

基于单片机控制的自主寻迹电动小车的设计
电子说
描述
直道检测
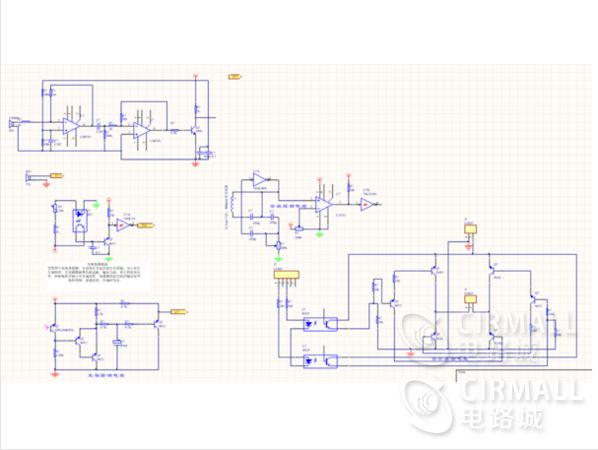
在小车的中部平行装有两个色标传感器,采用查询检测的方法对黑线进行检测。89C51在检测到黑线信号后,通过89C51的PI.5和Pl.6口得知是哪一个传感器检测到黑线,以此作为调整小车方向的基准。在程序方面,我们采用了差补控制算法。在校正服务程序中通过检测PI.5和Pl.6口的状态,运用差补算法,精确调节左右前轮的方向,达到使小车稳定沿黑线行走的目的。
为了保证程序的准确性,服务程序中设置了2重黑线检测,有效的防止了小车冲出跑道。在直道上的铁片,我们使用金属探测传感器来检测。通过计算小车开始检测到铁片与离开铁片时的圈数之差,乘以车轮的周长,我们可以得到铁片的长度以及铁片一半的长度,由此可以得到起跑线到铁片中央的距离。
当车轮转动时,安装在轮胎上的磁钢使霍尔元件产生电平变化。因此只需记录电平变化的次数,便能得到实际转速。为了提高准确度,减少误差,我们安装了两块磁钢。
转弯检测
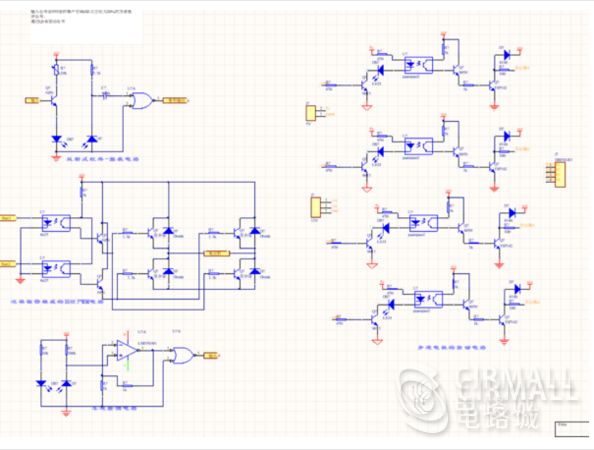
为了防止小车冲出跑道以及按照黑线转弯,需要在进人弯道之前降低速度。因此我们采用了高效的H型PWM电路调节转速。在进人转弯之前,我们通过提前减速程序使小车降低速度。通过跟随黑线行驶和检测最后一片铁片的位置,我们可以得到准确的停车位置和车头方向。在铁片上停留55的期间,驱动声光报警系统,发出声光报警信号;同时,由累计脉冲的总数便可得到全程行驶的时间。
障碍检测
首先我们通过寻找Zoow灯泡的光源,来校正小车的方向。然后通过超声波对障碍物进行距离检测,以此为基准,绕过障碍物。再通过检测光源找到小车与车库之间的距离,并由此引导小车准确进入车库。
结束语
从测试结果来看,PWM技术能够极大地提高电动机的驱动效率;双色标传感器解决了小车严格按照轨迹(黑线)运行的问题;超声波传感器能够精确测量小车与障碍物之间的距离,为躲避障碍物提供了较好的测量方法;霍尔传感器可精确测量运行中的转速。从运行情况看,采用本方案设计制作的智能小车,系统可靠性较高,运行稳定,定位准确,达到了设计要求。
-
基于单片机的寻光、寻迹小车设计2023-11-17 617
-
基于单片机寻迹小车电路设计资料包含原理图及程序文件2023-04-20 682
-
ATMEGA16单片机寻迹小车程序及其原理图下载2021-12-30 995
-
基于51单片机的自动寻迹小车控制的设计2021-07-22 1427
-
使用51单片机实现寻迹小车的程序2020-03-03 1477
-
设计使用单片机控制的自主寻迹电动小车的资料详细说明2019-08-30 1350
-
使用单片机进行自主寻迹电动小车的设计论文程序和电路图合集免费下载2019-06-05 1552
-
使用单片机控制的简易自动寻迹小车系统资料说明2018-12-11 1796
-
51单片机设计的智能小车如何控制小车寻迹和弯道转向的详细资料概述2018-07-27 4091
-
基于51单片机的智能小车(遥控模块寻迹避障)初学者参考2016-06-15 1136
-
单片机寻迹小车Microsoft PowerPoint 演示文稿2016-05-03 1065
-
单片机的智能寻迹避障小车设计2016-03-14 1115
-
基于单片机控制的自主寻迹电动小车的设计2013-12-25 326
全部0条评论

快来发表一下你的评论吧 !
