

高解析度Matrix矩阵LED的汽车大灯技术将汽车照明技术带入了新的阶段
电子说
描述
摘要
高解析度Matrix矩阵LED的汽车大灯技术将汽车照明技术带入了新的阶段,传统测量方法已经很难满足其性能评价需要。需要创新的测量评估技术。本文从快速配光测试及LED像素亮度测量两个方面进行了详细描述,包括测试原理、测试方案、数据处理、算法,以及影响因素等。其中的快速配光测试方案,也可适用其它AFS智能大灯产品。
当前市场上的自适应头灯中,多采用多颗LED组件彼此并排排列安装在头灯中,需要额外安装电子元件控制LED组件的开关或强度,并且需要针对不同场景设定照明配光模式。随着LED技术的发展,智能高分辨率头灯的问世将自适应大灯带入了新的发展阶段。
典型产品如欧司朗的µAFS LED前灯,包含3个LED光源,每个光源还有1024个独立可控的点光源(像素)。这意味着头灯可准确适应具体的交通状况,确保随时保持最优照明效果。
图1:欧司朗µAFS 高解析度Matrix LED 头灯
这种高解析度的自适应头灯,对测试技术提出了新的挑战,除了需要满足传统的配光测试需求外,还需要考虑另外两个特点:
1) 复杂多变的配光测试:在较短的时间内完成多种场景下的配光测量
2)LED像素的光学性能评价:测试到每个像素的亮度信息。
快速配光测试
汽车前灯的空间光强分布通常通过角度计,在规定距离,进行扫描测试。这种测试方法不仅需要较大的测试空间(通常为25米测试距离),而且需要花费大量的时间(从几十分钟到几个小时)。对于自适应智能大灯,仅仅通过法规测试不能满足要求,最好可以满足一下特点:
1) 测试速度快:即可在较短的时间内完成不同模式下配光测试,还可监控配光本身的稳定性,例如通过动态测试,监控明暗截止线或肘点的稳定性。
2) 具备自动明暗截止线、肘点识别及Re-aim功能,以满足法规测试需求
3) 鉴于白光LED的空间颜色不均匀特点,最好能兼顾颜色特性测试。
如果前灯的光束直接照射在投影幕墙上,投射到幕墙上的光通量在墙上产生一个照度值,这样可以通过图像解析的亮度计得到该墙面的亮度分布。如果该墙面及房间参数足够理想,就可以从亮度图像计算得到相应的照度分布以及光强分布。除此之外,可以得到任意平面的照度分布图(如路面照度分布,10米远处的投影屏照度分布等),也可以得到半球空间的照度分布(就像ECE规定的25米半径的前照灯照度分布)。
如上所述,是一个非常有吸引力的快速测试方法,只需要几秒就可以完成前灯的光学测量。
图2:25米半球范围内的车灯(近光灯)照度分布图,用伪彩色表示照度值,坐标为角度坐标
测试原理
两维的亮度空间分布L(x,y) 是一个与人眼视觉系统相关的物理量。然而,在大灯测试评价领域,人们更加关心照度值。所以,必须进行必要的光度学转换。入射的光通量中的一部分被反射表面所反射(反射率ρ),另外的被吸收,反射部分可以是镜面反射,也可以是漫反射,也可以是二者混合。如果反射是理想的漫反射,则亮度值L(ϑ,ϕ)就与光束的方向无关,L(x, y,ϑ,ϕ ) = L(x, y) ≠ f (ϑ,ϕ ),换种说法,即不同的测试方向得到的亮度值与该处的照度值E(x,y).的比值为一固定常数。如果一个反射表面满足完全漫反射条件,就可以通过图像解析的亮度测试技术直接得到空间的照度分布。
由于采用了漫反射屏作为测试中介,因此我们称之为间接法测量。
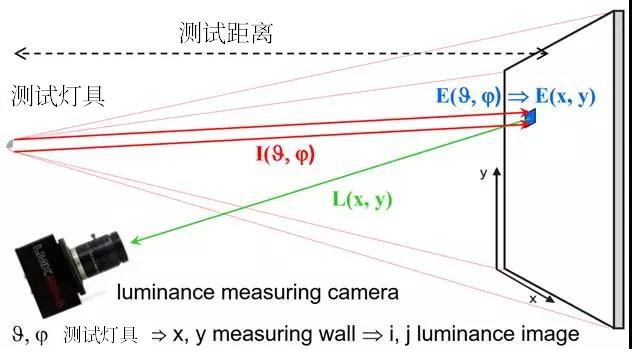
图3:间接法快速配光测试原理示意图
杂散光
在对光进行测试时,必须注意,只能让被测量的光进入光接收器件(LMK 成像亮度计),否则,光源在任意表面产生的反射光都有可能进入光接收器,从而使得测试结果偏离。所有非测试需要的光统称为杂散光,反应在亮度图像上,可以在全部或局部增加亮度,在本测试项目中,杂散光对暗区影响,导致亮度值增大,实际上,在该区域,亮度应该更弱,甚至完全没有强度信号。这样就影响了最终的测试结果。实际测试发现,在对比度超过1:200的情况下,与真实值的偏离将非常严重,而且,图像的对比度将会降低。
