

自动驾驶汽车为什么需要高精度定位
汽车电子
描述
一、什么是自动驾驶?
目前,汽车的四大发展趋势是:电动化、智能化、网联网和共享化。其中,智能化与高精度定位的关联最大。
首先,简单介绍一下自动驾驶的等级定义。从没有任何驾驶辅助到完全自动驾驶,一共分为5个等级:L1、L2、L3、L4、L5。目前,大部分辅助驾驶功能,都在L1到L3之间。 L1、L2等级,实际上还是以人控制为主,只不过传感器和一些车载控制模块,会帮助驾驶员来执行一部分的驾驶功能;但从L3等级开始,驾驶员和车辆之间就会出现一个移交的过程,要么驾驶员将驾驶的主权交给车辆,要么在车辆认定自己没有办法自动驾驶时,将控制权交回给驾驶员。
目前,最前沿的自动驾驶功能,主要还是介于L2和L3之间。尽管对于L3需要到达什么样的自动驾驶功能,行业内还有一定的争议,但比较明确的是L2已经达到了可量产的水平。那么,它们上路后的效果如何呢?
据不完全统计,自2016年以来,已经发生了8起自动驾驶道路交通事故,其中就有4起是发生在L2级的自动驾驶汽车,原因也在于L2级的自动驾驶汽车是现在唯一量产出货的车型。
导致事故发生的原因也是多样的,从感知、决策再到控制,任何一个环节产生差池,都有可能引发交通事故。定位在 “感知”环节中是非常重要的一个模块,它会帮助车辆判断当前所处的位置,从而对目前的环境进行整体认知。
如果汽车能够定位自身的精准位置,再结合高精度地图,它对于当前整体驾驶环境下的一些静态或准静态的信息会产生非常准确的判断。基于此,自动驾驶决策系统才能够做出正确判断,然后控制车辆的下一步行为。
二、发展自动驾驶遇到的定位技术瓶颈
自动驾驶中的高精度定位技术,有绝对定位和相对定位之分。常见的激光雷达、摄像头、超声波雷达、毫米波雷达,都属于相对定位范畴;而GNSS(全球卫星导航系统)定位结合IMU惯性传感器的融合定位,能得到车辆所处的经纬度信息和当前的姿态信息,反映的是车辆在地球坐标系中的绝对位置,属于绝对定位。
但是,每一类定位传感器都有自己的优势,也有非常明显的缺陷。
例如激光雷达,它的测量精度、探测距离以及最终得出的结果都非常有保证,但是它成本高且部件易磨损,同时,在使用过程中比较容易受遮挡,也不能识别颜色文字图案等,导致量产能力弱。在前不久特斯拉的发布会上,马斯克也diss了激光雷达。
再比如毫米波雷达,虽然在当前的自动驾驶方案中被应用的非常多,但它的问题是探测角度小,需要安装非常多的毫米波雷达,才能实现对车辆周边整体环境探测,实现精准定位。这套方案也存在成本高的问题。
超声波雷达的方案,当前很多泊车辅助功能都在用。但问题在于,它探测距离最多只能到3米,精度也很低。
视觉定位的方案主要通过摄像头实现,它是目前自动驾驶技术中比较主流的定位方案。这套方案的主要优势为成本低、可以识别文字颜色和图案等。但是,视觉定位的效果会受到环境光线的影响,在雨雪、大雾的情况下,定位效果也比较差。
GNSS卫星定位和惯性导航在车载导航方面的应用比较多。关于GNSS定位,主要优势是成本低、精度高。目前,基于千寻位置提供的差分服务,GNSS定位可以达到动态厘米级。
业内经常使用惯性导航和GNSS做融合,因为结合了惯性导航后,在GNSS信号丢失的情况下,车辆依然能够准确定位。但是,由于惯性导航依靠推算实现,时间一长累计误差就会比较明显,并且它需要得到一个比较准确的初始位置才可进行推算,一般不会作为单独的导航传感器存在,往往要搭配其他的传感器使用。
以上几种传感器各具优势及缺陷,在实际应用过程中很难找到一个各方面都兼顾的最优方案。
三、高精度卫星定位在自动驾驶中的基础性作用
客观来看,卫星定位是可用性比较高的一种技术方案,此外,相比于其他的传感器,成本也比较低。
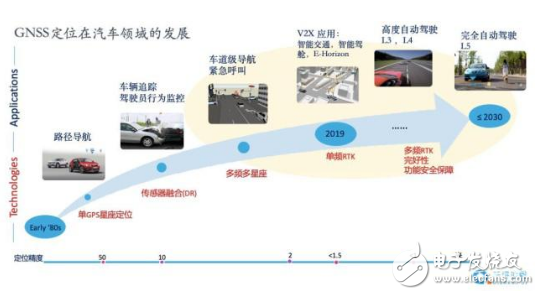
GNSS定位技术在汽车领域的应用由来已久。上世纪80年代,汽车的导航功能就是通过单GPS星座定位的方式来实现的,但由于可见卫星少,定位精度在50米左右;后来,引入惯性导航传感器,能够保证定位的连续性,精度在10米左右,可实现车辆轨迹追踪,以及基于轨迹做驾驶员行为的监控分析等功能;随着卫星星座的发展,现在天上已经有了四个主要的卫星星座,可用卫星数量增多,并且每一个卫星星座都有至少2~3个不同的频段,卫星定位的精度也提升到5米左右。
随着车辆V2X应用以及L3、L4、L5级别的自动驾驶的发展,汽车对定位精度的要求进一步提高——必须达到1.5米甚至1米以内,那么,如何才能实现呢?
这就需要引入单频RTK(载波相位差分)技术了。基于这种技术的定位,复杂环境下可达到1.5米精度;空旷环境下,可达到50~80厘米的精度。而到了L3级别的自动驾驶之后,就要用到多频RTK技术,将定位精度提升到厘米级。
那么,RTK到底是一种什么样的技术呢?
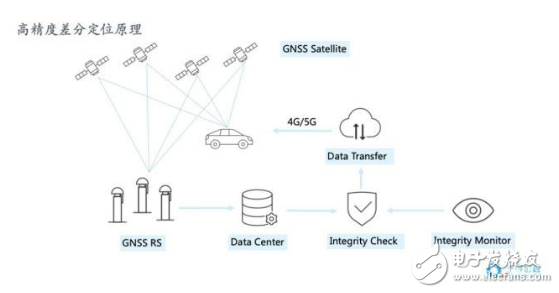
首先,简单讲讲RTK的定位原理。使用这项技术的一个大前提是在地面建设卫星观测站(也称“基准站”),它的位置信息是固定的、已知的,当它接收卫星信号后,便可得到一个卫星定位结果。卫星定位结果和它已知位置的差值就是卫星定位误差。这个误差结果可以通过网络播发的形式传输给周边的车辆,车辆定位系统减掉误差之后,就能得到一个高精度的位置信息了。
高精度GNSS定位不受环境影响,在雨雪天的道路、雾霾天的道路、无车道线的道路以及沙漠草原等其他定位传感器无法工作的场景下,它都能正常工作。
此外,高精度GNSS定位加高精度地图,也能实现很多智能驾驶辅助方面的功能,比如提醒司机前方有急转弯道、坡道、交叉路口,还有一些已知的事故点,带来更好的驾驶体验; 同时,相对于一些视觉的定位方案,高精度GNSS定位不需要下载很多的地图以及点云的数据,也不会消耗太多系统资源去做数据处理,计算成本低。
四、千寻位置高精度卫星定位产品介绍
目前,千寻位置的基准站网已经实现全球覆盖,基于这套站网系统,千寻位置高精度定位服务覆盖全国。在中国以外的地区,千寻位置使用星基增强技术可将精度提升到亚米级。
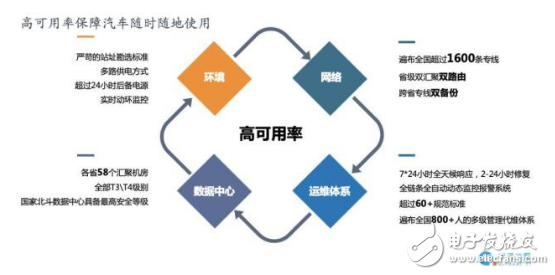
千寻位置还在环境、网络、运维体系和数据中心这四个环节,保障服务的高可用率,让汽车随时随地都能实现高精度定位。
基于全球基准站网及服务的高可用率,目前,千寻位置提供的高精度GNSS定位产品可以接管车端定位的全流程。在车辆首次定位时, FindNow加速定位服务可帮助车辆缩短首次定位时间,3秒钟就能帮助汽车得到初始位置信息;然后,地基差分服务FinM Pro 、FindCM,以及星基差分服务可以对初始位置进行差分改正校准;此外,千寻位置还提供FindV融合定位服务,可在复杂场景下,对汽车的定位数据进行纠偏;如果想要实现导航轨迹追踪,千寻位置还能提供位置数据服务FindS;而FindTrace则能提供地图轨迹纠偏服务,在制作地图的过程中,帮助升级地图的精度。

