

六轴机器人的结构图
电子说
1.4w人已加入
描述
六轴机器人的结构图
六个伺服电机直接通过谐波减速器、同步带轮等驱动六个关节轴的旋转,注意观察一、二、三、四轴的结构,关节一至关节四的驱动电机为空心结构,关节机器人的驱动电机采用空心轴结构应该不常见,空心轴结构的电机一般较大。
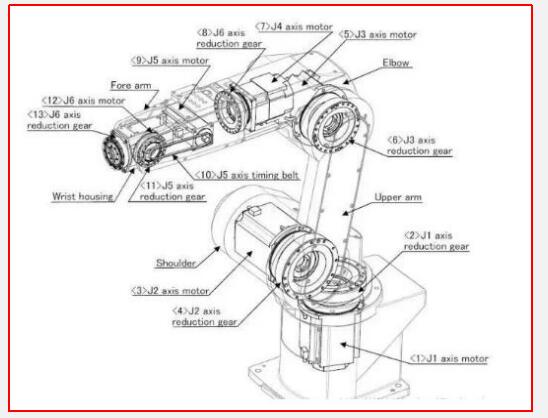
采用空心轴电机的优点是:机器人各种控制管线可以从电机中心直接穿过,无论关节轴怎么旋转,管线不会随着旋转,即使旋转,管线由于布置在旋转轴线上,所以具有最小的旋转半径。
此种结构较好的解决了工业机器人的管线布局问题。对于工业机器人的机械结构设计来说,管线布局是难点之一,怎样合理的在狭小的机械臂空间中布置各种管线(六个电机的驱动线、编码器线、刹车线、气管、电磁阀控制线、传感器线等),使其不受关节轴旋转的影响,是一个值得深入考虑的问题。
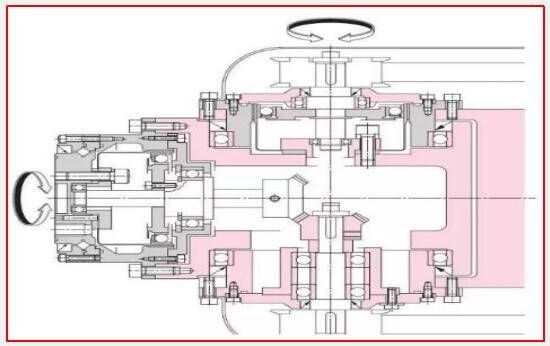
常见的机器人腕部结构如图2~图4所示,在这三种手腕部的结构中,以第一种(RBR型)结构应用最为广泛,它适应于各种工作场合,后两种结构应用范围相对较窄,比如说3R型的手腕结构主要应用在喷涂行业等。

六轴关节机器人的腕部关节设计较为复杂,因为在腕部同时集成了三种运动。小型的六轴关节机器人的腕部关节主要采用谐波减速器。图4较为详细地描述了常见的六轴关节机器人的腕部结构,其腕部关节用到了两个谐波减速器,两个同步齿型带传动输入,中间还用到了一对锥齿轮副传动。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
LabVIEW的六轴工业机器人运动控制系统2023-12-21 3855
-
stm32红外六足机器人2014-03-27 10233
-
工业机器人的基本结构2015-01-19 9229
-
六轴工业机器人的主要特点2017-08-08 6528
-
多轴机器人的发展趋势2020-07-29 7361
-
滚齿机的结构图2009-03-18 7997
-
微型四轴PCB结构图2016-06-03 969
-
大族机器人-六轴机器人2016-12-25 1390
-
自控控制:结构图2016-12-30 1604
-
如何判断六轴机器人厂家好坏?2019-03-19 694
-
六轴机器人如何选购?六轴机器人的选购技巧2019-03-21 1353
-
六轴机器人如何选购?2019-03-25 1155
-
六轴机器人之弧焊机器人功能包2020-03-18 1840
-
四轴机器人与六轴机器人的区别2021-08-26 15210
-
单轴机器人的结构与特点2023-07-14 2019
全部0条评论

快来发表一下你的评论吧 !
