

光电传感器对智能车的控制设计
MEMS/传感技术
描述
引言
本文是根据第三届全国大学生“飞思卡尔”杯智能汽车大赛要求设计自主识别道路的智能车。整个系统采用了组委会提供的16位单片机mc9s12dg128为核心,模型车本身带有差速器和后轮驱动,需要设计完成基于单片机的自动控制系统使得模型车在封闭的跑道上自主循线运行。
车模与控制器构成一个自动控制系统,如图1,系统硬件以单片机为核心,配有传感器、执行机构以及它们的驱动电路,而信息处理与控制算法由单片机软件完成[1]。系统设计要求单片机把路径的迅速判断、相应的转向伺服电机控制以及直流驱动电机的控制精密的结合在一起。

智能车的设计是在保证模型车可靠运行的前提下,以电路设计简洁、车体灵活性高为原则。设计的两大重点,一是光电传感器的布局和电路设计,一是循线控制算法的设计。
本文第二节主要介绍了光电传感器的电路设计和布局,这是信号采集的关键,相当于智能车的“眼睛”;第三节主要介绍了循线控制算法,这是控制的核心,相当于智能车的“头脑”;最后在第四节对智能车的硬件、软件设计及实验情况进行了大体说明。
光电传感器
光电传感器的选择及电路设计
光电传感器位于智能车的最前方,起到预先判断路径的作用。其发射的光对白色和黑色有不同的反射率,因此能得到不同的电压值,采进单片机后通过一定的算法比较电压来判断黑线的位置,从而控制舵机的转动。这种方法易于实现,响应速度快,实时性好,成本低。
本文选用性价比基本适合的反射式红外传感器tcrt5000。红外光电传感器电路的设计形式多种多样,由于本文算法中采用的是传感器阵列经验判断方法,为了控制简便采用数字量输出传感器电路,如图2所示。
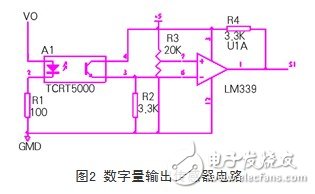
光电管采用脉冲调制式发光,即vo是震荡电路产生的脉冲电压,这样易滤除外界干扰。虽然电路相对复杂,但足以保证模型车的稳定行驶[3]。
光电传感器布局的研究
光电管阵列的布局直接影响智能车的循线效果。一般来说,典型的布局有“一”字形布局和“w”形布局两种。
所谓“一”字形布局,就是把多个传感器按照“一”字排开。这种传感器布局方式最常见,算法在理论上易于实现。其不足之处在于:对赛道的曲率几乎没有任何预测功能。因此一般不采用这种布局。
而“w”形布局,是把多个传感器按照“w”形排列。“w”形布局由于传感器分布在两排,使得智能车对弯道有一定的预测功能,这种预测功能特别体现在直道进入弯道时刻。后一排传感器仍在直道时,前一排传感器已经进入弯道。而不足之处是增加了控制算法的复杂程度,判断舵机的旋转方向时,往往需要上一次的检测数据。经验判断的可能性也随着传感器数量的增加而增加。
光电传感器布局仿真
经多次仿真实验,最终确定了传感器的布局和数量。采用如图3所示的“w”形布局,一共有13个传感器,前排8个,后排5个,前后两排间距为3.5cm。设置这个间距,使其对赛道有一定预测功能。具体的布局及仿真效果如图4所示。

循线控制算法
本文采用经验反馈控制,即在普通经验控制的基础上,加入pid控制的思想,引入比例、积分、微分三个控制常数,实施反馈,并采用积分分离的控制方法。
循线控制算法是利用前后两排传感器综合检测信号来推理得到模型车的精确转向及具体的车速。方向判断的方法是:如图3,首先判断下排5个传感器的情况,假设s3处在黑线位置,再观察上排8个传感器,此时s3将上排传感器分为左右两边,由于相邻两个传感器间距离稍大于黑线宽度,因此任何时刻只能有2个传感器同时检测到黑线,这样一来根据分析上下两排传感器信号就可以基本判断出模型车的转向情况。例如,某一时刻s3和s8检测到黑线,就可大致判断模型车应向右拐,并根据两个传感器的连线和竖直方向的夹角可判断舵机的转向和大致角度。
但同时还应注意,当车模进入左侧弯道时,也可能出现s3和s8共同检测到黑线的情况,这种情况下就要检查上一时刻的传感器信号,就是检测s4||s13的情况,若s4||s13结果为1,则认为车模应左拐,若s4||s13结果为0则应右拐。一次方向判断的流程如图5所示。

