

西门子1500与KUKA工业机器人的Profinet通讯步骤
电子说
描述
前段时间项目接触到需用西门子1515FCPU与库卡进行Profinet通讯,库卡的安全配置走的是Profisafe,并不是走的控制柜底部的X11插头,下面我将该项目的配置步骤分享给大家:
一、 硬件:
1. 西门子1515FCPU;
2. 库卡KRC4系统控制柜;
二、 软件:
1.Workvisual4.0;
2.博图V14SP1;
三、步骤:
1.连接好机器人电缆并正常开机后,会发现示教器上方会显示一条横向提示框,如下界面黄框标示部分:
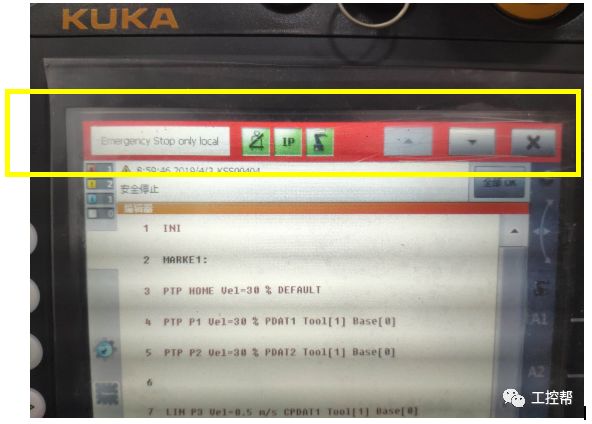
这时你需注意下机器人控制柜下侧是否有标号为X11的插座,若无的话,说明该机器人的外部安全配置需通过网络来配置。
2.机器人侧的组态:
打开WorkVisual4.0并在线下载KUKA备份,有时候若你不知道使用该软件的哪种版本的话,你可以从机器人控制柜拷出来,一般机器人发货时会把能用到的软件都备份在机器人的控制柜内,这是你可以用U盘拷出来,具体方法不在这多说,今天主要讲软件配置问题;
(1).打开WorkVisual,点击搜索,出现下图所示:
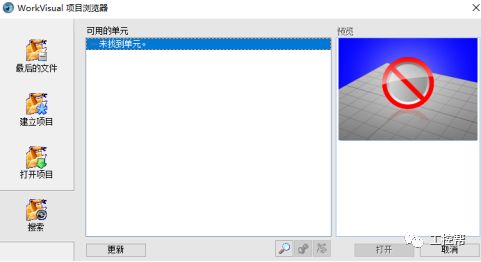
(2).可用的单元项若显示未找到单元时,需对机器人和自己用的电脑IP进行设置,使两者都处于同一网段,设置好后再次点击搜索,就会出现下图所示:
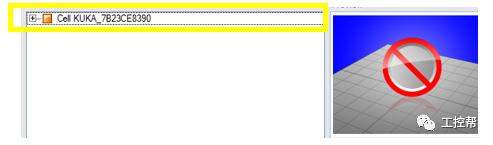
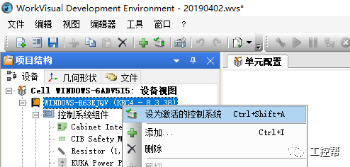
点击“+”,出现子选项》》选中绿色箭头标记一栏》》点击打开;
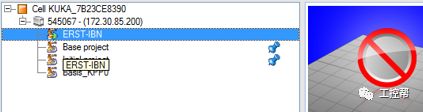
(3)右键下载完成的项目》》再点击“设为激活的控制系统”;
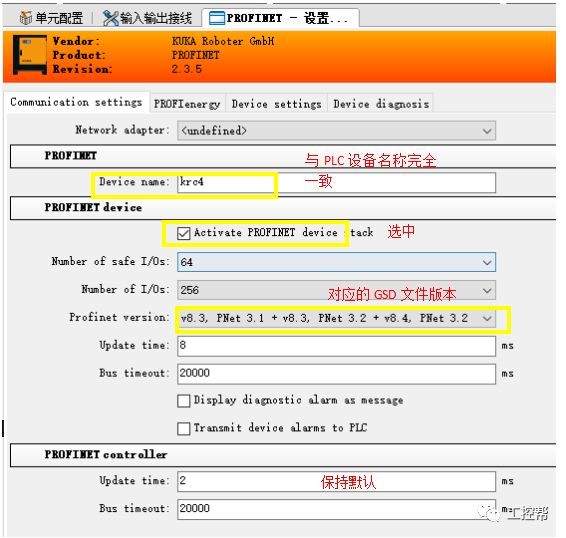
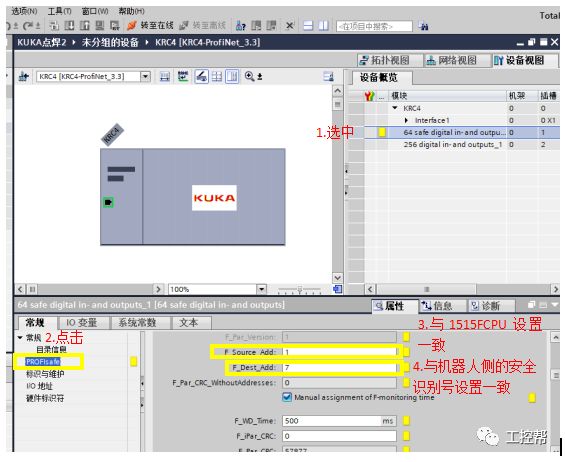
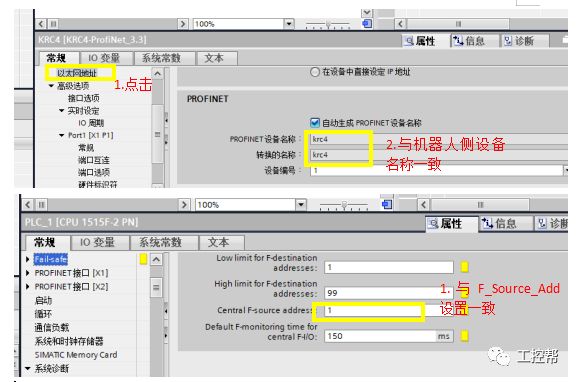
