

机器人4大坐标系讲解
电子说
描述
机器人的坐标系,你知道多少 ?真的会使用坐标系吗?下面我来带你来剖析机器人的坐标系吧!(以ABB机器人举例说明)
1. 基坐标系
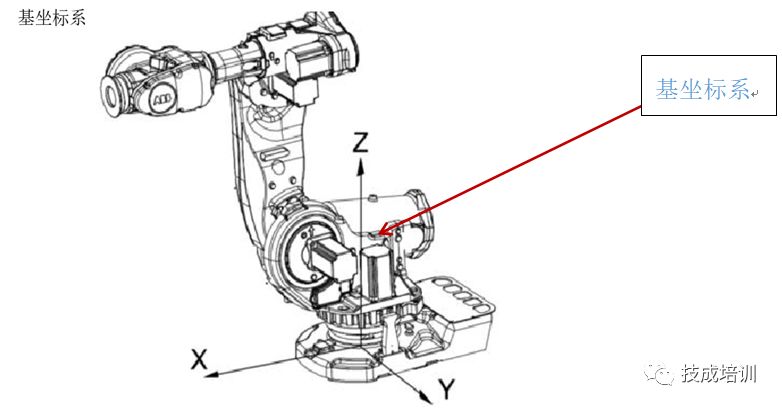
基坐标系是以机器人安装基座为基
准、用来描述机器人本体运动的直角坐标系。
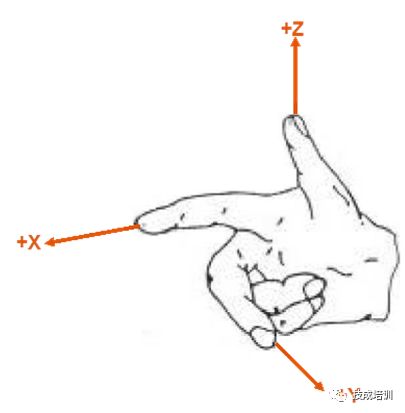
任何机器人都离不开基坐标系,也是机器人TCP在三维空间运动空间所必须的基本坐标系(面对机器人前后:X轴 ,左右:Y轴, 上下:Z轴)。
坐标系遵守右手准则:
2. 大地坐标系
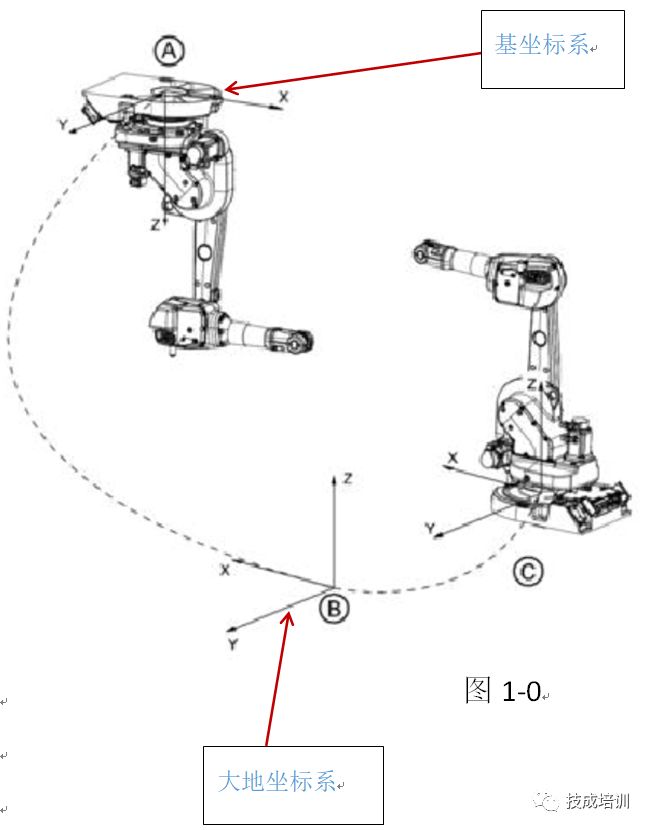
大地坐标系:大地坐标系是以大地作为参考的直角坐标系。在多个机器人联动的和带有外轴的机器人会用到,90%的大地坐标系与基坐标系是重合的。但是在以下两种情况大地坐标系与基坐标系不重合:
(1)机器人倒装。
如图1-0,倒装机器人的基坐标与大地坐标Z轴的方向是相反,机器人可以倒过来,但是大地却不可以倒过来。
(2)带外部轴的机器人。如图1-1,大地坐标系固定好位置,而基坐标系却可以随着机器人整体的移动而移动。
3. 工具坐标系
工具坐标系:是以工具中心点作为零点,机器人的轨迹参照工具中心点,不再是机器人手腕中心点Tool0(如图1-2)了,而是新的工具中心点(如图1-3)。
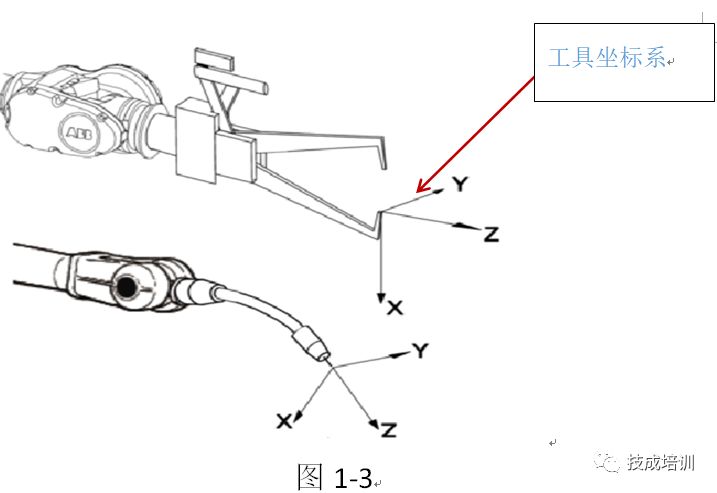
例如:焊接的时候,我们所使用的工具是焊枪,所以可把工具坐标移植为焊枪的顶点。而用吸盘吸工件时使用的是吸盘,所以我们可以把工具坐标移植为吸盘的表面(如图1-5)。
4. 工件坐标系
