

基于Elmo运动控制系统的飞机数字化装配过程浅析
工业控制
描述
飞机的部件成千上万,其中很多的结构件为钣金件或复合材料组成的薄型板状结构,其特点是外形复杂,连接面多为不规则曲面,同时其材料和形状决定了其具有的工艺刚性相对比较小,容易变形,给加工和装配都带来了比较大的困难。近年来,随着自动化水平的不断提高,通过引入了先进的数控技术,使得零件的加工技术得到了大幅度的提升,零件的制造周期大大缩短,品质也得到了很大的改善。但是,飞机的部件装配与整体机身的装配仍沿用传统的方法,无法适应先进的数控加工技术带来的效率的提高。飞机装配技术已经制约着飞机制造业的发展。本文主要介绍了通过使用Elmo运动控制系统,借助多点成形技术实现飞机柔性数字化装配。
系统工艺流程
图1示出工艺流程。多点成形技术是柔性工装设计的技术基础,其基本原理为采用多个均匀离散的点来拟合飞机装配部件的三维型面,通过精确的数字建模,控制各点的点位来达到精准的控制,使工装表面完全贴合飞机零件表面。使用这种柔性装配技术可以使飞机装配型架的制造周期大大缩短,并可以取代大部分固定装配型架。同时由于其采用了离散式的点位控制方式,使得该系统具有可重构性,一套该系统可以完成多种表面形状的零件工装。
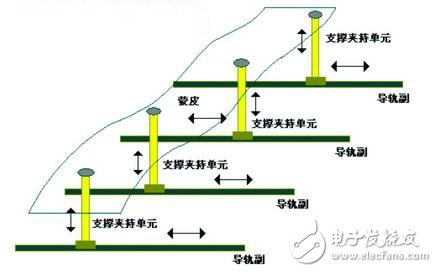
图1 工艺流程图
固定飞机薄壁板采用的是行列可移动式动态工装,其基本元器件为可移动的导轨副以及高度可以调整的支撑夹持单元,以上元器件的控制均通过数控伺服完成,通过伺服的不同位置调整使整个工装系统按照理论的点位分布,使蒙皮达到理论的工装外形。
系统框架
本系统主要包括以下几个部分:系统计算机主要计算并且给出数学模型;人机界面可以实时的显示和设定一些现场的工作参数;三维激光测量可以反馈实际的位置值回当前的系统计算机;以色列Elmo公司的MAESTRO多轴控制器为本运动控制系统的核心,配合CAN总线上挂接的多颗Elmo公司的伺服驱动器完成对多个点位的位置控制;同时,由于工艺方面需要的夹持等功能,故CAN总线上还挂接有一些现场总线I/O。如图2所示。
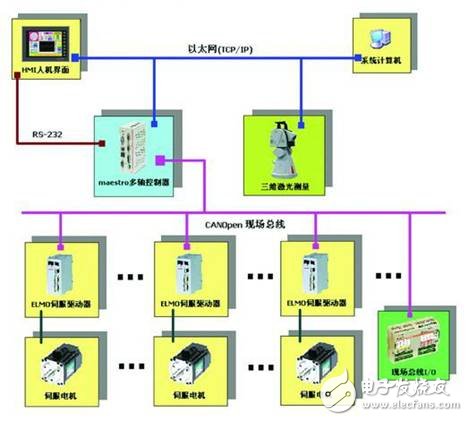
图2 系统框架
通讯部分
通讯部分,主要包括两大层面:
第一层面为以太网层
满足标准的TCP/IP协议,应用该通讯方式主要有以下好处:
通讯距离长,以太网的通讯极限一般可以控制到200m,基本上满足了大型飞机等设备的装配空间,同时避免了使用光纤通讯所耗费的大量的成本;
标准的TCP/IP协议,普通的计算机、工控设备可以很好的接入;
一般用户都比较熟悉使用,应用控制等技术相对比较稳定、成熟;
同时配合人机界面在设备现场通过RS-232方式操控和设定工作参数,弥补了以太网长通讯距离造成的操作不便。
第二个层面为现场总线层面
采用了目前在欧美普遍使用的CAN总线形式,使用该总线会给该系统带来如下的好处:
CAN总线为一种集分布式控制和实时控制于一体的串行通讯局域网络,其高可靠性、高性能、高实时性等特点已经得到了广泛的认可和应用;
本系统使用的CAN总线全面支持CANOpen 层面的DS301、DS305、DS401、DS402等协议,DS401、DS402这两个协议为基于运动控制所开发的通讯协议,可以直接应用于运动控制场合;
由于以色列Elmo公司的产品全部采用的是CANOpen协议,其相关的通讯底层协议全部为开放式,方便客户与自己的其他设备连接通讯;
CAN总线上可以挂接其他的设备, 例如现场总线I/O,但是所挂接设备必须支持CANOpen协议;
每个CAN总线理论上可以支持最多108个节点(Node),以色列Elmo公司目前的MAESTRO多轴控制器最多具有2路CAN总线,理论上最多支持216个节点,每个节点均可以挂接伺服电机或者CAN总线设备,故对于未来设备的扩展带来了很多的方便之处。
MAESTRO的特点
以色列Elmo公司设计生产的MAESTRO为一种基于网络的多轴运动控制器,可以完成2D、2.5D的差补,多个轴的同步以及开始、停止等类似 PLC的运动控制功能,同时其在整个系统的通讯层面可以完成的工作很丰富,诸如:网络的网关;各个节点的状态的监控;运动的网络远程访问和控制;CAN现场总线的主站等。
一种基于MAESTRO的多轴运动控制系统可以简单的用如图3所示的框图来表示:
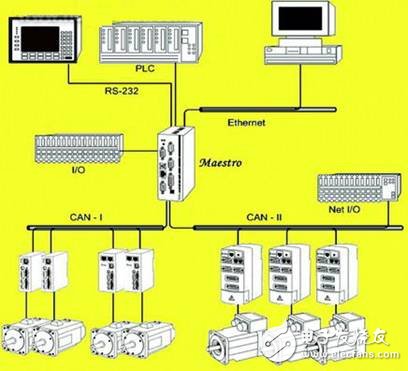
图3 多轴运动控制器框图
其中,需要明确几个定义:
轴:每一台驱动器与每一台电机组成对,完成单个运动的控制,称其为轴。
组:由多个轴组成,可以由MAESTRO发相同的同步指令到组里面的各个轴,其中每个独立的轴均可以完成独立的运动,同时要求构成组的每个轴的运动形式必须要一致。组可以定义多个。
矢量组:一般为由两个独立的轴组成的组,通过严格的控制时钟同步来获得精确的单轴运动定位,借此获得期望的系统性能,同时矢量组可以完成2个轴的直线差补、圆弧差补以及螺旋差补等功能。同样,矢量组也可以定义多个。
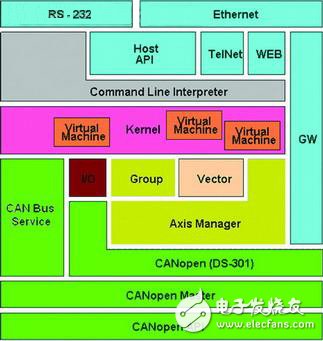
图4 MAESTRO的基本构成
其中,按照功能不同,将其内部分为了五层,分别用不同的颜色表示,具体功能如下:
作为CAN现场总线主站的MAESTRO可以提供很多的网络功能,其中包括了完成网络配置;侦测并描述出CAN网络中存在的CAN设备;通过使用标准的CANOpen协议完成CAN网络信息的接收和发送;CAN网络报警信息处理;根据其内部自带的同步机制完成时钟同步;通过使用CANOpen 的 DS301、DS305、DS401、DS402协议完成各个CAN设备之间的通讯等。同时,其作为同步运动控制器还可以实现以下一系列的同步功能: 发送同步运动指令到指定的运动单元轴;同步运动单元轴之间的启动和停止等动作;通过其内部的callback功能实现对运动完成以及Elmo驱动器内部定义的触发条件等的监控;以及发送通知到上位机等。
在与上位机通讯的过程中,MAE-STRO可以使用的通讯方式有TCP/IP以及RS-232。通过该通讯可以完成的功能包括:程序的上传和下载;系统当前的状态反馈;用户程序运行情况的反馈;传输和解释对MAESTRO的指令以及对任意一台终端CAN设备的操作指令。用户还可以通过使用 Elmo公司提供的Composer软件通过这条通路完成对终端Elmo驱动器的直接操作和监控。
在运行用户程序方面,MAESTRO也有其独有的一些特点:其作为一个全面可编程的运动控制器可以实现并完成多轴运动的编程工作;可以运行一个或者多个用户程序;用户可以通过使用MAESTRO的编程语言来实现对其的编程操作,其编程语言与Elmo公司的驱动器的编程语言类似,都属于类C的计算机语言,非常容易掌握;同时,其编程环境可以使用Elmo公司提供的Elmo Studio软件来轻松实现。
基于以上的诸多特点,通过MAESTRO与Elmo智能型驱动器的配合使用,笔者便构成了一套分布式控制系统的基本框架,用户可以根据自己的使用工艺要求和具体的工况来选择合适的搭配和扩展,可靠稳定的完成预期功能。

