

软机器人的挑战:大驱动电压、高功耗
电子说
描述
青年学者赖盈至在过去 6 年,先后以访问研究生的身份进入斯坦福大学、佐治亚理工学院,分别师承了美国佐治亚理工学院教授、中国科学院外籍院士王中林及斯坦福大学化学工程学院院长鲍哲南,在两位科学家的指导下跨入柔性电子与摩擦纳米发电机(TENG,triboelectric nanogenerator)的研究领域。并将两位材料领域学者的研究领域进行了更深度的融合创新,进而开发出全球第一个具有自驱动(self powered)、主动感知的软机器人(soft robot)。
多年来在人造皮肤领域带领开创性研究的鲍哲南教授在有次采访中提到,如果以人的皮肤作为一个启发点出发,或许就能够开创出更高的创造力,而不是局限于现有电子器件的功能去思考,会从生物模拟的方式思考不同的可能性,进而产生一些平常想不到的做法。而赖盈至在接受 DeepTech 采访时也特别提到,“两位老师帮助我打开了传统的思维。”
基于上述“如果打破传统的框架,就有很多机会冒出来”的理念,以及在王中林院士的带领下,赖盈至等人利用摩擦纳米发电机,开发出全球第一个自驱动,且可主动式感知、响应外部刺激和内部运动的软机器人皮肤,实现自发电,不用电池就可感测触摸、压力、湿度,让软机器人的能力和应用范围,又往前迈了一步。
该研究成果《Actively Perceiving and Responsive Soft Robots Enabled by Self-Powered, Highly Extensible, and Highly Sensitive Triboelectric Proximity- and Pressure-Sensing Skins》先前已经发表在国际期刊 Advanced Materials 上。
此次,DeepTech 专访了这位青年科学家、“***中兴大学”材料科学与工程学系助理教授赖盈至,探讨自驱动电子皮肤的优势,以及后续可持续改善的方向。
图|美国佐治亚理工学院教授、中国科学院外籍院士王中林在 EmTech 大会担任演讲嘉宾(来源:DeepTech)
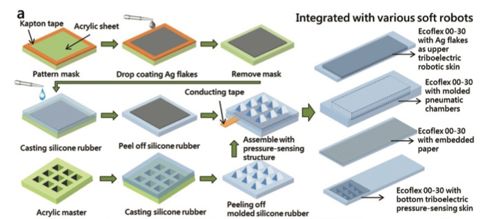
图|由摩擦皮肤和气动致动器(pneumatic actuator)组成的四层结构(来源:中兴大学)
软机器人的挑战:大驱动电压、高功耗
人类通过摄像头、传声器赋予了机器人视觉、听觉,近年随着机器学习相关算法的跃进,这两大领域已经有很大的进展及市场应用,机器人“触觉”则是许多科学家也想攻克的领域。在生物体中,皮肤是最大的器官,不仅具表面保护作用,还有优异的机械属性,如柔韧性、伸展性和顺应性,可以主动感知环境信息,包括触觉、压力、湿度等。全球许多研究团队投入开发类似皮肤的感官设备—电子皮肤,让机器能够更自然感受人和环境,并与其互动。
提到软机器人,大家最耳熟能详的例子莫过于迪斯尼动画里的“大白”,与刚性材料相比,由柔顺和可伸展材料制成的软机器人可提供更安全的应用,同时可变形的体态和类似肌肉的动作也较能适应不可预测的环境,运动的自由性相对较大,如果软机器人又具有了触觉,便进一步扩大了应用范围。
不过,要开发能够在软机器人上工作的类皮肤传感器(skin-like sensor)难度很高,包括材质的拉伸性、灵敏度,以及需要大的驱动电压,一般来说,柔性无源传感器,如电阻/电容/光学类型,需要连续预先设置大型驱动电压,通常为 1~10 V 或是由光信号驱动它们运行。
此外,传统传感器是通过电力进行驱动,机器人的体积通常不小,如果要在机器人身上大面积覆盖电子皮肤,每个传感器驱动电压,就会导致功率耗散高,再加上,现有的电子元件不适用于弯弯曲曲、体态变动的构造之上,因此,开发用于软机器人的关键感应装置,就必须找到其他技术来规避传统传感器的限制,摩擦发电就成了一帖解药。
