

自动驾驶走向产业落地的必由之路
描述
自动驾驶发展进程中,车端的智能化升级、路侧的数字化改造、芯-路-云的深度协同是自动驾驶走向产业落地的必由之路。
——从SAE2019NEICV看自动驾驶产业落地途径
自动驾驶发展进程中,车端的智能化升级、路侧的数字化改造、芯-路-云的深度协同是自动驾驶走向产业落地的必由之路。
完成车端智能化升级,安全可靠的计算平台方案、优化变革的电子电气架构、回归价值的座舱环境设计是三个关键的落地支撑。开展路侧数字化改造,可为车辆补充具备上帝视角的全新感知维度、为监管机构提供优化交通运营的重要抓手。在此基础上,实现车与车、车与路之间“芯-路-云”的深度协同,还依赖于前后端设备的智能网联与后端系统的多云融合。
在日前召开的SAE 2019新能源与智能网联汽车技术大会(SAE 2019 NEICV)中,嘉溢创投和同济校友产业创新联盟作为大会特别支持方,深度参与到大会筹备和“芯-路-云”议题策划中,也就智能网联汽车的产业落地途径贡献了自己的思考。
单车智能遇瓶颈,车路协同引关注
在自动驾驶产业落地过往的进程中,国内外产业界之前更多依托其在汽车感知、决策、控制和执行方面的技术积累,推动单车智能的发展。然而,随着人们越来越多地意识到单车智能在处理Corner Case、成本控制和可量产方面的局限,车路协同智能逐渐引起产业广泛关注。
2018年,车路协同的提法跃入公众视野,并逐渐成为一种V2X技术商业落地的重要途径。V2X和自动驾驶是强相关的两个技术体系,V2X可以在感知层面、甚至决策规划层面从技术上帮助自动驾驶突破诸多现有障碍;随着5G的分阶段产业落地,通信网络的可靠性提升、时延降低、带宽提升、速率提升;在企业和监管机构的联合推动下,车路协同有望在提升交通运行效率、提升汽车驾驶安全层面发挥重要作用。V2X 技术的商业化阻碍将变得越来越小。
车端智能化升级的关键支撑
完成车端智能化升级,安全可靠的计算平台方案、优化变革的电子电气架构、回归价值的座舱环境设计是三个关键的落地支撑。
实现智能网联汽车的自动驾驶,主体是智能的、网联的汽车,未来包含智能网联汽车的智能交通系统,一定是单个个体在限定区域具备较高智能水平的分布式智能系统,而非集中式智能系统。车端的智能化升级,是智能网联汽车发展首要任务。十年来在Waymo为首的科技公司推动下,单车智能发展到了较高的水平,然而在感知、决策和执行层面仍存在较多瓶颈。如何在有限的时间、空间、资源和成本约束下,完成设计指标、实现软件功能、交付安全可靠且便捷舒适的产品和服务,成为智能汽车落地量产最大的考量。
① 安全可靠的计算平台方案是车端智能化升级产业落地的关键支撑。
