

使用嵌入式 Linux 进行实时系统开发
嵌入式技术
描述
对于实时、决策或者低延时应用,Linux能够提供多种方案。第一种方法是和 Linux 内核一起运行一个 hypervisor或者co-kernel。这种方案中hypervisor或者co-kernel的优先级高于 Linux,实时任务则运行于其中。另外一种方式是使用非对称异构多核系统,Linux和另外一个实时内核分别运行在不同处理器内核上。最后,还可使 Linux 更具抢占性从而提高其实时性能。这通常可以通过 PREEMPT_RT 补丁实现。
实时系统的实时能力,并不表示其能够达到很高的处理速度。实时能力是指系统能够在规定的时间内完成响应,这个时间可以是微秒、毫秒甚至是秒级。越小的时间范围对于系统的软件和硬件要求也会更高。本文我们使用 Toradex 计算机模块上通过三种不同的方法实嵌入式实时Linux方案。我们对于实时性能的测试方法如下
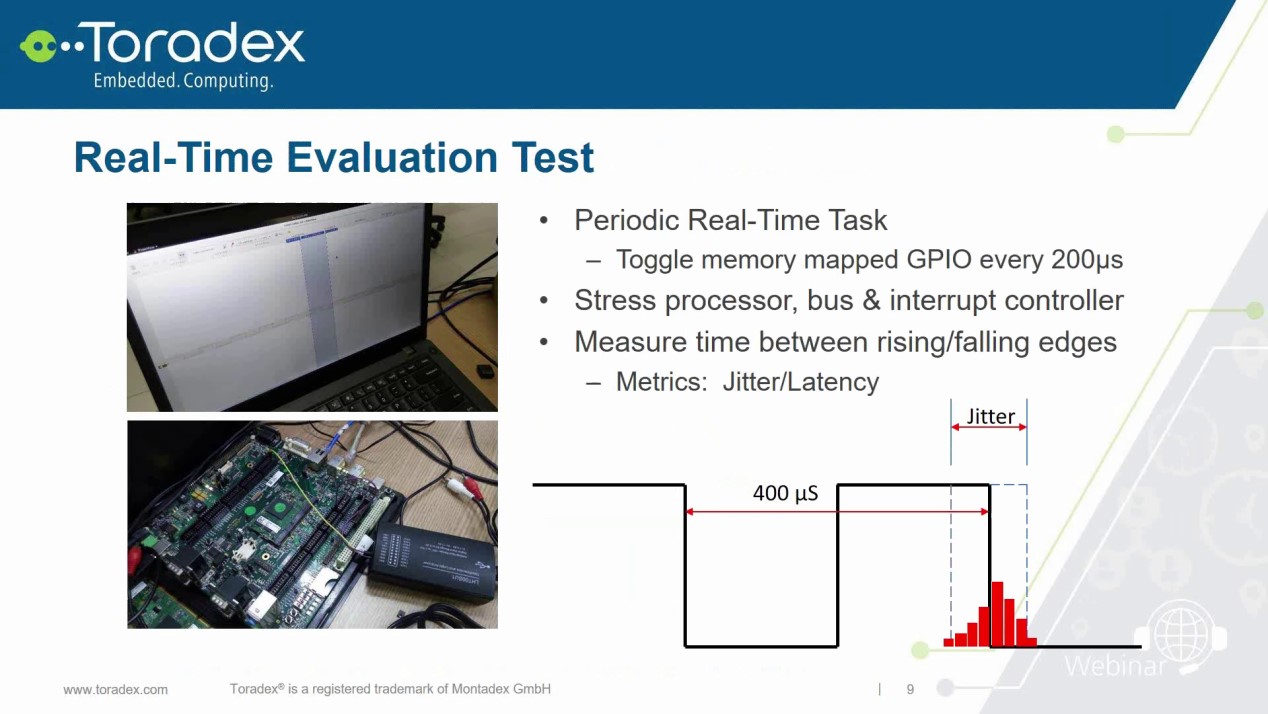
以 200us 为单位,翻转一个 GPIO,并测试信号在翻转时候的抖动。下面是具体测试情况:
1). 普通Linux
模块:Colibri iMX6
Linux:3.14.52,CONFIG_PREEMPT_VOLUNTARY=y
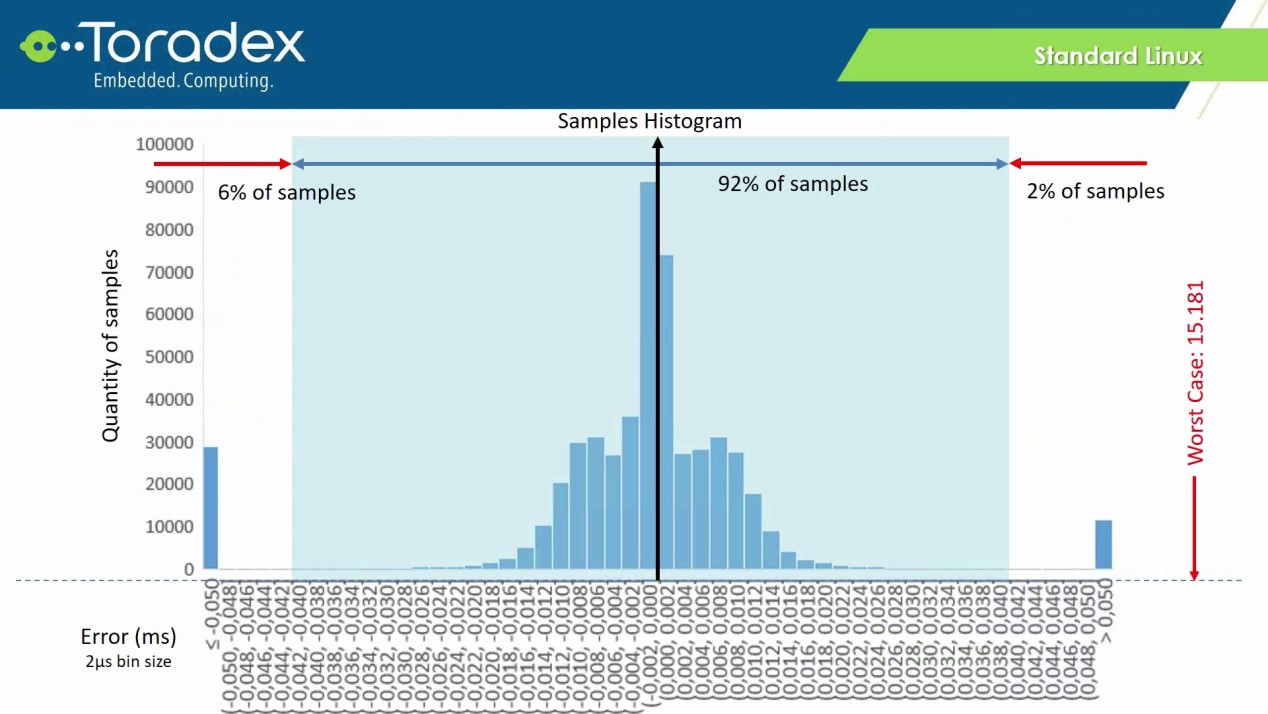
图中可以看到抖动分布的情况。92%的翻转抖动在40us以内,最糟糕的情况是超过15ms的延时。普通的 Linux很难保证每次任务都在规定的时间内完成,即使我们把响应时间上线放宽到10ms。
2). Real-time Linux – PREEMPT_RT
模块:Colibri iMX6
Linux:3.14.52,PREEMPT_RT_FULL
PREEMPT_RT patch: https://www.kernel.org/pub/linux/kernel/projects/rt/
