

以电机的最高转速为目的电子齿轮比设置
描述
伺服驱动器的位置控制模式,必须有电子齿轮比功能,才能顺利地与伺服控制器配合,其电子齿轮比的设置有不同的方法和目的,电子齿轮比一般分成分母及分子两项参数设置。
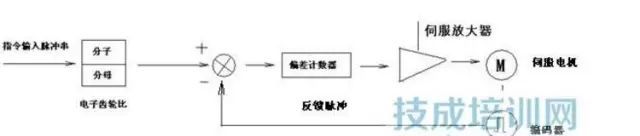
如上图:从上位机发出的指令脉冲串。经过电子齿轮比转换为一定比例的输入脉冲信号,与编码器反馈的脉冲信号相匹配,产生偏差脉冲信号,再经过伺服放大器驱动伺服电机。
1、以电机的最高转速为目的电子齿轮比设置
例如,伺服电机的额定转速为3000转/分;编码器的每圈产生的脉冲数10000脉冲数/圈。
通常PLC控制器输出的最高脉冲频率为100KHZ。
2、计算说明
要达到伺服电机额定转速3000转/分,需要输入的指令脉冲频率为
10000×3000/60s=500000HZ=500KHZ
3、设置电子齿轮比
PLC能输出的最高脉冲频率为100KHZ,必须与编码器反馈的脉冲频率相匹配。
100KHZ×A/B=500KHZ,
A/B=500/100=5/1,即A=5,B=1
式中:
A为电子齿轮比的分子
B为电子齿轮比的分母。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
请问变频电机的转速最高是多少?2023-12-26 1039
-
伺服电机电子齿轮比怎么设置?2021-09-28 5000
-
1FK7063-2AF71-1RG1伺服电机的最高转速是多少?2023-12-12 878
-
变频器控制一个电机,最高转速由什么决定?2023-12-13 1037
-
理想空载转速是电机的最高转速吗?2023-12-20 1341
-
伺服电机电子齿轮比计算方法2018-02-05 132257
-
根据电机额定转速计算电机额定转速时电子齿轮比、脉冲当量2018-03-14 14478
-
齿轮减速机配电机如何保持最高转速2018-10-24 8455
-
高转速电机的类型和应用2020-06-25 4309
-
一文知道伺服驱动器电子齿轮比的设置方法2021-03-14 32943
-
全球最高转速伺服电机问世2022-12-14 2191
-
汽车电子电驱动高转速齿轮技术分析2023-06-01 491
-
直流电机怎么提高转速2024-06-04 4075
-
伺服电机转速一般多少?最高转速能达到多少?2024-07-11 12446
-
松下伺服电机电子齿轮比怎么设置2024-09-07 3774
全部0条评论

快来发表一下你的评论吧 !