(4).右键点击Profinet》》再点击“设置”,出现下图,黄色标记部分需特别注意,PLC组态时会用到,当两边都设置一致时通讯才会进行:
(3). 双击下图中的设置》》选中“参数‘’》》设置 安全识别号;
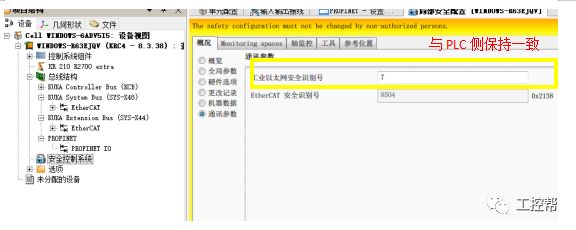
综上,机器人侧设置完毕,将修改后的配置传到可控制柜即可。
3. PLC侧的组态:
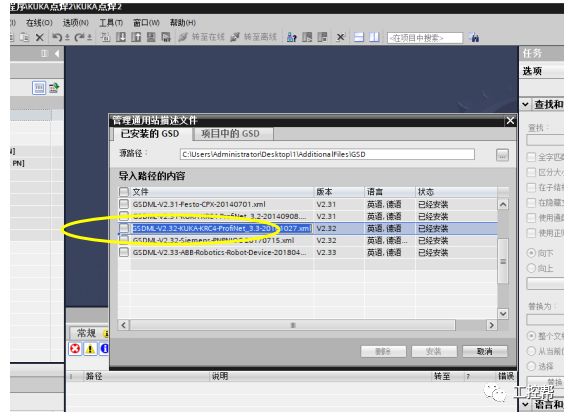
(1) GSD文件的导入:点击选项》》管理通用站描述文件》》选择与机器人侧相同版本的GSD文件,进行安装;
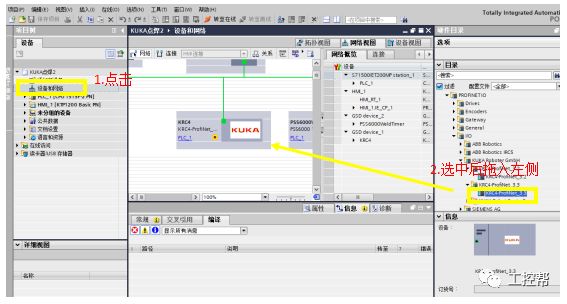
(2) 点击“设备与网络”》》将添加的GSD文件拖入设备与网络框内;
(3)双击KUKA标识》》修改属性;
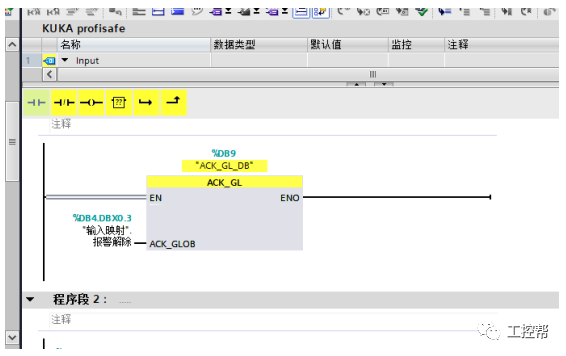
(4) 编程:根据自身的要求设置输出,当在Safe功能块进行编程时,注意添加去钝化程序,当报警触发时,解除报警需要激活去钝化程序,这样用到的安全(Safety)IO点才会刷新。
KUKA自带的安全IO包括的信号名称与对应地址可在WorkVisual中查询,查询方法:
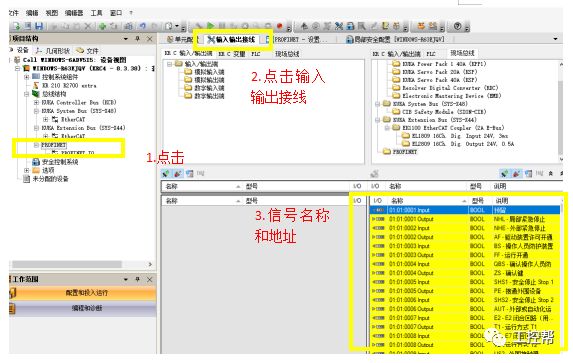
当通讯正常配置并导入后,示教器会出现下列报警,可以通过报警信息和上图片中的IO信号名称、地址作对应,进行激活;通常需要配置的信号为:002 Input NHE-外部紧急停止 (急停按钮)
002 Input操作人员防护装置(安全门、光栅)
005 Input安全停止1
006 Input安全停止2
010 Input安全运行停止
4.过程中遇到的问题及解决方法:
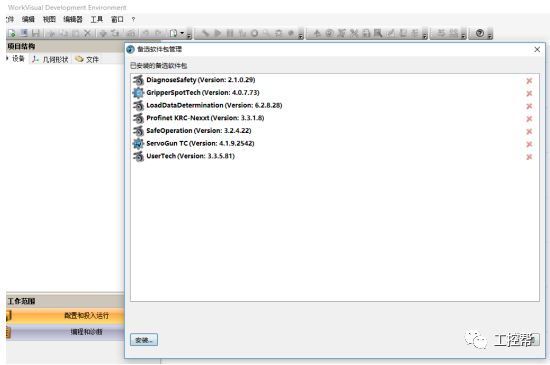
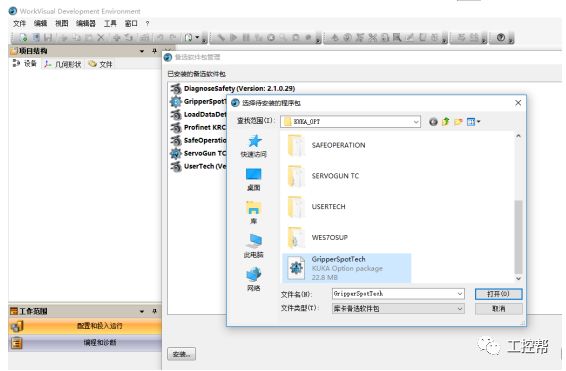