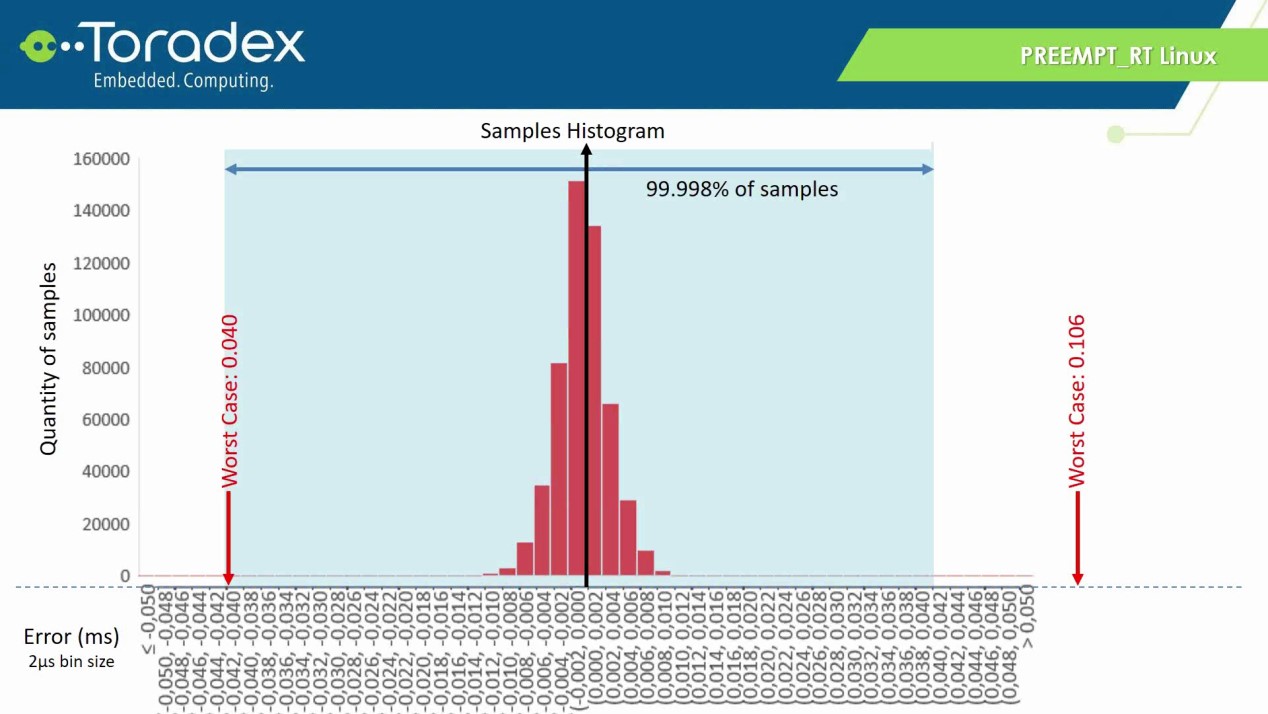
在使用 PREEMPT_RT 补丁后,几乎所有的任务都在 40us.相比于普通 Linux,抖动分布更加集中在10 us以内,并且最大的延时为106us。
3). Real-time Linux – Xenomai
模块:Colibri iMX6
Linux:3.14.52,Xenomai
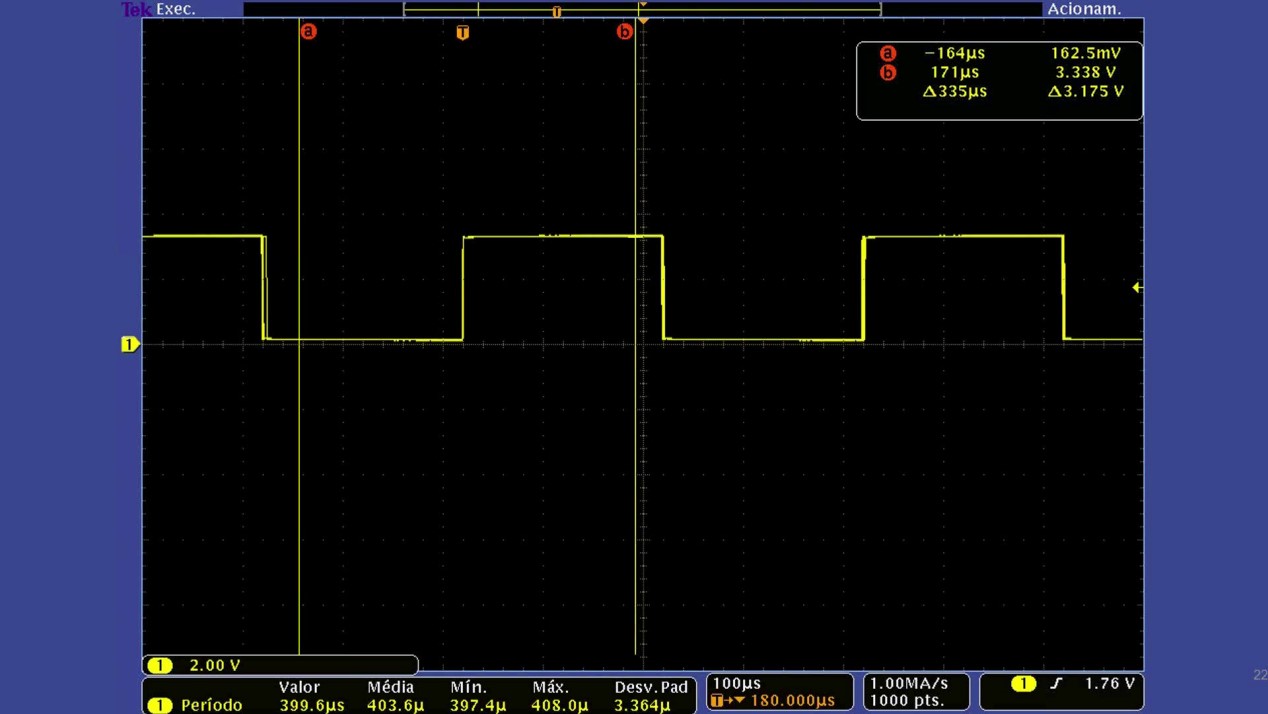
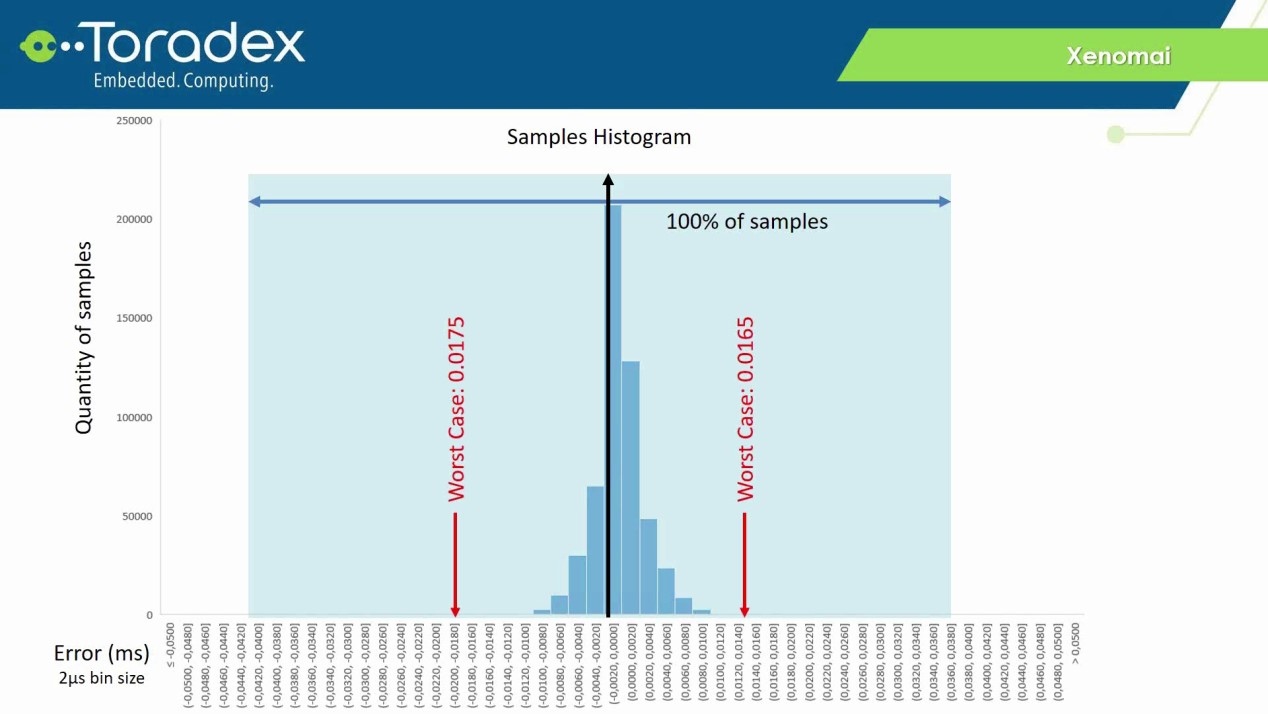
Xenomai 通过 co-kernel 的方式提供高于 Linux 内核优先级运行任务。同 PREEMPT_RT有相近的实时性能表现,但最大的延时为17.5us。
4). iMX7 – HMP 异构多核处理
模块:Colibri iMX7
Linux:4.1.15 on Cortex-A7
