

“AVP-乘用车L4级别自动驾驶的必经之路” 的演讲
描述
2018年12月26日,纵目科技宣布收到中国一汽的项目定点通知书,将在中国一汽红旗品牌2020年的量产车型上,部署低速L4级自动代客泊车产品,并计划在2020年实现主要一线二线城市大型商业停车场内的自主泊车功能。纵目成为中国首个拿下整车厂自动代客泊车量产项目的公司。
在2019年1月结束的底特律智能汽车展上,纵目科技进一步联合长安汽车,共同宣布在低速自动驾驶和出行服务领域达成战略合作,围绕自主泊车和共享出行云服务平台共同开发相应技术及整体解决方案,实现自主泊车由技术实现到量产落地。
2019第四届ADAS与自动驾驶论坛于3月21-22日在上海召开,论坛由CCIA智能网联专委会与佐思产研主办,地平线、纵目科技、中科慧眼、中电昆辰、富兰光学、创景科技等单位支持。
纵目科技市场总监葛俊钦在论坛上发表了题为“AVP-乘用车L4级别自动驾驶的必经之路” 的演讲。以下是演讲全文。
纵目科技于2017年10月第一次发布了代客泊车系统,是国内比较早的呈现L4级别泊车系统的公司。纵目科技一直比较关注低速场景, L4比较好的落地场景是AVP。我们有一个场端的管控系统,包括云端系统,从使用体验、服务、安全上,提高了AVP的附加值。投入最多的是车端和云平台。纵目认为不管是高速、低速,其实都涉及到车端、云端的管控,只有在这样的情形下,车企包括未来出行的企业,才会觉得这样的L4应用是在安全层面上,是可以被接受的。
整个过程投入是巨大的,逐步支持少数停车场到多数停车场,AVP速度从低速慢慢升高,从基础功能逐步加入一些城市化道路支持,一层一层演进,逐步提高用户的使用体验。
最近麦肯锡有一个关于怎么推动自动驾驶落地的一张图表,大概分了以下几个阶段。随着地理围栏的逐步打开,场景的逐步扩散,可以看到从一些封闭的高速环境,到全场景的覆盖可能还需要十年以上的时间。麦肯锡认为2023年在低速和城镇道路的自动驾驶会先期落地。
来源:麦肯锡
越来越多的迹象表明,L4在其他的场景落地还需要很长的时间,但是在低速有一些大规模商业化落地的场景。这是为什么目前有那么多做AVP的公司。
2027年这个时间点会是颠覆性的,在2027年-2032年之间,整个移动出行会达到万亿美金级别的市场。传统出行将占不到50%的份额。纵目认为AVP是未来出行的最小子集,所以坚定的把资源投入在泊车的细分领域上。
自动驾驶商业化落地面临诸多挑战。除了产品技术本身之外,还要解决在地下停车场定位、建图、车身控制决策等问题。这对主机厂来说,成本会有比较显著的提高,因为不管是传感器、控制单元,都需要有足够多的覆盖面,这个成本是增加的。
通过对上海陆家嘴工作人群做的调查,他们愿意支付30元的AVP费用。其实不同城市、不同地区,停车难度不一样,所以支付的时间成本等都不一样。就陆家嘴来讲,产品运营这块该收取多少费用?场端收多少费用?包括云端的监控、保险、主机厂,也仍然在探索中。这个商业模式,因为纵目可以参与AVP的时间比较早,投入也比较坚定,目前在和主机厂及上下游的合作伙伴积极探索及推进AVP做为一个服务的商业化探索和落地。
