

常见到的激光测距传感器所使用的原理
电子说
描述
第十四届智能车竞赛赛道中凸显的横断路障,它让去年韩国国内智能车竞赛中参加决赛的队伍备受困扰,同样,它也使得今年国内参加比赛的队员感到苦恼。
2018年韩国全国大学生智能车竞赛中的横断路障
成功越过横断路障的关键就是需要能够尽可能提前检测到它的存在,然后在路障前后的一米区内精确绕过路障。
在绕过路障的过程中,车模不再具有赛道的导引。如果仅仅依靠车模开环控制完成绕行,则车模的轨迹就会受到赛道环境的影响,要么弯绕大了卡在旁边的赛道路肩上,要么弯绕小了,剐蹭在路障上。
视觉检测路障并开环绕行
为了避免绕行中厄运的发生,则需要对车模绕行路障引入反馈控制。
一种方案就是在车模上增加转向陀螺仪和车模行进距离传感器,这样可以精确控制车模运行轨迹,从而能够适应更加复杂多变的 环境。
另一种方案就是增加路障距离传感器,控制车模与路障之间的距离使得绕行转弯不太大也不太小。
近期很多同学在寻找各种测距传感器。传统的超声传感器对于反射物体 要求比较高,面积小的物体就会测不到,测量距离误差较大。现在更多同学把目光转移到一大类基于激光的测距传感器。
常见到的激光测距传感器所使用的原理包括有:TOF(Time of Flight),几何测距,结构光方法等。
TOF测距原理和超声波测距相似,只是它使用的是光波。由于激光定向性强,所以探测空间分辨率较高。由于它是通过测量光波从发送到接受之间的时间差来计算物体距离,所以物体表面的反射率对于测量结果影响不大。
TOF激光距离传感器
由于半导体工艺的进步,TOF激光测距传感器的价格也比较便宜。近期很多同学在询问这类传感器是否可以允许用于竞赛中。
对于这类封装比较小(集成了传感器,处理电路和接口芯片)的模块可以被当做整体传感器应用于竞赛中。但需要排除 一些体积比较大并具有MCU,功能比较综合的TOF传感器。
TOP10120传感器以及其中的接口芯片
TOP10120是一款TOF激光测距传感器。它的测距结果可以通过UART,或者I2C总线输出。测量范围在100~1800mm,输出结果速度最快每秒33个数据。
通过UART输出的测量结果以及串口波形
该模块体积比较小,价格相对比较便宜,在一个车模上可以安装多个这样的传感器。所以很多同学不仅希望使用它检测赛道中的路障,而且还希望用于信标组中,检测信标障碍。
那么这个传感器在使用中,究竟效果如何。对于大的路障,小的信标检测距离有多远。是否会受到环境光线影响,多个TOF模块之间是否会存在干扰呢?
TOF测试接口
为了回答上面的问题,下面就通过实验来一一验证它。
为了更好的衡量TOF10120测量的空间分辨率和测量范围,下面将传感器固定在 一个小型的舵机上,然后让舵机进行旋转,便可以得到TOF传感器在水平方向上的空间分辨率和检测精度。
使用小型舵机旋转TOF传感器
下面是一个长度为1米左右的水平导轨,可以承载检测物体在纵向进行移动,这样可以测试TOF传感器的距离精度和检测范围。
纵向滑轨
使用一个红色表面的木箱作为检测对象。放在滑轨上沿着远离传感器的方向移动。
在木箱在远离方向上的每一个地点,舵机带动TOF传感器就左右扫描一周,可以的到在当前距离下,从不同方位所检测到前面物体的距离。
具体结果如下图所示。距离扫描曲线显示TOF传感器在空间分辨率上是很高的。