FreeRTOS: v8.0.0 on Cortex-M4
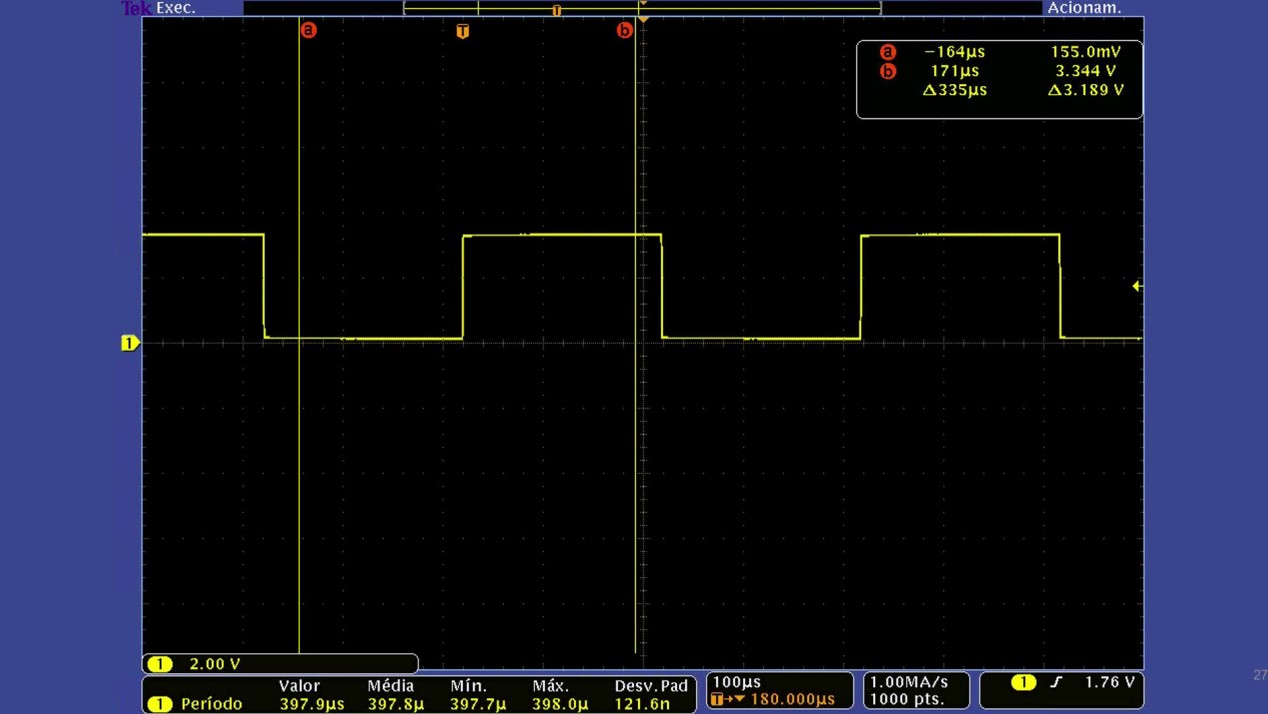
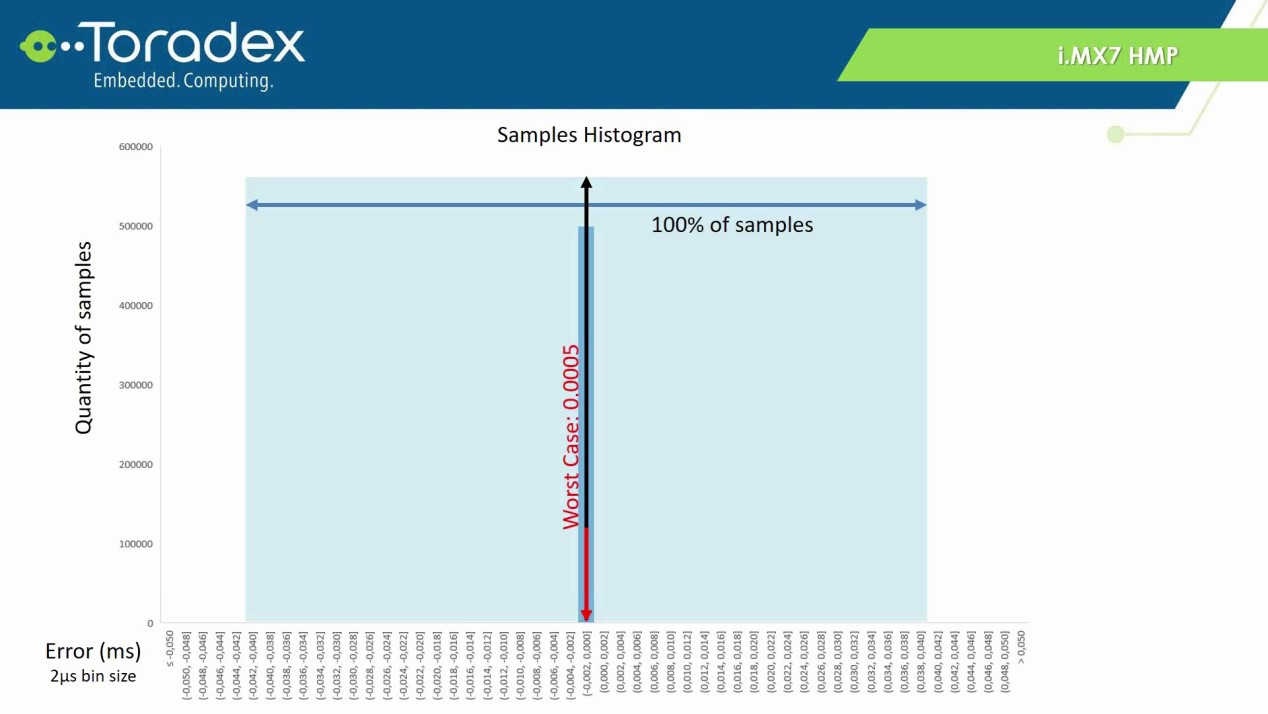
Colibri iMX7 在同一个处理器上集成了 Cortex-A7 和 Cortex-M4 内核,Cortex-A7 上可以运行 Linux 等复杂、多任务操作系统,而 Cortex-M4 则能运行 FreeRTOS 等实时操作系统,甚至是直接运行应用程序。由于实时任务和Linux 分别运行在独立的处理器内核上,所以两者之间不会产生 CPU 资源竞争,保证 M4 内核上任务的独占性。从上面测试的结果可以看到,信号翻转几乎都在 200us 的时间点上完成,最大的抖动是0.5us。
从上面的测试中可以看到,普通的Linux内核很难保证任务的实时性,即在规定时间内完成响应。通过内核补丁,或者像Xenomai一样,引入高优先级的co-kernel,都可以很大程度上改善Linux的实时性。