摩擦起电效应(triboelectric effect)为一种自然现象,利用材料不同的电负性,当材料在与另一种材料接触后,变为带电的,在电介质表面上的摩擦电荷,通过驱动自由电子在外部电路的流动,进而产生电势(electric potential)。与无源传感器相比,摩擦皮肤的驱动能量来自摩擦起电效应,涉及接触电气化和静电感应的协作。
赖盈至表示,摩擦发电有两种应用方法,一种是发电源来自机械力,象是用手触摸、用手施加压力;另一种则是自然源,利用风、雨产生能量。
应用在电子皮肤上,当你触摸它时,会产生一个电力信号,但除了用作发电之外,他们研究的创新之处,在于将电力信号变为一个信号源,摩擦纳米发电机就变成了传感器,这个可自供电的摩擦皮肤(tribo-skin)能够感知外部刺激,象是碰触和压力,又具备很好的拉伸性,就算被剪破也能正常运作,同时实现了机器皮肤和软机器人于一身。
图|软机器人可以触诊,量测脉搏,模仿中医把脉(来源:中兴大学)
自供电传感器三大优点
摩擦发电传感器跟传统传感器有什么不同?赖盈至举例,智能手机要有触控功能,必须先提供触控面板模组电力,用户触摸后,原本的电力信号就会改变,系统就会知道有人触摸了它,但是使用 TENG 技术的传感器不需要事先提供电力,它自已会产生电力信号,也就是,一个可自供电的传感器。
试想一下,若要赋予机器人触觉,必须在全身或四肢铺满传感器,会使机器人更加耗电,因此,摩擦发电传感器的第一个优点是解决了供电问题。
另一个好处在于材料选择及形体运用灵活,TENG 传感器可以使用多种材料来制作,包括橡胶、硅胶、高分子、薄膜等,可以依照材料的特性做出可弯曲、可伸缩的型态,材料不受限,可应用性就宽广很多。
第三个优势在于成本,赖盈至指出,TENG 传感器不需使用半导体制程如热蒸镀金属,而是采用低温制程,成本会比传统的传感器便宜许多。
图|王中林(右)与赖盈至(左)(来源:赖盈至提供)
电子皮肤被剪破仍正常运作,触诊、摸尿布、爬行机器人都可行
根据发表在 Advanced Materials 上的论文,他们开发的摩擦皮肤将导电基质夹在弹性体(elastomers)之间,均匀铺覆在三角微棱镜(triangular-microprism)压感结构上,有很好的拉伸性(100% 拉伸应变性能),灵敏度也很高,低压敏感度为 0.29 kPa-1(9.54 V kPa-1,<5 kPa),并且最高检测限可达至 63 Pa。
具有最高电子亲和力的橡胶是很好的摩擦电负性材料。当物体与摩擦皮肤接触时,由于电负性的差异,电子从物体表面移动到橡胶表面。当物体离开时,两个带相反电荷的表面分离,产生电位差。橡胶表面上的未屏蔽负电荷驱动自由电子从嵌入的银片流到地面,并引起电极中正电荷的累积,从而产生电流和电压输出。
图|仅管电子皮肤被剪破,还是可以正常运作(来源:中兴大学)
摩擦皮肤可以整体集成到软气动致动器(pneumatic actuator)中,使软机器人能够执行各种主动感知和响应任务,像是机器抓手,可以感知物体的移动,例如距离物体多近,也能够控制举起、放下、或是抓取的力道,并意识到货物掉落,可以应用在工业机器人中的监视和反馈控制上。
另外,也能应用在机器手指上,感知温湿度、检测到细微的人类生理信号,例如他们就设计了一个机器人手指用以检测婴儿裤子的水分。或是与毛虫类机器人、蛇型机器人结合,将摩擦皮肤嵌入到机器人的腹部,当机器人在爬行时,就可感知其肌肉运动,可以执行特殊任务。
图:摩擦皮肤可以辨别接触物体的湿度,他们以触碰婴儿尿布作为示范(来源:中兴大学)
该软机器人可直接驱动光电元件,通过点亮 LED 灯做出反应,也可以进一步做成用声音、光线、短语等方式来应答人类,让人类与机器人之间的交互更直观。
图|可以驱动光电器件,进行人机交互(来源:中兴大学)
摩擦纳米发电机又一新研究:能量收集雨衣
