

自动驾驶如何找准定位的位置
电子说
描述
自动驾驶定位有两种主流方法:一种是绝对定位法,直接测出空间位置坐标;另一种是相对定位法,已知现在所处位置,和下一步移动的方向和距离,计算出下一步位置。
2000年,软银投资阿里巴巴,电商时代自此开始;20年后,软银9.4亿美元押注无人驾驶运货车创业公司nuro,这是否预示,20年自动驾驶时代即将开启?本文深入浅出讲自动驾驶,希望我们“时间有效率,时间有思考”。
我们日常驾驶使用app地图导航,输入所处位置、目的地后,地图软件会规划出适合的路径。地图APP的定位功能一般由GPS定位系统提供,精度在米级别,特殊环境会丢失定位信号。但得益于人类司机的视觉和经验,米级别定位已经能够满足导航需求。但想象一下,自动驾驶需要自主判断何时转向,分叉口选哪一条,立交桥上哪一层,对定位的精度和实时性要求极高,目前认为厘米级精度才能满足安全。
自动驾驶定位有两种主流方法:一种是绝对定位法,直接测出空间位置坐标;另一种是相对定位法,已知现在所处位置,和下一步移动的方向和距离,计算出下一步位置。
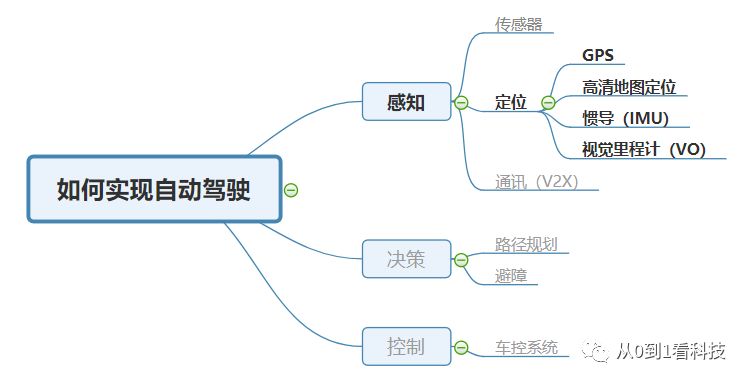
举个栗子:小明来到陌生的城市,可以通过地图APP中的GPS定位,或是通过对照周围街道和建筑物,在地图中找到自己位置;之后,小明向东走500米,右拐又走了500米,这时不再需要打开地图,就可以估算出是起始点东南方500*√2 的位置。自动驾驶两类定位方法,包括类似查阅地图的绝对定位:GPS和高清地图定位,也包括类似计算位移的相对定位:惯性传感器和视觉里程计(VO)。
I 绝对定位--GPS
GPS是一种卫星定位技术,起始于美国军方的项目,通过计算天上多颗卫星和目标之间的距离,实现目标定位。具体来说,卫星发出可以穿透大气层的低频电磁波信号,被目标的接收器天线接收,光速乘以信号传播时间,就是接收器和卫星的距离。理论上,目标接收器接收到3个卫星的测距信号,就可以根据三角定位原理定位出所在的位置。假设A卫星测量距离接收器1万千米,那么可以把接收器的位置限定在地球距离卫星1万米的圈圈轨迹上;B卫星2万千米,C卫星3万千米,同理得到两个可选轨迹;三个轨迹的交点,就是所在的位置,即通过画圈圈求交点实现定位。实际应用里面,接收器都是利用4个甚至更多的卫星,来更精确确定位置。
GPS的测距简单方便,但也会有误差。主要因为光速(真空中约300,000km/s)实在太快了,测量的信号传播时间稍微有些偏差,或是不同介质光速传播速度影响,就会导致距离误差无法忽视,对于实现厘米级定位精度提出了挑战。
为了降低GPS的定位误差,引入了差分GPS技术。举个栗子说明原理:小巨人小明身高2米26,这个身高已经过官方认证。小明的朋友小小明身高未知。一次,小明和小小明用同一台测量计量身高,显示小明身高2米36,小小明为1米60,小小明的真实身高是多少呢?这个例子中求解思路和差分GPS原理类似:通过比较已知量和测量量估算测量误差,用于待测目标的误差矫正。
差分GPS的具体做法是:在需要精确测度误差的区域安装接收机基准站,基准站的精确位置坐标已知。通过对比基准站GPS测量数据和其真实坐标,获得误差数据,来纠正附近定位目标的误差。通常基准站能够覆盖方圆100km内的定位目标,用差分GPS修正后误差能控制在亚米级别甚至厘米级别。
不过GPS和差分GPS相结合对于自动驾驶还不够用,主要原因有:城市环境的高楼大厦,会对卫星信号产生反射和折射,干扰测距;另外GPS还有个更新频率低的问题,民用GPS是10HZ,意味着0.1秒才会刷新一次定位数据,高速自动驾驶来无法容忍,必须和其他传感器搭配使用。
I 绝对定位--高精地图定位
高清地图定位也是一种绝对定位方法。高清地图精度很高,用户将所在位置环境信息匹配到高清地图中,能精确确定位置。根据主传感器不同,高清地图有激光点云地图和高清视觉地图。
1. 激光点云地图匹配
“传感器篇”中我们介绍过,激光雷达能够测距并形成点云,准确度高,是目前L3级以上自动驾驶中非常重要的传感器。基于激光雷达的点云地图匹配获得位置信息,是一种常用的办法。
这个定位方法首先需获得高精度激光点云地图。安装了激光雷达的地图采集车反复采集行驶道路的环境,制备成点云地图。自动驾驶车使用时,通过把激光雷达实时收集到的周围环境点云信息,和高清点云地图匹配,确定位置。
由于高清地图的数据量很大,定位目标通过激光雷达采集到的点云信息直接和整幅地图进行匹配计算量太大,因此经常结合GPS数据,先定位到一个局部的地图,然后在局部地图的范围内进行匹配,降低计算量。
这种方法的理论上精度很高,但也有短板,比如在天气不佳时激光雷达的测量会受到影响;再比如道路环发生变化,高清地图就要迅速修正,否则会影响匹配。
2. 高清视觉地图匹配
视觉地图匹配和激光匹配的原理类似。装有高清摄像头的地图采集车采集和制备高精度视觉地图,自动驾驶车行驶过程中,摄像头实时采集数据和高清地图数据比照,确定位置。
视觉所用的摄像头相对于激光雷达很便宜,但也面临两个主要问题:一个是对光照条件要求高,光照不足、光照过强、视野模糊等,都会导致图像的像素值发生较大变化,导致匹配失败;另外一个是算力要求高,实时的图片搜索匹配需要大量算力,往往需要使用GPU。
I 相对定位--惯性传感器(IMU)
不同于GPS和点云地图的绝对定位方法,惯导(IMU,Inertial measurement unit)通过测量加速度和角速度得到目标运动状态,从而计算出下一时刻的速度和行进到的位置,实现相对定位。
自动驾驶应用中,GPS和惯导(IMU)功能非常互补:惯导(IMU)计算的下一时刻位置是根据上一时刻位置推导,误差会一直累计下去,长时间运行后精度不能达到自动驾驶要求,所以隔一段时间就需要校准修正一次,相对准确的GPS就成了校准IMU的神器。于此同时,IMU更新频率高,通常为1kHZ,也能弥补GPS更新频率低的不足。