用户可以在不改变硬件平台的情况下实现实时应用。基于软件方式实现的实时Linux,意味着部分Linux内核API发生了变化。为了保证整个任务的实时性,用户可能需要修改部分外设驱动代码,例如CAN驱动。因为默认的外设驱动并不是针对实时Linux内核。Colibri iMX7通过硬件的方式,通过不同的处理器内核分离非实时和实时任务。
Cortex-A7 采用普通的Linux内核,兼容所有的外设驱动,用户能够利用Linux系统丰富的开发资源。而实时任务由Cortex-M4完成,目前FreeRTOS所支持的外设驱动包括ADC、GPIO、I2C、UART、WDOG、SPI、CAN。Linux和FreeRTOS之间通过 rpmsg协议进行通信。
-
嵌入式Linux系统开发产品分类2021-11-04 1433
-
嵌入式系统设计--课堂总结(嵌入式Linux系统开发)2021-11-02 1712
-
(网盘)ARM嵌入式Linux系统开发详解2021-08-04 1869
-
Linux+嵌入式实时操作系统开发与应用2021-07-30 1486
-
嵌入式系统和实时系统开发的关键工艺是什么?2019-08-23 1581
-
嵌入式系统和实时系统开发的关键工艺2019-07-11 1659
-
嵌入式Linux系统开发教程及案例分析2018-06-05 1395
-
ARM嵌入式Linux系统开发详解PPT2016-08-09 817
-
ARM嵌入式Linux系统开发详解2016-03-17 901
-
Linux嵌入式实时操作系统开发与设计2012-08-04 4819
-
Linux嵌入式实时操作系统开发与设计教程2010-03-01 609
-
嵌入式Linux系统开发基础2008-09-10 754
-
Linux嵌入式系统开发平台选型探讨2006-03-11 1130
全部0条评论

快来发表一下你的评论吧 !
