

六轴机器人是哪六个轴
电子说
1.4w人已加入
描述
六轴机器人是哪六个轴
工业机器人在生产中,一般需要配备除了自身性能特点的外围设备,如转动工件的回转台,移动工件的移动台等。这些外围设备的运动和位置控制都需要与工业机器人相配合并要求相应精度。通常机器人运动轴按其功能可划分为机器人轴、基座轴和工装轴,基座轴和工装轴统称外部轴。
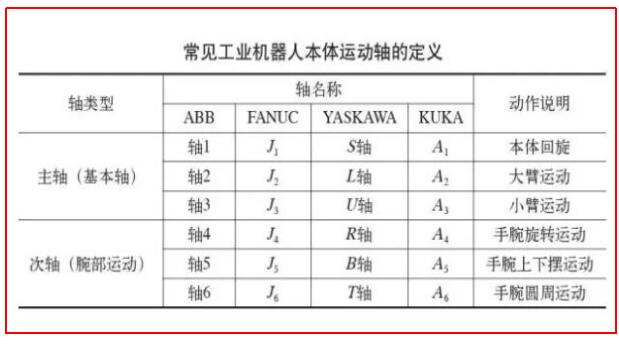
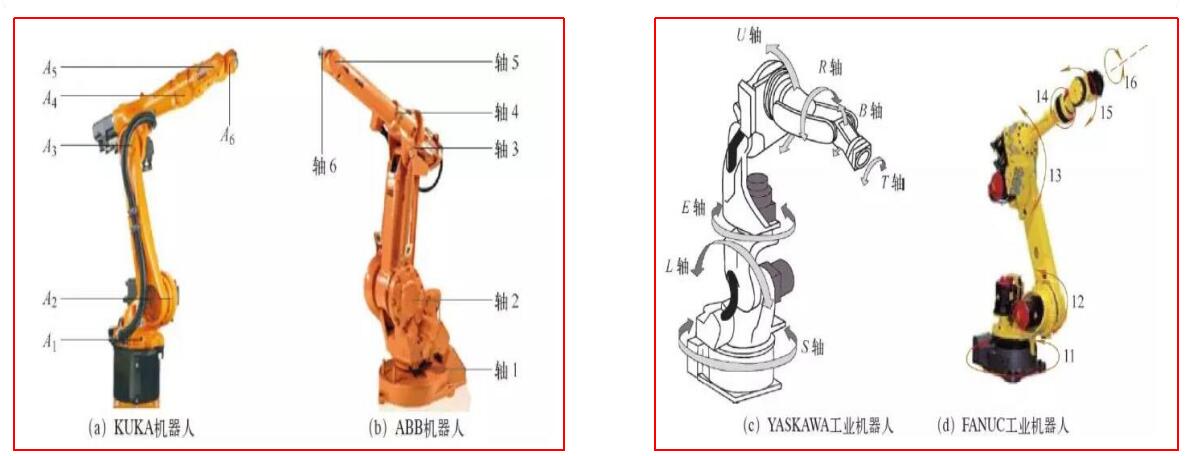
在实际生产中常用的是6关节工业机器人,该操作机有6个可活动的关节(轴),不同的工业机器人本体运动轴的定义也不同。用于保证末端执行器达到工作空间任意位置的轴称为基本轴或主轴;用于实现末端执行器任意空间姿态的轴,称为腕部轴或次轴。
六轴的作用
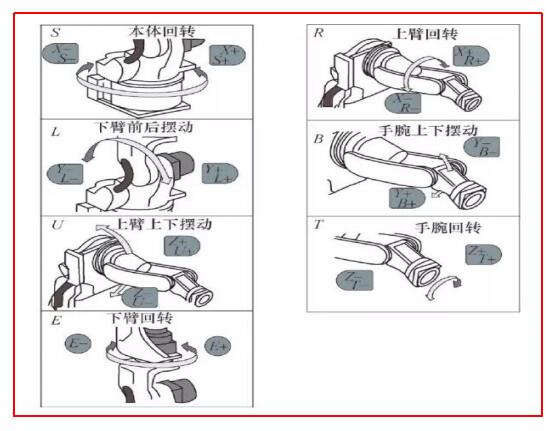
第一轴:第一轴是链接底盘的位置,也是承重和核心位置,它承载着整个机器人的重量和机器人左右水平的大幅度摆动。
第二轴:控制机器人前后摆动、伸缩的重要一轴。
第三轴:三轴也是控制机器人前后摆动的一轴,不过摆动幅度比第二轴要小很多,不过这也是六轴机器人臂展长的根据。
第四轴:四轴是控制上臂部分180°自由旋转的一轴,相当于人的小臂。
第五轴:第五轴很重要,当你差不多调好位置后,你得精准定位到产品上,就要用到第五轴,相当于人手腕部分。
第六轴:当您将第五轴定位到产品上之后,需要一些微小的改动,就需要用到第六轴,第六轴相当于可以水平360°旋转的一个转盘。可以更精确定位到产品。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 六轴机器人
-
焊接机器人六个轴分别是什么作用2024-11-21 1929
-
LabVIEW的六轴工业机器人运动控制系统2023-12-21 3855
-
四轴机器人与六轴机器人的区别2021-08-26 15210
-
7家六轴机器人厂商的技术交锋2020-12-31 5544
-
六轴机器人之弧焊机器人功能包2020-03-18 1840
-
关于工业机器人的六个轴指的是什么2019-09-10 29551
-
六轴机器人的结构图2019-04-02 34434
-
六轴机器人如何选购?2019-03-25 1155
-
六轴机器人如何选购?六轴机器人的选购技巧2019-03-21 1353
-
如何判断六轴机器人厂家好坏?2019-03-19 694
-
六轴工业机器人的主要特点2017-08-08 6528
-
大族机器人-六轴机器人2016-12-25 1390
-
stm32红外六足机器人2014-03-27 10233
全部0条评论

快来发表一下你的评论吧 !
