

汽车MEMS市场安装率节节攀升 汽车安全性能要求越来越高
电子说
描述
微机械(MEMS)是英文Micro Electro Mechanical systems的缩写,即微电子机械系统。微电子机械系统(MEMS)技术是建立在微米/纳米技术(micro/nanotechnology)基础上的 21世纪前沿技术,是指对微米/纳米材料进行设计、加工、制造、测量和控制的技术。它可将机械构件、光学系统、驱动部件、电控系统集成为一个整体单元的微型系统。这种微电子机械系统不仅能够采集、处理与发送信息或指令,还能够按照所获取的信息自主地或根据外部的指令采取行动。它用微电子技术和微加工技术(包括硅体微加工、硅表面微加工、LIGA和晶片键合等技术)相结合的制造工艺,制造出各种性能优异、价格低廉、微型化的传感器、执行器、驱动器和微系统。微电子机械系统(MEMS)是近年来发展起来的一种新型多学科交叉的技术,该技术将对未来人类生活产生革命性的影响。它涉及机械、电子、化学、物理、光学、生物、材料等多学科。
微机械陀螺即MEMS陀螺,也称为硅微陀螺,它的制作是通过采用半导体生产中成熟的沉积、蚀刻和掺杂等工艺,将机械装置和电子线路集成在微小的硅芯片上完成的,最终形成的是一种集成电路芯片大小的微型陀螺仪。所有的微机械陀螺都是非旋转装置,通过获取一个振动机械元件上的哥氏加速度效应,实现角速率检测。即一个验证质量在一个平面内做正弦振动,如果此平面以角速率Ω旋转,那么哥氏力就会使该质量以垂直于该平面的方向做正弦振动,其幅值正比于Ω。对哥氏力所引起的运动进行测量,就可获得Ω的信号,这就是微机械陀螺的基本工作原理。
传统机械陀螺仪主要利用角动量守恒原理,即:对旋转的物体,它的转轴指向不会随着承载它的支架的旋转而变化。MEMS陀螺仪主要利用科里奥利力(旋转物体在有径向运动时所受到的切向力)原理,公开的微机械陀螺仪均采用振动物体传感角速度的概念,利用振动来诱导和探测科里奥利力。
MEMS陀螺仪的核心是一个微加工机械单元,在设计上按照一个音叉机制共振运动,通过科里奥利力原理把角速率转换成一个特定感测结构的位移。以一个单轴偏移(偏航,YAW)陀螺仪为例,通过图利探讨最简单的工作原理。
两个相同的质量块以方向相反的做水平震荡,如水平方向箭头所示。当外部施加一个角速率,就会出现一个科氏力,力的方向垂直于质量运动方向,如垂直方向箭头所示。产生的科氏力使感测质量发生位移,位移大小与所施加的角速率大小成正比。因为感测器感测部分的动电极(转子)位于固定电极(定子)的侧边,上面的位移将会在定子和转子之间引起电容变化,因此,在陀螺仪输入部分施加的角速率被转化成一个专用电路可以检测的电子参数---电容量。
下图是一种MEMS陀螺仪的系统架构,,陀螺仪的讯号调节电路可以分为马达驱动和加速度计感测电路两个部分。其中,马达驱动部分是透过静电引动方法,使驱动电路前后振动,为机械元件提供激励;而感测部分透过测量电容变化来测量科氏力在感测质量上产生的位移。
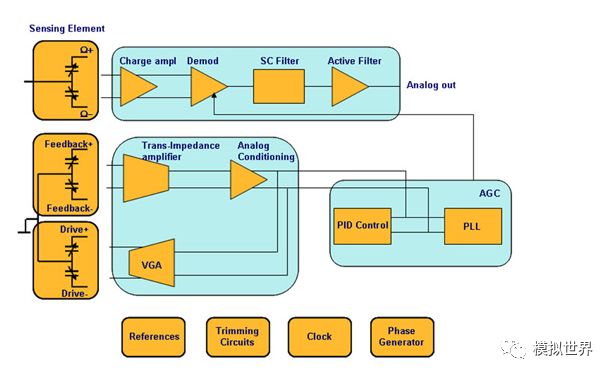
当然,MEMS陀螺仪还具有其它功能模块,比如自检功能电路,低功耗以及运动唤醒电路等等。
已进入实用的微机械陀螺主要存在以下三种不同结构:框架式角振动陀螺、音叉式梳状谐振陀螺和振动轮式硅微陀螺(见下图),这几种结构的陀螺当前精度已达到1度/小时的量级。
随着工艺的成熟,制造成千上万个硅微陀螺将与制造一个硅微陀螺一样的方便,这种大批量制造的特点使得硅微陀螺的生产成本大大降低,这是它的一个突出的优点。其他优点有:体积小,质量轻,功耗低,可靠性高,能承受高过载、高冲击等恶劣的动态环境。
MEMS传感器市场浪潮可以从最早的汽车电子到近些年来的消费电子,和即将来到的物联网时代。如今单一的传感器已不能满足人们对功能、智能的需要,像包括MEMS惯性传感器、MEMS环境传感器、MEMS光学传感器、甚至生物传感器等多种传感器数据融合将成为新时代传感器应用的趋势。
在车载导航中,使用的就是MEMS陀螺仪,用来测量车辆转角的角速度,并对时间进行积分得到车辆的角度变化,根据前一时刻的车辆方向来确定当前时刻车辆的行驶方向。
微机械陀螺仪用于测量汽车的旋转速度(转弯或者打滚),它与低加速度计一起构成主动控制系统。所谓主动控制系统就是一旦发现汽车的状态异常,系统在车祸尚未发生时及时纠正这个异常状态或者正确应对个异常状态以阻止车祸的发生。比如在转弯时,系统通过陀螺仪测量角速度就知道方向盘打得过多还是不够,主动在内侧或者外侧车轮上加上适当的刹车以防止汽车脱离车道。现在这种系统主要安装于高端汽车上。
目前在汽车MEMS市场,压力计和加速度计还是占较大份额,但是随着对汽车安全性能要求越来越高,尤其是在北美和欧洲稳定性主控系统的安装率节节攀升,陀螺仪的市场增长率明显比前两类要快,在2011年预期达到10%。
-
为何车载连接器的阻燃性要求越来越高?2021-05-31 2644
-
为什么Web前端工程师薪资越来越高?2020-06-18 2123
-
汽车侧向倾斜角度传感器是什么?2020-03-11 2532
-
云存储的普及度越来越高,它的安全性能如何2019-11-07 991
-
新能源汽车在市场的普及度越来越高2019-09-27 1306
-
汽车连接器端子怎么选择?2019-09-12 4405
-
未来芯片的发展对FPGA的要求将会越来越高2019-09-11 1217
-
如何利用嵌入式雷达技术提升汽车主动安全性?2019-09-02 1613
-
电子设备在汽车中的影响越来越大2019-07-26 2915
-
各国汽车安全性怎么测试2019-05-16 2322
-
在大屏电视越来越受青睐的今天 激光电视的市场占有率节节攀升2019-04-12 1542
-
国内新能源汽车的市场占有率越来越高 其售后问题也随之日益凸显2019-03-18 3134
-
汽车电子示波器介绍2016-10-14 3613
-
汽车电子中的2520贴片晶振2016-07-27 4101
全部0条评论

快来发表一下你的评论吧 !
