

高手分享:台达伺服调机实例
电子说
描述
伺服系统应用广泛,凡是需要精度控制的场合都离不开伺服系统。伺服系统一般由伺服驱动器和伺服电机构成,当然作为自动化设备的一部分,伺服系统还要和其他控制器(如PLC、触摸屏)等一道组成整个自动化系统。
伺服控制系统有三种控制方式:定位控制、速度控制和转矩控制,其中以定位控制居多,转矩控制也常用到,而速度控制用的相对较少,是因为变频调速已经非常成熟,无论开环还是闭环,都有很好的表现,且价格比伺服系统低很多,功率又大很多,因此单独用伺服来调速的较少。
看起来很普通的伺服驱动器,其实智能化程度很高,过流、过压、缺相、短路、抗干扰、自动调节等功能都具备,但有的需要通过设置启用该功能。所谓伺服调机,是指出现特殊故障,如启动转矩不足、出现共振造成输出不稳定、低速性能不理想、停机后仍然有“抖动”等不常见的故障时排除故障的一种方法或途径。
这里是一个台达伺服调机的例子:3KW的伺服电机,驱动器型号ASDA-AB,运行中出现停机不稳(偶尔出现停机后再“抖动”或多余进给),严重时造成ALM06号报警(过载),影响生产,需要解决。
鉴于后面需用到的一些伺服参数,在此先期介绍:
P0-02:驱动器状态显示(可显示运行速度、转矩、转动惯量比等)
P1-37:伺服电机惯量比
P2-23:共振抑制 Notch filter(带拒滤波器)
P2-24:共振抑制 Notch filter衰减率
P2-25:共振抑制低通滤波
P2-31:自动模式刚性及频宽设定
P2-32:增益调整方式
P0-02:用于驱动器液晶显示屏显示
可显示的内容有17项(00-16),调机用到14:负载/电机惯量比,也就是说我们要将P0-02设置为“14”(出厂为“00”),P0-02常用项含义如下:
00:电机反馈脉冲数(绝对值)[pulse]
02:脉冲命令脉冲计数 [pulse]
04:控制命令脉冲与反馈脉冲误差数 [pulse]
06:电机转速 [r/min]
11:平均转矩 [%]
12:峰值转矩 [%]
13:主回路电压 [Volt]
14:负载/电机惯性比 [time]
P1-37: 伺服电机惯量比
是指负载的惯量除以电机本身的惯量的比值。这个比值出厂设置为“5.0”,实际系统往往和这个值有差异,负载越大的系统,这个比值越大,反之越小。一般情况下,纵使实际比值比“5”大一些或小一些,运行起来关系也不大(系统会自动适应处理),但是要使系统性能最佳,或者说系统稳定性不好时还是要重新设置的。通过JOG运行(试运行)可以看实际显示值是多少(怎么看?将P0-02设置为“14”),然后写入到P1-37中;也可以通过伺服调机自动写入到P1-37中。
P2-32:自动调机开启
0:手动模式
2:PI自动模式(持续调整)
3:PI自动模式(负载惯量比固定,频宽可调整)
4:PDFF自动模式(持续调整)
5:PDFF自动模式(负载惯量比固定,频宽可调整)
P2-32可以设置为0、2、3、4、5(缺省为“0”),自动调机时先将P2-32设置为“2”,然后设置P2-31的值(如果是“0”,则P2-31无效)。
P2-31:自动调机设置(频宽及刚性设置)
P1-37: 伺服电机惯量比(正确的概念是负载惯量除以电机惯量的比值)手动测量的值写入到P1-37中,问题仍然没有解决,需要自动调机了,也就是说,让系统自动计算出伺服电机惯量比并写入到P1-37中。为此,需要设置P2-31:自动模式频宽及刚性设定。其参数为两位数,00-FF(16进制),出厂设置为“44”,十位数表示频宽,个位数表示刚性,个位数设置为“4”表示“刚性”不起作用,即刚性不变,只需设置十位数的频宽,即自动调整模式应答性设定:值越大频率响应越快。P2-31的设定还与P2-25有关,它们之间的关系可参考下表(表2):

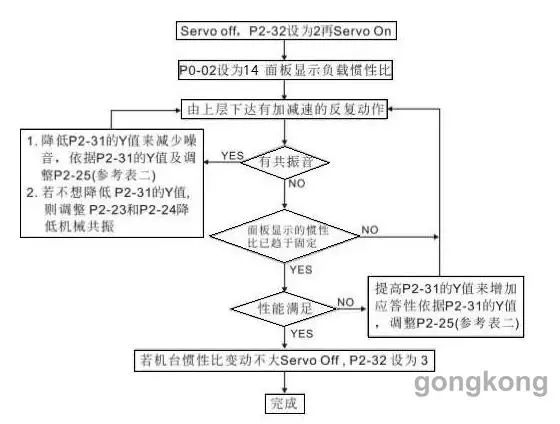
P2-31值越大,伺服系统响应越快但易过冲;反之,P2-31值越小,伺服系统易稳定但响应较慢。要判断实际情况,加大或减小P2-31的值,同时设置P2-25的对应值(见上表)。有时响应不能太慢,也就是说P2-31不能设置太小,这时可配合调节P2-23、P2-24的值进一步效果。总之,调机过程需要反复调试,比较费事。当最后效果不错时,将P2-32的值由“2”设置为“3”。整个调机过程结束。
伺服调机流程图:
总结:
伺服驱动器各种参数有的多达200个,很多参数正常运行时用不到,但也有不少参数是专门解决特殊问题的,当我们遇到特殊故障不好解决时,首先想到是不是有一些参数是解决类似问题的 ,这里列举一例即如此,希望对大家进一步掌握台达伺服系统有所帮助。
-
stm32f103c8t6单片机驱动台达伺服电机2021-11-18 2220
-
台达伺服驱动器回收,赣州上门回收台达PLC模块2021-10-27 636
-
重庆回收台达变频器,台达扩展模块,台达伺服2021-08-05 633
-
山东回收台达变频器,台达扩展模块,台达伺服2021-08-01 925
-
重庆长期回收台达变频器,台达扩展模块,台达伺服2021-07-19 635
-
上海收购台达伺服马达和台达伺服驱动电机2021-06-07 638
-
长年回收台达工控台达变频器伺服台达PLC2021-05-31 1112
-
江浙沪上门回收台达plc模块 台达伺服长期大量回收2021-02-23 449
-
求购台达plc收购台达伺服驱动器台达模块高价回收2021-01-07 1291
-
台达ASDA系列伺服驱动器PLC的控制实例参数设置及PLC程序免费下载2020-12-15 4415
-
台达伺服定位控制案例pdf下载2018-01-03 1801
-
台达PLC与交流伺服器在经编机上的应用2009-06-17 1316
全部0条评论

快来发表一下你的评论吧 !