在程序中建立两个数组,一个存储每次检测到的信号,另一个存储实施控制后的当前信号作为历史数据。加入这种带历史纪录判断的思想后,使得控制更为精确[4]。
除了以上判断法则之外,还有两种情况需要考虑。即只有一个传感器检测到黑线的情况以及交叉赛道的情况。对于只有一个传感器检测到黑线的情况,同样需要检查上一时刻的传感器信号,例如,某一时刻只有s6检测到黑线,若上一时刻s5检测到黑线,则车模左转,若上一时刻s7检测到黑线,则车模右转。
对于交叉赛道的情况,则利用一种“滤波”的思想将其“滤”除掉。遇到交叉赛道时,必然会出现同一排几个传感器同时检测到黑线的情况,此时就给模型车一个命令使其直线前进,将交叉赛道排除掉。
这就是本系统基于经验逻辑判断的循线控制算法,在此基础上通过不断实验调整各个参数可达到较好的控制效果。
实验结果
硬件设计
电机驱动电路
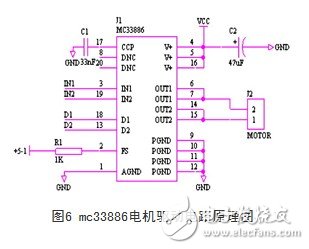
电机驱动采用mc33886作为驱动芯片,其原理如图6所示。通过向in1、in2口送出pwm波来控制电机的正转和反转,正转为智能车加速,反转减速。改变pwm波的占空比,可控制电机的转动速率[5]。
速度检测电路
本文采用增量式光电编码器来测量车速,其输出脉冲的频率正比于转速,可以通过测量单位周期内脉冲个数或者脉冲周期得到脉冲的频率,具有较高的精度。
电源变换电路
智能车系统配有7.2v的蓄电池,可直接为直流电机供电。单片机、光电传感器和光电编码器所需电压为5v,伺服舵机为6v。这些电压则由7.2v蓄电池调节得来。
单片机和光电编码器通过稳压芯片7805稳压输出5v电压供电。光电传感器数目多、功耗大,对电源稳定性要求更高,故单独采用效率较高的芯片lm2575对它供电。给舵机供电的芯片选用的是低压差可调输出三端线性稳压器lm1117,片上提供安全操作保护等功能。
软件设计
软件设计分模块实现,其中主程序包括时钟初始化、i/o口初始化、舵机电机初始化、采集信号和控制算法,程序流程见图7。

实验结果及其分析
程序开发过程中完全采用了组委会提供的s12核心开发板,它是由mc9s12dg128单片机构成的最小系统。mc9s12dg128属于hcs12系列单片机,是motorola推出的高性能16位微控制器。它能够提供32-512kb的第三代快闪嵌入式存储器,总线速度可达50mhz,外围时钟可达25
mhz。还具备编码效益、片上纠错能力,并与mc68hc11和mc68hc12结构编码向上兼容。mc9s12dg128单片机具有112个引脚,其中与cpu相关的引脚都是兼容的。
s12开发板上有构成最小系统的复位电路、晶体振荡器及时钟电路,串行接口的rs-232驱动电路,+5v电源插座。单片机中已经写入了开发的监控程序。8个小灯用于调试应用系统。单片机的所有i/o端口都通过两个64芯的欧式插头引出。
硬件调试时,分别对各模块功能进行测试,重点调节光电传感器,它感知黑白线时输出信号应不同,感知白线时经过比较器输出为低电平,感知黑线时输出为高电平。软件调试时,可利用bdm开发工具,显示单片机运行时其内部存储器中的数据。
通过硬件软件的联合调试和实验,出现了一些问题,但通过对程序的完善和车模的重新装配后效果大大改善。最终车模可在跑道上循线运行,但仍存在功耗较大,转向延时等问题。
结语
本文基于自动控制原理,利用探路模块的道路偏差信号使智能车实现寻迹跟踪,利用pwm技术控制电机的转速和舵机的转向。
本文重点介绍了光电传感器的排布“w”形布局以及循线控制算法,它们是保证智能车循线运行的关键。“w”形布局使智能车具备了道路预测能力,而循线控制算法使得车体转向快速正确。
通过对智能车仿真和实验表明,整个系统的方案可行,系统的控制策略和软硬件基本合理。控制方面,虽然经典的pid控制在电机调速方面有良好的控制效果,但由于车模的动力学模型因车况不同而变化等原因,使得pid控制效果受到影响,以后可考虑采用模糊控制,使算法更加智能化,系统的适应性更强。
-
光电传感器对智能车的控制设计方案2020-08-05 1896
-
光电传感器中发射器与接收器如何进行匹配2020-04-22 3728
-
智能车光电传感器布局对路径识别有哪些影响详细资料研究2019-06-26 1206
-
基于红外传感技术的STM32智能车2019-02-28 2977
-
基于光电传感器的能自主识别道路的智能车2018-11-05 2285
-
光电传感器怎么调节_光电传感器使用方法2018-03-06 73999
-
基于光电传感器的智能车控制的系统解析2017-11-22 1044
-
基于红外线光电传感器寻迹的智能车系统设计方法2017-09-07 814
-
采用光电传感器的智能车控制研究2012-08-18 2461
-
飞思卡尔智能车控制系统设计2011-07-06 1130
-
光电传感器,光电传感器是什么意思2010-03-03 5870
-
光电传感器,光电传感器原理2010-03-02 2286
-
基于光电传感器的路径检测试验2009-08-01 864
全部0条评论

快来发表一下你的评论吧 !