杂散光来源分析及消除
杂散光由不符合要求的反射、光源以及一些透射材料产生,这些现象既产生于图像系统本身(如镜片之间的反射),也产生于房间布置的本身。
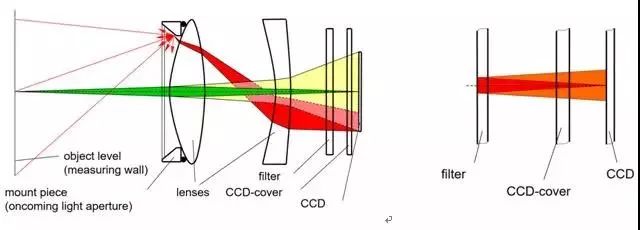
图4:杂散光来源分析示意图
亮度图像测试系统的杂散光可以通过设计减小杂散光(消光漆、设置光阑)。房间导致的杂散光主要有照射表面,光源本身,可以通过减低表面反射率,设置遮光光阑限制天花板或地面的反射光影响等。因此要获得准确的测试结果,需要对房间进行严格的设计和精确的安装。图5是一个理想的实际测试暗室的布置示意图。
图5:快速配光测试暗室房间仿真设计图
通过软件进行杂散光修正补偿
在测试系统中,杂散光无法完全消除,任何残留的杂散光都必须通过软件的方法予以修正,下图是近光灯照度分布图在杂散光修正前后的对比。
图6:10米墙面的亮度图像,左边有杂散光,右边是软件对杂散光修正后的亮度图像
测试实例
对于汽车前灯测试来讲,通常会用25米距离的照度分布来计算其光强分布。这种方法主要是将被测试的光源放在一个可以在J,j方向进行转动的角度计上,来得到照度分布。为了快速得到一个可靠的测试结果,间接法快速配光测试的最佳测试距离采用10米。
根据之前的描述,通过投影墙上的亮度分布可以得到照度分布。可以按照图5的要求建立暗室,对房间进行定标,包含:空间位置校正、光学校正、杂散光校正。经过这些校正,结合亮度计在室内的位置、前灯到墙的距离、前灯的高度等来计算各种光学量的空间分布:
1) 投影幕墙上的照度分布
2) 球面坐标下的照度分布 (例如r = 25 m)
3) 光强分布,以及在路面上的水平或垂直方向的照度分布
图7: 从投影幕墙上测得的亮度分布,计算出的路面垂直照度分布
除此之外,还可以在现有的25米暗室(或信号灯测试的3.16米暗室)基础上,进行改造,节省空间和预算。其中测试幕墙上开孔,让光线可以穿过到达25米远处光度探头。开孔部分的光学数据可以通过转动灯具补测给与补偿修正。
图8: 通过改造后的25米配光测试暗室兼具快速配光测试功能
肘点(elbow point)识别及Re-aim功能
由于采用成像的方法进行配光光型测试,因此在近光灯测试的时候,可以通过图像处理算法在光强分布图上识别到其肘点(elbow point)。找到肘点后,就可以自动将光强分布图进行坐标平移,移至基准中心点(0; 0 = HV),这样在实际测试的时候,只需将灯具进行粗略的对准,即可开始测试。
由于需要与相关的测试法规一致,用户通常需要根据测试法规进行Re-aim操作,即在检测到的肘点的一定区域内寻找替代肘点,对指定的测试点,如HV, B50L, 等,依据法规进行合规性判断。只有测试区域的所有点满足了测试指标,才可以认为该前灯符合法规。Re-aim功能在图像处理上,非常容易实现。
图9:可视化展示肘点(Elbow Point)及ECE测试点
得到肘点elbow point ,无论是这一点还是HV点,可以直观的显示在软件上,如图9所示,而且还可以输出其它数据,例如通过位置移动通过法规的测试点数量,相对于肘点的任意位置点的光强值。通过若干模组测试的统计,或不同时间的测试结果,可以分析一些趋势信息,例如肘点位置相对于光轴的变化信息、最大值、最小值,(与光轴相关肘点偏离、多个测试中的最大、最小值等),明暗截止线(AK31)的强度等,这些数据可以保存在文件中,也可以以图形的形式输出。
图像拼接
受限于房间大小,尤其是测试墙的宽度,水平方向单次测量的宽度有限,例如6米宽度约±24°,通过转动灯具(3X45°),分别测试,然后进行拼接,可实现大范围测量。转台可以采用独立的转台,或现有的25米配光角度计的转台。
图10:拼接图像及测试定示意图(图中暗区黑洞为测试墙上的开洞,用于25m探头测试光强)