工件坐标系:工件坐标系是以工件为基准的直角坐标系,可用来描述TCP运动的坐标系。
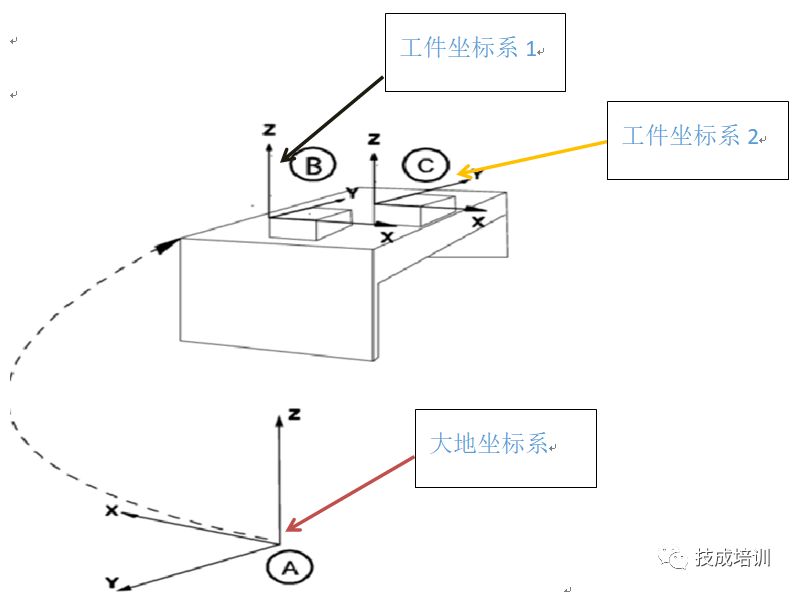
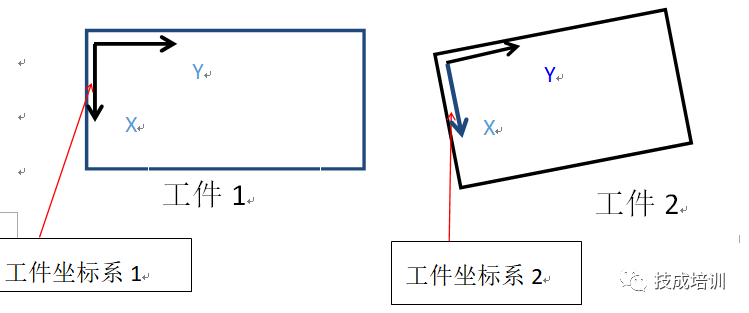
充分利用工件坐标系能让我们编程达到事半功倍的效果。
例如:机器人加工工件1,轨迹编程已经编好,另外有工件2,轨迹不需要重复编程只要把工件坐标系1改为工件坐标系2即可。
- 相关推荐
- 热点推荐
- 坐标系
-
工业机器人常用坐标系介绍2017-02-19 34935
-
abb机器人工具坐标系问题2024-08-07 14480
-
机器人的坐标系的建立2013-06-10 3007
-
介绍坐标系和机器人之间的纽带即连杆坐标系2021-09-01 1528
-
几大坐标系决定工业机器人精确性2018-04-02 2573
-
机器人基坐标系标定方法研究2018-03-07 1051
-
关于工业机器人的四类坐标系概述2018-10-05 28843
-
带你来剖析机器人的坐标系吧!2020-05-09 6092
-
KUKA C4机器人的轨迹BASE与TOOL坐标2020-12-23 6919
-
机器人坐标系用法和算法原理2023-05-11 2810
-
机器人坐标系选择指令和操作步骤2023-05-12 3512
-
世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的关系2023-07-03 15748
-
焊接机器人坐标系有哪几种2023-10-18 1877
-
深度剖析机器人的四大坐标系2023-11-13 3189
-
机器人中都有哪些坐标系2023-11-22 3115
全部0条评论

快来发表一下你的评论吧 !