那么,究竟什么叫真正的商业化?从纵目的观点来看,如果实现L4级别的商业化,需要满足两个条件:第一,需要足够大的量(比如出货大于10万台)。第二,覆盖的地域要足够广。第三就是产品的服务模式通过市场的检验得到客户的认可,就是愿意为AVP买单。
如果一个技术要得到大规模的商业化,有三个关键词:成本、质量和供应链。现在非常多新兴企业进入,但是和主机厂打交道,要考虑成本,要控制质量,看PPM。所以现在已经进入比较痛苦的阶段,要落地,需要大量传统行业的经验,去把生产线之类的事情做好,而不只是AI本身。所以纵目和很多新兴企业的区别在于,纵目更多强调是车+AI,优先从车的角度,从量产的角度去考虑。
L4难不难?L4很难,非常难。在这里没有机会谈得很细,这里面有很多问题,包括怎么保证系统做到ASIL-D,怎么设计及确认ODD,基于传感器的感知系统怎么避免事故发生?虽然在用多传感器融合,甚至有的项目用到激光雷达,怎么在足够多的数据源上,保证AVP系统的实现和安全?所以需要非常多的数据积累和测试验证。
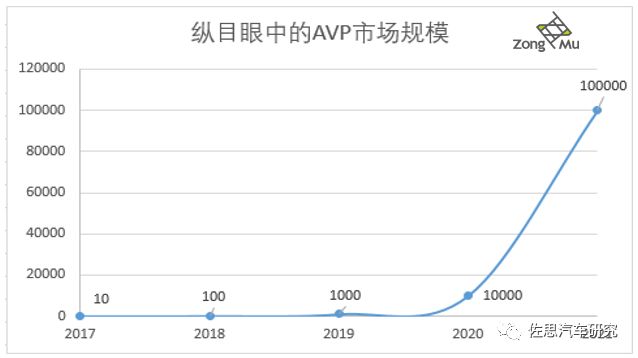
AVP市场基本从2018年开始。纵目自2017年首次发布AVP之后接触了很多客户,友商也不断在给国内主机厂做试点,基本上量是一百台左右(纵目做了几十台,友商做了几十台)。纵目判断这个量将呈指数级的增长,因为从2019年开始,已经有一些运营的实践,即AVP在共享出行中应用。我们预计2020年AVP运营车辆将达到1万辆,发展速度会非常快。
AVP在共享出行中的应用可以叫“召之即来,挥之即去”。说起来比较简单,但是需要详细的设计场景,包括怎样对停车场做认证。停车场需要建图,不管是静态地图或者动态地图,还有停车场里面怎样建设,这都是一个完整的生态,并不是产品本身。共享出行有专门的停车区域,这里面可以做车辆管理,可以更好控制它的空间,包括更好地进行充电、洗车管理等。
纵目自2013年开始做环视系统,后来做ADAS、APA、AVP,保持了核心技术在产品上的延续性。通过这样的验证过程,取得主机厂等客户的信任,然后扩大团队,加强技术实力。现在发现很多单独做高级别自动驾驶的企业,又回到行业里面和主机厂进行更深入的,甚至L1、L2的合作,这其实是必需的过程。
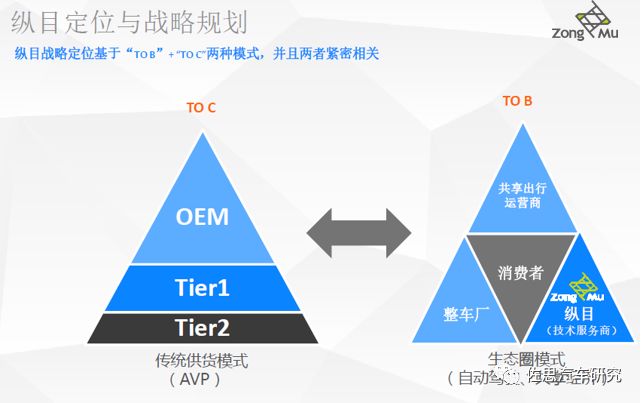
谈到纵目的定位,从原来的部件供应商,到AVP系统供应商,现在和大量上下游供应商合作,致力于成为智慧出行的整体服务商。同时,在战略上基于ToB 和ToC 两种模式发展。一个是传统的针对OEM的金字塔型结构,根据主机厂的定义开发产品;另一个是与出行服务商、主机厂一起讨论产品定义,结合出行技术共同打造更好的服务。