目前,千寻位置在汽车领域已经拥有了大量的生态合作伙伴。在芯片模组层,千寻位置与高通、u-blox、ST、华为、移远等企业,合作推出定位芯片产品;在方案融合层,千寻位置已经与博世、恒润、德赛、斑马、高德等企业建立合作。千寻位置在网联(connectivity)、自动驾驶(autonomous)和研发服务类(Intelligent Vehicle service solution)三个方向上,形成了8个解决方案,服务于主机厂和Tier1,帮助汽车厂商实现监控管理和汽车的自动驾驶功能。
-
汽车自动驾驶技术2016-04-14 5597
-
意法半导体推出世界首个定位精度达到自动驾驶级别且符合汽车安全标准的多频GNSS接收器2018-03-09 3819
-
硅谷组建团队、L3产品落地,想法多多的腾讯自动驾驶2018-11-13 3395
-
UWB主动定位系统在自动驾驶中的应用实践2018-12-14 3306
-
自动驾驶汽车的定位技术2019-05-09 3539
-
如何让自动驾驶更加安全?2019-05-13 3770
-
自动驾驶汽车的处理能力怎么样?2019-08-07 2920
-
UWB高精度定位在自动驾驶中的应用前景2020-10-26 2880
-
UWB定位可以用在自动驾驶吗2020-11-18 3688
-
高精度地图如何应用于自动驾驶系统2019-05-29 6474
-
复杂环境下的自动驾驶高精度定位技术2019-06-28 6332
-
高精度地图在自动驾驶中的应用优势是什么2019-12-04 6938
-
自动驾驶高精度定位技术企业导远电子获得国投招商投资2020-09-13 3768
-
GNSS高精度定位在自动驾驶领域的应用分析2022-08-05 2571
-
GNSS中高精度定位定向模组M20助力自动驾驶车辆精准定位2023-09-11 1722
全部0条评论

快来发表一下你的评论吧 !
