3 美国交通部多种模式的合作关系
CARMA 3阶段主要与美国联邦高速公路管理局、美国联邦汽车运输安全管理局、智能交通系统联合规划办公室以及Volpe国家运输系统中心合作,完成协作式自动驾驶、交通管理、标准、合作、公共安全、货运以及数据等工作。

CARMA 3的方法:

CARMA 3软件架构
CARMA 3由3个冲刺周期、6个季度性在线研讨会、7辆配备ADS的车辆以及无限多个合作伙伴完成。通过ROS系统实现人机交互界面(HMI)显示相关驾驶信息。运用ROS系统以及LIDAR完成相应的任务。CARMA 3作为在开放式环境下开发出来的平台,运用敏捷的软件开发过程以与相关的利益团体进行合作。
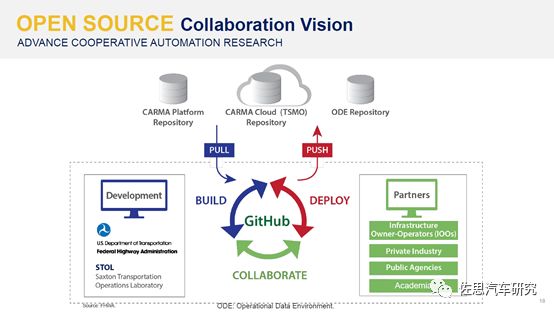
开放资源合作愿景:提升协作式自动驾驶研究
美国交通部、 Saxton交通运行实验室等研发部门与基础设施运营商、私人企业、公共代理机构以及学术界等合作伙伴利用GitHub开源项目托管平台进行共同合作、构建及部署相关资源。
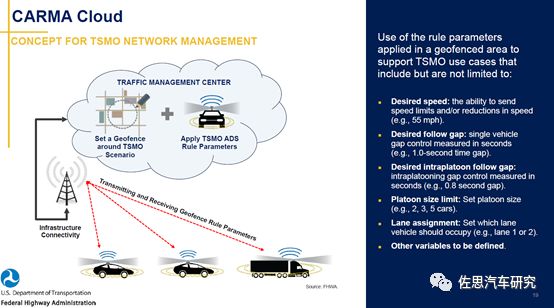
CARMA云
CARMA云是TSMO网络管理的概念,利用在地理围栏内应用的规则参数来支持TSMO应用案例,其包括但不限于:
理想的速度:发送限速信息或者减速信息的能力(例如55英里每小时)
理想的跟车距离:以秒为单位的单车间隙控制(例如1.0秒时间间隔)
理想的队列内部跟车距离:以秒为单位的队列内部间隙控制(例如0.8秒时间间隔)
队列规格限制:设置队列规格(例如2、3、5辆车)
车道分配:设置车辆应该占据哪一条车道
其他变量有待定义
ADS能力:TSMO应用案例发展
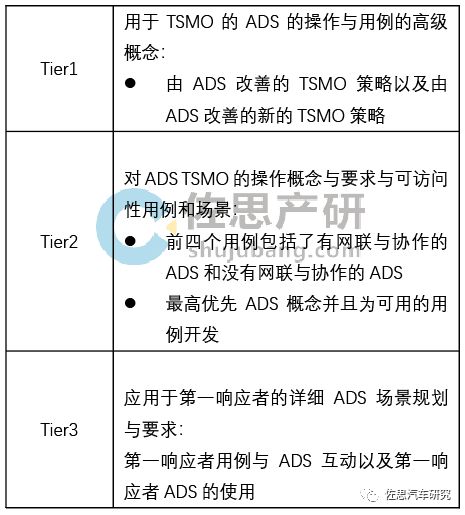
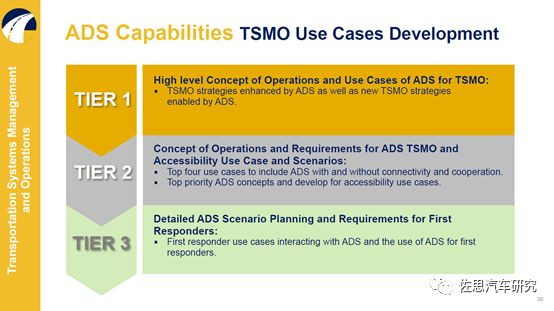
协作式自动驾驶应用场合


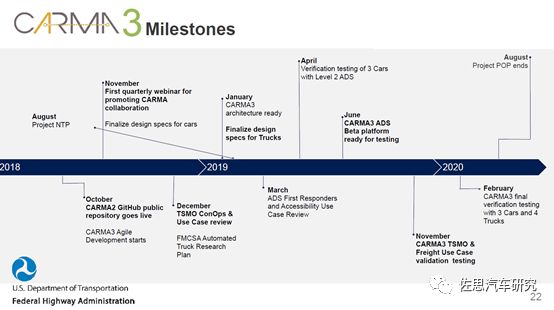
CARMA3里程碑
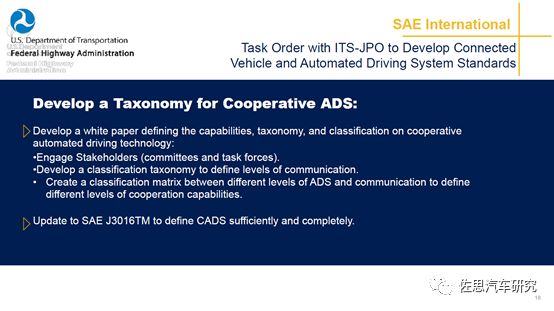
SAE国际 与ITS-JPO合作开发联网车辆和自动驾驶系统标准,为协作式自动驾驶开发一个分类法
开发一个白皮书来定义协作自动驾驶技术的功能、类别和分类
1)吸引利益相关者(委员会与工作组)
2)开发一个分类法来定义通讯的等级
3)在不同ADS和通讯等级之间建立一个分类矩阵以定义合作能力的不同级别
更新至 SAE J3016TM以充分且完整定义CADS
-
美交通部发布《自动驾驶汽车综合计划》,是自动驾驶4.0的延申2021-01-13 2801
-
交通部:积极支持围绕自动驾驶、车路协同等相关领域开展试点2020-11-11 2825
-
美国交通部正式公布了最新的自动驾驶汽车准则4.02020-01-15 4071
-
美国发布自动驾驶4.0计划 无人驾驶技术架构已初步完善2020-01-14 1182
-
美国自动驾驶4.0计划有3个核心2020-01-10 2780
-
如何让自动驾驶更加安全?2019-05-13 3621
-
美国发布自动驾驶汽车3.0新政,准备拥抱无人驾驶时代的到来2018-10-10 4621
-
准备迎接未来交通:自动驾驶汽车3.02018-10-09 7703
-
看看美国交通部部长赵小兰如何谈及自动驾驶?2018-08-20 4310
-
领先美国 中国自动驾驶卡车研发加速2018-06-01 740
-
自动驾驶或交通部认可 正在起草相关技术规范2018-02-08 706
-
美国交通部推出汽车间专用短距离通信技术 数据传输最远可达300米2016-12-14 1593
-
自动驾驶真的会来吗?2016-07-21 14079
-
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?2016-07-05 13708
全部0条评论

快来发表一下你的评论吧 !