I 相对定位--视觉里程计(VO)
视觉里程计(VO,Visual Odometry)顾名思义是用视觉的方法,确定自己的位置,是一种相对定位法。基本思想是基于自动驾驶摄像头(单目、双目)传感器获取的连续图像信息,估算相邻时间点两幅图像的位移,测度运动物体的位置变化。而将位置变化累计起来,就可以推算物体的运动轨迹,从而找到物体的位置。这种通过测度相对位移来推算位置的思想和IMU类似。
视觉里程计测量,首先需要将相邻图像关联,通过对比图像的变化,计算相对位移。但直接匹配两幅图上的像素,算力代价太大,所以通常选择容易识别且比较稳定的点作为代表,比如物体的角点、边缘点等,来建立相邻两幅图的关系联系,这就是特征点法。再通过特征点在相邻图像的位移变化,计算出目标的相对运动。
类似视觉高清地图,视觉里程计也有光线条件要求高、算力要求大的问题。无论是特征点的提取、特征点匹配还是相对运动的计算,都要求有高精度图片和高算力的支持。
I 小结
真实场景自动驾驶,往往要面临信号弱、延时等问题,特别是在高架桥、隧道等复杂场景,更需要结合多种定位方法使用。自动驾驶大脑通过分析,选取出各种方法定位指向的概率最大的位置,作为最终定位结果。
推荐阅读
▼
▎本文来源:从0到1看科技,智车科技(IV_Technology)整理编辑,转载请注明来源。如有侵权请第一时间联系我们。
-
自动驾驶汽车在隧道、山区如何精准定位?2025-07-13 1468
-
自动驾驶汽车是如何准确定位的?2025-06-28 1580
-
GNSS中高精度定位定向模组M20助力自动驾驶车辆精准定位2023-08-24 1609
-
高精自动驾驶中的地图匹配定位技术2023-06-07 833
-
自动驾驶定位概述2023-06-02 705
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 2455
-
UWB定位可以用在自动驾驶吗2020-11-18 3685
-
UWB高精度定位在自动驾驶中的应用前景2020-10-26 2875
-
自动驾驶车辆如何定位?2019-07-24 6024
-
自动驾驶汽车的定位技术2019-05-09 3529
-
UWB主动定位系统在自动驾驶中的应用实践2018-12-14 3302
-
自动驾驶的到来2017-06-08 7461
-
细说关于自动驾驶那些事儿2017-05-15 7214
-
自动驾驶真的会来吗?2016-07-21 14565
全部0条评论

快来发表一下你的评论吧 !