除了上述的软机器人研究,不久前国际期刊 Advanced Science 刊载一篇文章《Waterproof-Fabric-Based Multifunctional Triboelectric Nanogenerator for Universally Harvesting Energy from Raindrops, Wind, and Human Motions and as Self-Powered Sensors》,阐述了磨擦纳米发电机技术除了通过机械运动(如身体运动),也能利用自然源(如雨、风)和来撷取动能的织物。
该研究同样是在王中林院士带领下,赖盈至等人示范了结合摩擦纳米发电机的智能布料,将其做成雨衣、雨伞、旗帜、衣物等,就可以撷取大自然风、雨,以及人体运动的能量。这样的技术可应用在物联网,尤其是偏远地区的物联网应用,“最好的方式让设备可以自给自足,不需替换它的电池”。
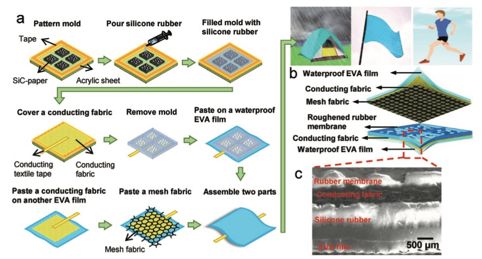
图|可收集风、雨能量的织物(来源:advancedsciencenews.com)
软机器人应用潜力看好,但仍有改善之处
赖盈至在 2013~2014 年以访问研究生的身份进入斯坦福大学化学工程系,在鲍哲南院士麾下学习纳米碳管、软性电子与电子皮肤,博士毕业之后,他看到王中林院士开发的摩擦纳米发电机技术是人类科技新时代的能源技术,心想如果能将两个技术结合可望克服软性电子与电子皮肤面临的挑战,因此他在博士毕业进入佐治亚理工学院材料系向王中林院士学习。
图|斯坦福大学化学工程系院长鲍哲南(右)与赖盈至(左)(来源:赖盈至提供)
“两位老师帮助我打开了传统的思维,”赖盈至说,“我们以前不会想到如果它可以发电,就可以拿来当传感器,有了这项技术,人类的电子与能源技术向前了一大步。如果你打破传统的框架,就有很多机会冒出来,这是我从两位老师身上学到的。”言谈中,赖盈至流露出对两位老师指导与带领的感谢,珍惜与两位院士的情谊。
在两位著名学者的启蒙下,现在担任教职的他也与团队致力利用新颖材料与新物理机制,开发纳米发电机、电子皮肤、软性电子元件、软性机械,赖盈至认为,主动感知、响应的软机器人可应用性很大,能察觉东西掉落,也可以控制力道,用以夹取一些容易损伤的东西,象是鸡蛋、水果,另外就是与人工智能相关算法结合,创造更多的应用。
不过,他也直言,该技术仍有持续改善的空间,比如目前他们开发的触诊软机器人,可以量人体脉搏、量环境温度,例如辨识冰水或热水,但用在量人体体温还不行,因为人体体温变化细微,还无法辨别很细微的差异。
另外,还有一个不足的地方,就是软机器人的操作系统是刚性的,“目前传感器是软的,机械本身也是软的,但是,操作系统依旧是硬的,如电路板、传输信号的电路、处理器等都是硬的”,但要让这些元件变柔性,挑战相当大,“这不是两三年就可以解决的问题,是很长期的目标”,不过赖盈至与团队已经投入研究,“希望有一天软机器人全部都是采用柔性的元件,达到极致。”
-
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块2025-01-04 2164
-
浅谈儿童陪护机器人2023-05-11 1072
-
电机驱动的扫地机器人介绍2022-11-09 2457
-
机器人是什么?2022-03-31 22117
-
如何应对机器人设计开发中的挑战?2019-07-31 2293
-
教育机器人方兴未艾,你了解多少?2018-12-20 4821
-
拆开工业机器人,让你见识机器人驱动系统中的电机种类2018-10-30 6810
-
工业机器人结构、驱动及技术指标详解2018-10-12 2479
-
小小班机器人创新挑战赛走进武汉2017-05-05 3136
-
游高铁机器人套件介绍-鸥鹏科技2016-04-01 4849
-
51版游高铁机器人2016-03-29 11277
-
乐高机器人中文教程——机器人入门2015-01-21 62652
-
中国传动网:小i机器人现身软洽会,智能机器人来了!2014-04-22 5559
全部0条评论

快来发表一下你的评论吧 !