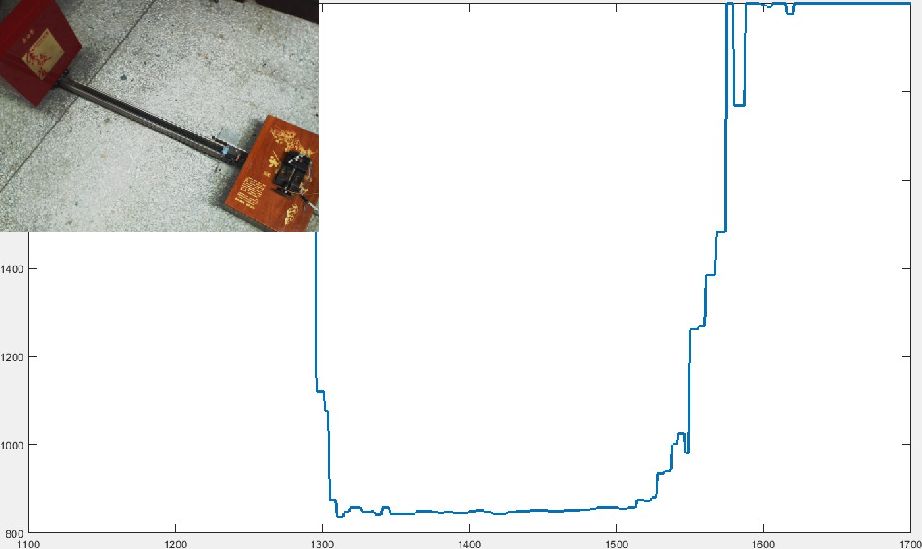
红色物体在远离过程中TOF扫描水平方向上所得到距离曲线
从上面动图可以看到,随着木箱 远离传感器,传感器前面所测到近距离的范围原来越小,同时距离数值也随着木箱的远离逐步增加。
当木箱移动到接近1米的时候,检测距离曲线出现了很多噪声,数据变得不可靠了。
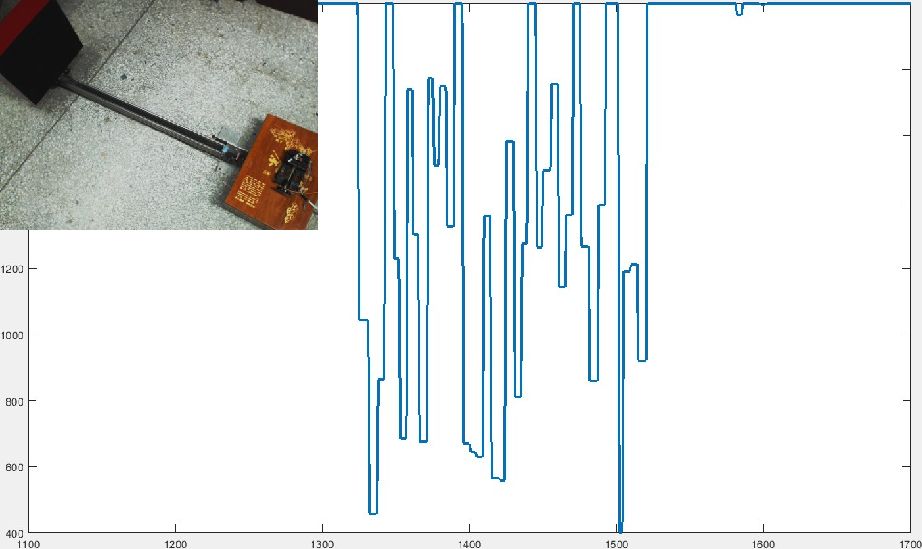
所选的木箱底部是黑色,当黑色底部对准TOF传感器时,可以看到当距离城廓0.5米之后,测量数据就开始具有很多的噪声了。测距距离明显减少。
黑色表面,检测距离缩小到0.5米
下面三个距离扫描结果曲线分别是针对白色反射面,红色反射面以及黑色反射面。反射物体距离TOF传感器大约700mm。
通过对比可以看到,白色和红色反射面所测量的结果噪声基本相同,而黑色反射面结果中的噪声则非常大。

白色反射面测量距离扫描结果
红色反射面测量距离扫描结果
黑色表面距离扫描结果
因此比赛中所规定路障的颜色为红色,利于TOF传感器的检测。
考虑到实际路障的尺寸是45厘米,比实验中的木箱更大,因此,可以推测使用TOF10120传感器检测到路障的正面距离应该能够大于1米。
TOF传感器是否可以比较可靠的检测到信标呢?
下面使用同样的测试方法绘制了信标灯罩在不同的距离下被TOF传感器扫描的距离曲线。
信标灯罩在不同距离下检测距离结果曲线
从上面结果来看,当距离超过0.7米之后,信标就基本上无法检测到。如果再考虑到现场环境的影响,所以使用TOF检测信标的距离只能在半米左右。
如果信标车模控制的好的话,比如同时使用它的四轮,完成横向运动,半米的距离是可以灵活的躲开信标灯。
只是需要考虑到在H车模四周都安装该激光测距传感器。
由于得到最后一组数据的时候,已经到了晚上,外面没有了阳光。否则需要测试一下,在阳光下的环境中,TOF检测距离是多远? 看是否能够满足室外越野组的避障检测。
两个TOF之间的相互干扰
上图动图显示了两个TOF传感器之间的相互干扰的情况。手持一个TOF传感器旋转,如果碰巧照射在另外一个传感器上,则传感器输出为2000,这是错误的检测结果。如果TOF不是正向照射在另外一个传感器上,它们测量结果还是正确的。
因此,在一个车模上是可以在四周同时按照多个TOF传感器。只要注意他们之间不会相互直射即可。
在比赛中的决赛阶段,如果赛道上是两个车模同时进行运行,理论上他们上面的TOF传感器是可能发生干扰的。不过这种干扰的几率会很小。
-
有没有推荐的激光测距传感器2025-11-13 2633
-
lidar传感器和激光测距传感器的区别2024-08-29 2114
-
激光测距传感器的原理和应用实例2024-03-05 3906
-
如何选择激光测距传感器?2023-10-10 2493
-
激光测距传感器有哪些优势2022-11-05 2810
-
LDS激光测距传感器2021-09-14 2773
-
激光测距传感器的分类与应用2019-09-26 4403
-
激光测距传感器的应用2018-11-12 3025
-
Dimetix Ag激光测距传感器和激光传感器DLS-A2018-10-24 3965
-
baumer激光测距传感器独特应用2018-04-27 3625
-
激光测距传感器原理及应用2009-11-07 1954
全部0条评论

快来发表一下你的评论吧 !
