

图形变换之基本矩阵变换
电子说
描述
1)平移变换
从一个位置到另一个位置的变换可以用平移矩阵T表示,该矩阵通过向量 t = ( tx , ty , tz )对实体进行平移操作。

其实还有另外一种形式(以左手坐标系为基准):
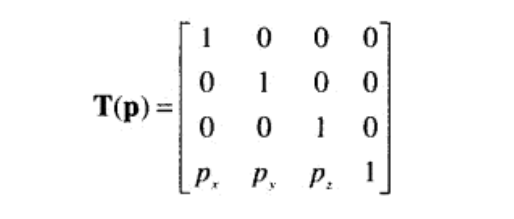
第一种形式(以右手坐标系为基准的)进行变换时将T与需要变换的点或向量 A(列向量)相乘,即 TA 。
第二种形式(以左手坐标系为基准)将需要变换的点或向量(行向量)与T相乘,即 AT 。
平移矩阵的逆矩阵为 T-1( t ) =T( -t ),也就是对向量t进行了置负操作。
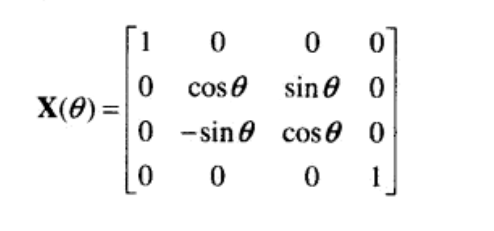
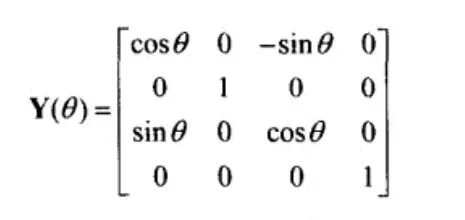
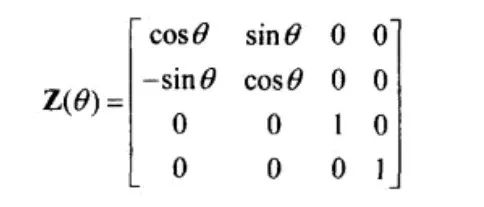
2)旋转变换
旋转矩阵Rx(Θ)、Ry(Θ)、Rz(Θ)分别表示将物体绕 x , y , z 轴进行旋转。
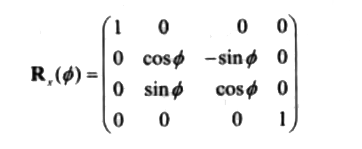
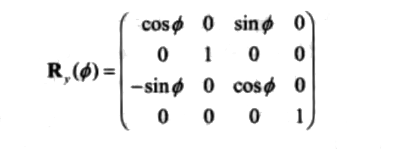
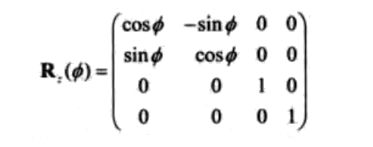
注意,旋转矩阵表示物体是绕着指定轴(轴的指向朝外面)按顺时针方向旋转的,但这个形式的旋转矩阵是以右手坐标系为基准的。
左手坐标系的为:
旋转矩阵的推导可以看这里:http://blog.csdn.net/zsq306650083/article/details/8773996
任意轴旋转任意角度矩阵:
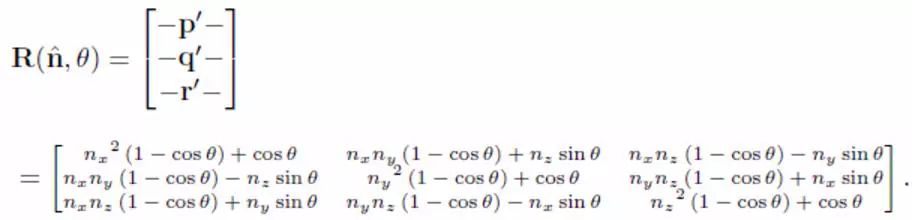
对于这个3x3矩阵来说,其对角元素之和是一个与坐标轴无关的常数,称其为迹(Trace):tr( R ) = 1+2cosΘ
矩阵R的逆矩阵就是其转置矩阵,还有其他获取其逆矩阵的方法,即将 Θ 取负(绕着同一 坐标轴朝相反方向旋转)。旋转矩阵的行列式总是等于1.
3)缩放矩阵
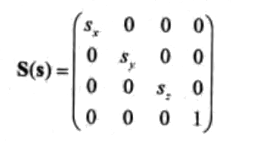
sx , sy , sz分别表示沿着 X Y Z 轴进行缩放的缩放比例。S矩阵的逆矩阵为 S-1( s ) = S ( 1/sx, 1/sy ,1/sz ) 。
如果对缩放矩阵 s 的一个或者三个分量置负,就会产生一个反射矩阵(镜像矩阵),如果其中两个缩放因子为 -1,那么将旋转180度,当发现变换矩阵是反射矩阵时,需要进行特殊处理,例如,一个三角形的顶点序列以逆时针方向排列时,在经过反射矩阵变换后,对得到一个顺时针方向排列的三角形顶点序列,这将导致不正确的光照效果和背面裁减。判断给点矩阵是否为反射形式,需要计算该矩阵左上部 3 x 3 矩阵行列式的值,如果为负,那么该矩阵就为反射矩阵。
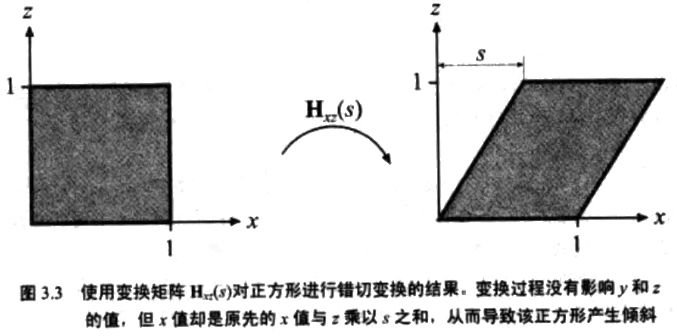
4)错切变换
错切矩阵有6种基本形式,分别表示为Hxy(s)、Hxz(s)、Hyx(s)、Hyz(s)、Hzx(s)、Hzy(s)。第一个下标表示由错切矩阵改变的坐标,第二个下标表示进行错切操作的坐标。
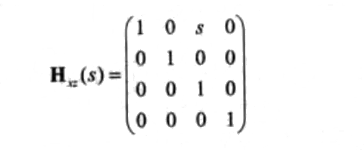
通过下标可以找到参数s所在的位置。如本例中 x = 0 , z = 2 。
错切矩阵的逆矩阵可以通过取负来取得 ( Hij)-1( s ) = Hij( -s )
5) 刚体变换
刚体变换用于刚性物体的变换,只改变物体的方向和位置,不改变形状。可以将刚体矩阵 X 写成一个平移矩阵和一个旋转矩阵的级联:

X的逆矩阵可以这样求得:X-1 = ( T ( t ) R )-1 = R-1T( t )-1 = RTT( -t ).
6) 法线变换
注意,法线必须通过用变换几何图形的矩阵的逆矩阵的转置矩阵进行变换 N = ( M-1 )T
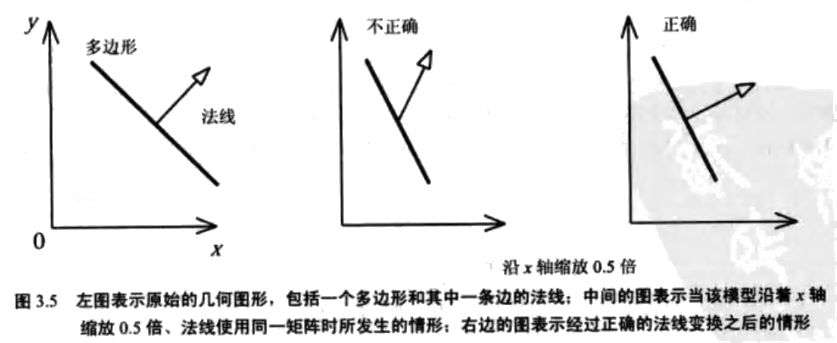
实际应用中,如果变换矩阵是正交的(如旋转矩阵),就没必要计算它的逆矩阵,因为正交矩阵的逆矩阵就是转置矩阵,两个转置矩阵相互抵消,相乘的结果还是原来的旋转矩阵。此外,还有平移矩阵,由于平移不改变向量的方向,所以可以进行任意次数的平移而不对法线产生任何影响。另外,如果使用一个或多个一致性缩放矩阵进行变换,也不需要计算相应的逆矩阵,因为这种缩放只改变法线长度,不影响其方向。这种矩阵进行变换之后需要对法线进行归一化(规范化)。
-
鸿蒙ArkTS声明式开发:跨平台支持列表【图形变换】 通用属性2024-06-04 1146
-
Harmony/OpenHarmony应用开发-矩阵变换2022-12-16 1976
-
变换矩阵无法实现正常变换2021-08-27 1319
-
周期矩阵脉冲信号傅里叶变换问题求解2021-06-26 1190
-
如何使用坐标变换和保角形变换理论设计电磁波波导转接器件2020-09-17 1194
-
一种基于保角形变换理论的电磁波导波结构设计介绍2019-06-24 2178
-
双级矩阵变换器的解析变换及仿真2017-11-23 1034
-
基于Matrix矩阵变换的图形变换技巧分享2017-09-06 1021
-
基于Multisim的三角波变换成锯齿波,就是输入三角波信号经过波形变换器后变换成锯齿波信号?2017-05-08 11098
-
矩阵变换器新型SVPWM调制策略的仿真研究2016-03-30 610
-
T形变换器及等效电路图2010-11-10 11570
-
矩阵式变换器设计中的干扰抑制技术2009-07-04 969
-
变电站监控系统图形变换算法的研究2009-05-30 435
-
施密特触发器用于整形变换电路图2009-05-18 5073
全部0条评论

快来发表一下你的评论吧 !
