

什么叫图像复原?与图像增强有什么区别?
电子说
描述
图像复原
常用图像变换算法:
(1) 逆滤波;
(2)维纳滤波(Wiener Filter);
(3)盲卷积
22、什么叫图像复原?与图像增强有什么区别?
图像在形成、传输和记录中,由于成像系统、传输介质和设备的不完善,导致图像质量下降,这一现象称为图像退化。
图像复原和图像增强是有区别的,虽然二者的目的都是为了改善图像的质量,但图像增强不考虑图像是如何退化的,只通过试探各种技术来来增强图像的视觉效果。因此,图像增强可以不顾增强后的图像是否失真,只要看着舒服就行。而图像复原则完全不同,需知道图像退化的机制和过程等先验知识,据此找出一种相应的逆过程解算方法,从而得到复原的图像。如果图像已退化,应先做复原处理,再做增强处理。
23、说出几种图像退化:
图像模糊、失真、有噪声等
24、什么是维纳滤波器?
是一种以最小平方为最优准则的线性滤波器,在一定的约束条件下,其输出与给定函数的差的平方达到最小,通过数学运算最终可变为可变为一个拖布列兹方程的求解问题,是利用平稳随机过程的相关特性和频谱特性混有噪声的信号进行滤波。
25、说出几种常用的图像复原方法?
代数恢复方法:无约束复原;约束最小二乘法
频域恢复方法:逆滤波恢复法;去除由均匀运动引起的模糊;维纳滤波复原法
图像压缩编码
常用图像变换算法:
(1)哈夫曼编码;(2)算术编码;(3)预测编码;(4)变换编码
26、图像为什么可以压缩?(即数字图像中存在哪几种冗余?)
图像数据之所以可以被压缩,是因为数据中存在着冗余。 在图像压缩中,有三种基本的数据冗余:编码冗余;像素间冗余;视觉冗余。
27、什么是有损和无损压缩?
无损压缩:是对文件本身的压缩,和其它数据文件的压缩一样,是对文件的数据存储方式进行优化,采用某种算法表示重复的数据信息,文件可以完全还原,不影响文件内容,对于数字图像而言,也不会使图像细节有任何损失。
有损压缩:是对图像本身的改变,在保存图像时保留了较多的亮度信息,而将色相和色纯度的信息和周围的像素进行合并,合并的比例不同,压缩的比例也不同,由于信息量减少了,所以压缩比可以很高,图像质量也会相应的下降。
28、霍夫曼编码算法的基本思想是什么?
是根据源数据符号发生的概率进行编码的。在源数据中出现概率越大的符号,分配的码字越短;出现概率越小的信号,其码长越长,从而达到用尽可能少的码表示源数据。
29、损和有损预测编码算法不同之处?各在哪个环节对数据实现了压缩?
无损(亦称无失真、无误差、信息保持)编码中删除的仅仅是图像数据中冗余的数据,经解码重建的图像和原始图像没有任何失真。
有损(亦称有误差、有失真)编码是指解码重建的图像与原图像相比有失真,不能精确的复原,但视觉效果上基本相同,是实现高压缩比的编码方式。
30、简述统计编码、算术编码、预测编码、变换编码算法的基本原理
统计编码:根据信源的概率分布可变长码,使平均码长非常接近于熵。
算数编码:利用编码符号的联合概率,用一个单独的浮点数来代替一串输入符号。
预测编码:不是直接对信号编码,而是对图像预测误差编码。实质上是对新的信息进行编码,以消除相邻像素之间的相关性和冗余性。
变换编码算法:是通过正交变换把图像从空间域转化为能量比较集中的变换域系数,然后对变换系数经行编码,从而达到压缩数据的目的。
图像边缘检测、分割
图像处理常用算法:
边缘检测:Canny 算子、Laplacian算子、Sobel 算子
Hough变换检测直线和圆算法
图像分割:阈值分割算(也叫二值化)、区域分割算法 :区域生长法、分裂合并法、空间聚类法。
31、说出几个常用的边缘检测算子:
Canny 算子、Laplacian算子、Sobel 算子
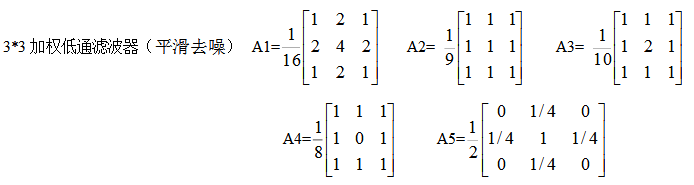
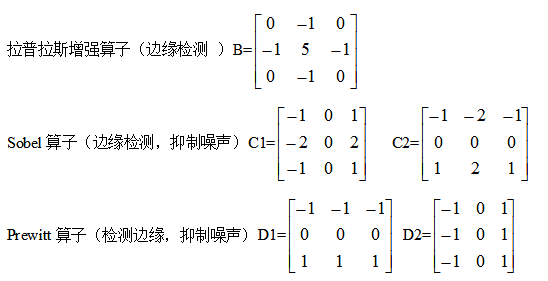
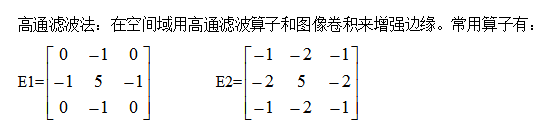
32、分别说出下面四种模板分别实现平滑去噪(低通滤波器)、图像锐化(梯度法)、边缘检测(高通滤波器)哪种处理?
附加:
1、灰度图像跟彩色图像:
灰度图像:是一个二维的灰度(亮度)函数f(x,y)
彩色图像:由三个二维灰度函数f(x,y)组成。三个是RGB或者HSV
2、图像处理:
从图像到图像:从图像到经过加工的另一图像
一个决策:将一幅图像转化为一种非图像的表示
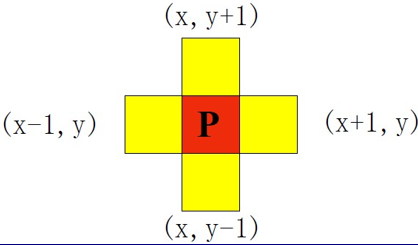
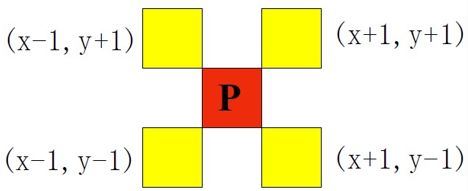
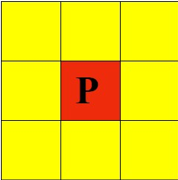
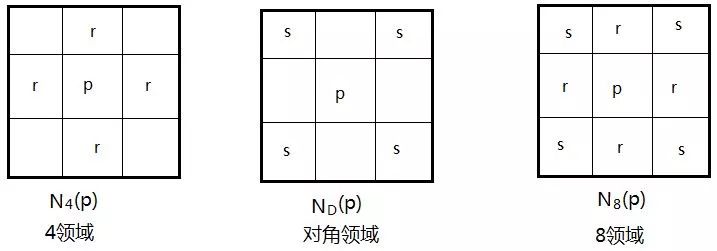
3、相邻像素:
四邻域:
对角领域:
八领域:

4、像素的连接、邻接、与连通
邻接adjacency:仅考虑像素间的空间关系
由像素间的度量关系知:
四领域也可以定义为:
八领域也可以定义为:
连接connectivity:
空间关系:满足邻接
灰度关系:灰度值是否满足某个特定的相似准则,用V来表示这个准则。
4-连接:2个像素p和r在V中取值且r在p的4邻域中
8-连接:2个像素p和r在V中取值且r在p的8邻域中
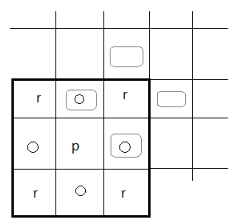
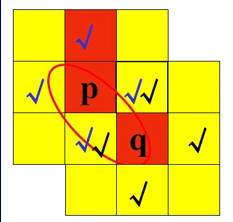
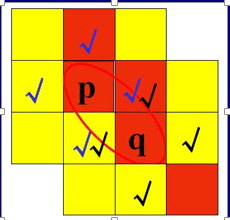
m-连接(混合连接):2个像素 p 和 r 在V 中取值,且满足下面条件之一即可
1、r在p的4领域中。
2、r在p的对角领域中且p的4领域与r的4邻域的交集是空集。如下图所示:eg:彩色图像中左边是m-连接,右边不是。
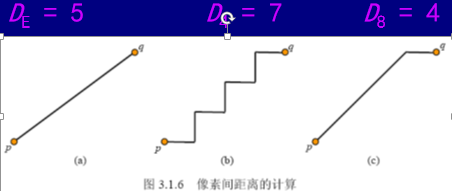
5、像素间的距离
3个像素p,q,r,分别具有坐标(x, y),(s, t),(u, v),度量函数记为D。
像素间距离的性质:
1>D(p,q)>=0 两个像素之间的距离总是正的
2>D(p,q)=D(q,p) 距离与起终点的选择无关
3>D(p,R)<=D(p,q)+D(q,r) 最短距离是沿直线的
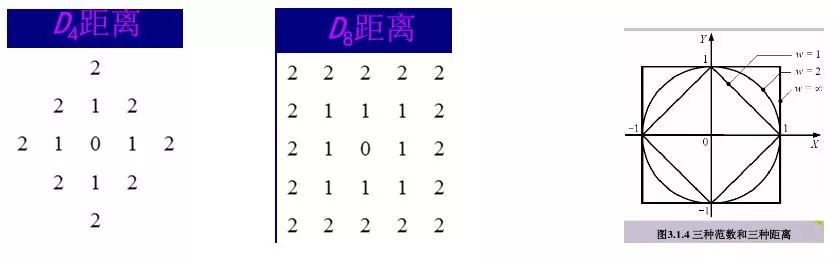
距离度量函数:
1>欧氏距离:距离p小于或者等于某一值是:以p为原点的圆

2>城市街区距离:距离小于或者等于某一值是以p为中心的菱形

3>棋盘距离:距离p小于或者等于某一值是以p为中心的正方形

......
-
Mamba入局图像复原,达成新SOTA2024-12-30 2209
-
图像处理技术都有哪些 图像处理技术六大技术介绍2022-03-25 39007
-
关于图像识别与图像处理的简述2021-03-27 9364
-
什么叫开关电源?和普通电源有什么区别?2021-03-11 3284
-
如何才能复原运动模糊图像详细资料说明2019-11-01 1584
-
基于fpga的图像处理2019-07-21 7789
-
图像处理教程之图像复原的详细资料说明2019-03-08 1624
-
分裂Bregman方法荧光显微图像复原2018-01-13 883
-
色彩复原图像的质量评价方法2017-12-18 839
-
基于岭回归的稀疏编码文本图像复原方法2017-11-28 930
-
基于运动模糊图像盲复原方法2017-10-31 987
-
图像分割介绍2016-06-24 594
-
使用改进的POCS算法的超分辨率图像复原2016-01-04 774
-
基于Matlab的图像增强与复原技术在SEM图像中的应用2010-02-26 3126
全部0条评论

快来发表一下你的评论吧 !