图5 内部功能示意图
结语
目前,应用该套分布式控制系统的飞机柔性装配系统已经通过了国家的验收,准备投入批量生产。由于国内对于CAN总线的研究起步比较晚,在具体应用方面相对于国外也有很大的差距,对这方面的了解也并不是很全面,还处于摸索阶段。但是通过该项目的成功应用,更加坚定了公司对这种分布式控制系统的推广信心。我们将会加倍努力,将该套控制系统应用于诸如医疗、纺织、印刷等更多的行业和领域。
-
单片机控制系统中一种新颖温度“数字化”的方法2011-03-04 2367
-
基于DSP的弧焊逆变电源数字化控制系统2011-03-07 1581
-
求一种基于DSP+CPLD的全数字化控制系统的实现方案2021-04-22 1729
-
核电站数字化仪控系统与传统控制系统相比有何优势?2021-07-07 1435
-
什么是运动控制系统2021-09-01 1456
-
Elmo驱动器的简单调试过程与运动程序2021-09-02 3054
-
计算机自动化装配专机,自动化装配生产线结构原理及其组成形式的详解 精选资料分享2021-09-13 2260
-
运动控制系统的基本方程2021-09-15 1681
-
什么是运动控制系统?运动控制系统的任务是什么?2021-10-29 4762
-
苦咸水淡化装置控制系统2009-05-26 694
-
装配流水线控制系统设计2016-12-17 1022
-
elmo交流伺服运动控制系统实验指导书备份2017-04-08 1065
-
巨蟹数字科技驱动数字化装配流程2022-12-09 1089
-
Elmo埃莫运动控制产品册2022-01-13 918
-
浅谈飞机总装自动化装配生产线2023-11-03 539
全部0条评论

快来发表一下你的评论吧 !