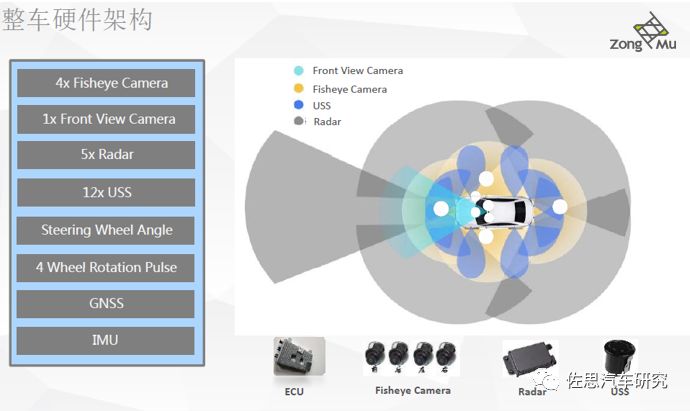
目前AVP的车端架构基本上是行业里通用的架构,有一些方案上会加激光雷达。传统泊车方案配置12个超声波雷达和4个环视摄像头。而AVP在环境感知上需要做到更安全,需要前视感知和四个角雷达的感知,结合泊车系统做融合。传感器对于主机厂没有成本增加,只是在算力平台上做升级,从原有的ADAS处理器平台升级成现在自动驾驶处理器的平台。
在技术方面,纵目有自己全栈的技术方案,包括算法。
关于机器视觉能力,现在非常多的企业在提。纵目一直在积极投入,专利数量位列科技企业前列,目前申请记录134项,授权31项。纵目Freespace检测算法,在KITTI数据集的单项排名第一。
做AVP,地图是一件不得不自己做的事情,因为场端地图相关的服务商不是很多。纵目开发了全栈的地图技术,手机端、场端、云端都可以用。因为纵目没有资质去做采图、建图,所以会和图商合作。
纵目在车端AVP产品上在进行一个完整的开发量产过程(ISO26262,IATF16949,SOTIF等等);在场端和智慧停车厂商合作,在云端、手机端也在积极开发。所以整个AVP系统的实现并不容易,但AVP场景会是L4在中国甚至世界范围内最先落地的一个场景。并且我们认为,AVP是未来自动驾驶实现过程中的一个最小子集,基于AVP的延伸扩展的产品会随着未来出行行业的发展一路向前。
-
妥妥的L4级别:北汽百度无人车“抢鲜”上路2016-11-21 1050
-
L4级别自动驾驶卡车,其核心竞争力又有多少呢?技术又从哪里来?2018-05-03 6631
-
L3级别自动驾驶车型量产,L4还有多远呢?2018-10-09 18684
-
百度携手一汽推出中国首款L4级自动驾驶乘用车2018-11-07 4958
-
从三个级别解读自动驾驶公司 乘用车L4级别资金规模达百亿美金2019-01-07 2719
-
在L4级别自动驾驶之前 保留方向盘和踏板的趋势非常明显2019-04-30 1298
-
百度实现L4级自动驾驶自主泊车场景2019-07-29 1844
-
蔚来为什么选择Mobileye合作L4级别自动驾驶2019-11-07 1414
-
蔚来联手Mobileye 共同打造L4级别自动驾驶车型2019-11-25 883
-
预计2025年,北汽将实现L4级自动驾驶产品量产2020-11-13 1359
-
福瑞泰克计划明年在杭州运营L4级自动驾驶小巴2020-11-16 2576
-
L4级别自动驾驶初创公司文远知行WeRide宣布完成B1轮融资2020-12-24 1559
-
文远知行与联想车计算共同推出L4级别自动驾驶解决方案2024-03-20 1235
-
经纬恒润全冗余R-EPS助力L4级自动驾驶落地2024-09-24 1836
-
l4级别自动驾驶的特点是什么2024-10-22 3423
全部0条评论

快来发表一下你的评论吧 !