当把WorkVisual的备份重新传入控制柜时,WorkVisual出现报警信息,见下图:原因是机器人控制柜已安装一些功能软件,而电脑的WorkVisual并没有添加这些功能,这是需要从控制内用U盘将那些功能软件安装包拷出来,并安装在WorkVisual上,安装方法:在不打开任何程序的情况下点击工具》》备选软件包管理》》安装》》选取拷贝的文件,之后再重新下载,解决问题。
-
 jf_07578995
2023-09-06
0 回复 举报您好,请问这个PLC和KUKA机器人控制柜之间的通讯的目的是什么呢? 收起回复
jf_07578995
2023-09-06
0 回复 举报您好,请问这个PLC和KUKA机器人控制柜之间的通讯的目的是什么呢? 收起回复
-
开疆智能ModbusTCP转Profient网关连接西门子PLC与川崎机器人配置案例2025-07-26 1652
-
ABB机器人与西门子PLC通讯案例2025-02-02 4723
-
Profinet转Profinet网关应用在霍尼韦尔DCS与西门子1500PLC通讯案例2024-12-12 1730
-
ABB机器人与西门子PLC的Profinet通讯设置2024-06-17 12994
-
Kuka机器人配置Profinet通讯网关HT3S-PNS-ECS2024-06-13 1932
-
实现ABplc机器人的EthernetIP转西门子的profinet IO的应用2023-11-28 1515
-
EPR6-S工业机器人通过EtherCAT转profinet网关接入西门子系统2023-10-24 1759
-
profinet转ethernet网关连接发那科机器人配置案例2023-08-03 1567
-
KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤2023-07-05 9673
-
西门子Profinet连接EtheCAT伺服驱动器2022-10-20 6853
-
ABB六轴机器人与西门子1500PLC使用手册2021-05-07 2313
-
雅马哈机器人配置方法之西门子S7-1500控制技巧分享2020-04-27 17470
-
西门子S7-1500系列PLC控制的6轴机器人系统解析2020-03-29 11574
全部0条评论

快来发表一下你的评论吧 !