对明暗截止线附近的颜色特性进行分析
传统的卤素灯或氙气灯,由于光学元件的色散,在明暗截止线区域有明显的色环现象,LED灯具本身具有空间的色不匀现象,叠加光学色散现象,因此对该位置进行色彩测量非常必要。本测试方案中的LMK具备色彩测量功能,可以获得色彩分布图像,如图,在水平–0.5°的位置,选取 +2° 到–2°的区间进行色彩分析, 图表所示既是该位置的色彩变化特性。
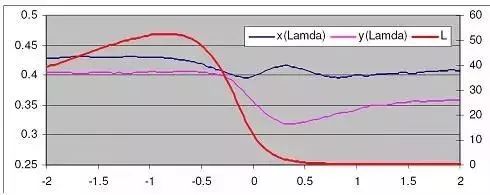
图11:明暗截止线区颜色分布特性测试
在更小的空间进行测量
上文所述的车灯测试方法,需要较大的空间,通过专门定制的聚焦消色散透镜可压缩光束尺寸,从而在一个紧凑的测试暗箱里完成测试。测试原理与前面所述完全一样,只是加入了一个透镜来缩短测试距离,整体尺寸 LxWxH: 95 cm x 50 cm x 43cm。
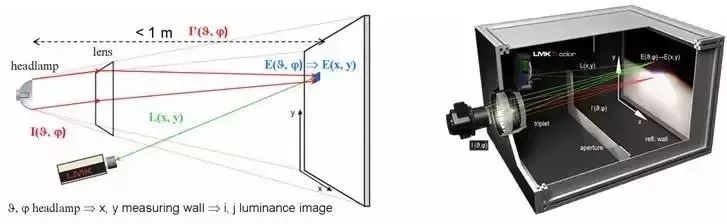
图12:紧凑型测试暗箱原理示意图
由于采用了暗箱,环境光造成的杂散光可以不计。该测试暗箱有两个部分组成。测试空间部分,有一个反射屏以及一个光阑, 另外一个空间,放置待测的前灯以及测试用的亮度计。该测试箱体也被用于光学透镜的质量监控。
Matrix LED 像素亮度测量
大部分的矩阵LED大灯LED组件少,可以通过成像式亮度计进行整体测量,进行发光体识别,进而得到亮度。而高解析度 Matrix LED像素密度高、像素小,自动识别发光体已经不太现实,尤其是像素与像素之间没有明显的亮度区隔。
本测试使用样品:Matrix LED像素数量 32X32,尺寸:4mmX4mm。
图13:测试用Matrix LED实物
使用Labsoft图像测试及处理软件,通过设定Mask来实现对矩阵中的每个LED亮度测量。要保证每个像素的测试精度,需要多个像素对应一个LED像素,因此需要高解析度相机以及远心镜头。本实验采用 LMK 5 相机配合远心镜头进行测试。
由于样品与相机不可能出现理想的对准情况,不可避免倾斜、偏转。通过建立测试mask,将倾斜的图像进行坐标变换,与Mask匹配,从而锁定每个LED像素位置,进而输出得到各个像素的亮度。
图14:原始亮度图像图15:32X32 测试Mask图16:修正后锁定LED位置的亮度图像
本文描述了快速配光测试技术以及高解析度Matrix LED的测量技术,这两种技术对于新型的汽车智能大灯测量具有独特优势,对于新型智能灯具的研发、生产、质量管理都有非常大的借鉴和使用价值。
-
三大数据解析LED照明产业发展前景2016-03-05 4427
-
求应用于汽车前大灯照明,led或激光技术2016-07-28 2812
-
2017 | OLED汽车照明发展大观察2017-12-18 3590
-
品佳推出英飞凌汽车LED大灯驱动方案2018-12-12 6086
-
三通道高侧恒流汽车线性LED控制器解决汽车照明问题2019-03-18 2137
-
汽车前照明中的LED发展概述2019-07-22 2133
-
汽车照明解决方案2019-07-24 2457
-
汽车前照明中的LED介绍2022-11-15 765
-
LED汽车照明项目正式投产2016-11-17 1056
-
汽车大灯的发展史是怎样的?激光大灯是否能成为汽车照明的主流?2018-08-12 5161
-
如何在汽车照明时代正确的选择LED大灯产品?2018-09-13 6225
-
赋能汽车照明系统的车用LED与驱动技术2023-04-20 2996
-
【世说设计】高亮度矩阵式LED,让汽车照明呈现更多可能2022-11-03 2031
-
智能矩阵式LED汽车大灯2023-08-23 2214
-
擎耀解码奔驰LED矩阵大灯大灯技术方案及九大特点2024-04-12 1908
全部0条评论

快来发表一下你的评论吧 !