在SAE 2019 NEICV上,来自英伟达(Nvidia)的自动驾驶业务高级经理朱力先生重点介绍了公司车载计算平台。公司产品DIRVE AGX Xaiver/Pegasus算力强大,可对车道线、标志、各类道路参与者进行实时的识别、分割、追踪,感知效果强大;此外产品开发流程已经符合ISO26262的功能安全标准。
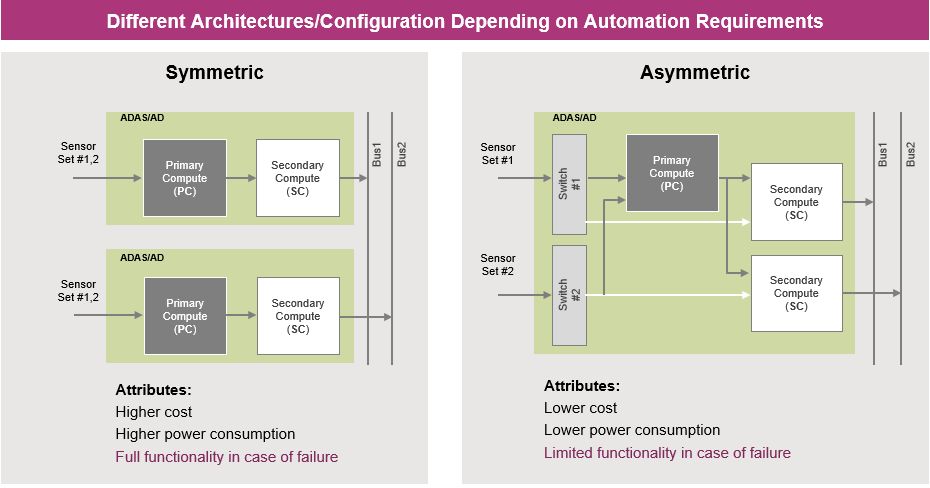
此外,来自英飞凌(Infineon)的高级项目经理Kevin Wu介绍了公司多款将于2022年量产的传感器融合解决方案。英飞凌强调,在较低级别的辅助驾驶领域,汽车感知融合与计算系统仍可采用非对称的失效保护架构(Fail-Operational Architectures);而到了L4/L5级别,对称架构必不可少,保证即使在一套感知/计算系统失效的情况下,也能够有一个紧急的冗余后备方案以最高的速度提供支持,才能真正保证系统安全可靠。
② 优化变革的电子电气架构是车端智能得以走向量产的另一个关键要素。
来自安波福(Aptiv)的亚太地区汽车网联与信息安全事业部总监倪志刚先生介绍了安波福最新的面向Zone的智能汽车电子电气架构。该架构可以在5G环境下支持L3以上自动驾驶,以Zone为主干节点,提供更安全可靠的网络架构,同时简化整车电气设计复杂度,降低综合连接成本。
③ 回归价值的座舱环境设计是智能汽车是否能被市场、被用户接受的先决条件。
来自泛亚汽车的总工程师张健琼女士分享了自己多年汽车座舱设计的方法论思考,她提出,智能座舱的核心价值依次是安全可靠、实用舒适、便捷服务。一切座舱布局、人机交互、座舱服务的设计均应该围绕核心价值展开,智能化的技术应该在提升核心价值的效率的基础上,再考虑额外的添砖加瓦。
路侧数字化改造的落地实践
开展路侧数字化改造,可为车辆补充具备上帝视角的全新感知维度、为监管机构提供优化交通运营的重要抓手。
仅从单车智能的角度,实现L3以上的自动驾驶量产依然任重道远。以路为核心的基础设施数字化改造是加速智能网联汽车产业落地的重要方面。
一方面,路侧数字化改造可为车辆补充具备上帝视角的全新感知维度。目前的车端感知技术覆盖的区域最远为200-300米,且无法有效感知视界之外的区域。路侧的数字化改造可辅助汽车的环境感知和定位,有效延伸汽车感知的维度和范围,协助汽车开展路径规划。另一方面,路侧数字化改造有助于对基础设施开展主动控制与管理,在关键路段和特定场景辅助车辆编队同行,提高道路交通运营效率。
长城汽车技术中心智能系统开发部主管张瀛博士从OEM的视角,分享了长城在自动驾驶车辆平台和5G智能网联示范区方面的研发、建设和落地工作。长城重视车端智能的发展,也发力智慧交通建设,将“人-车-路”一体的智能交通系统建设作为未来发展方向。
值得关注的是,高精地图作为路侧数字化的一种表现形式,已经在自动驾驶中得到广泛应用,据晶众地图副总裁杨柯先生分享,晶众作为最新一家获得甲级测绘资质的高精地图提供商,有能力快速低成本交付城市级高精地图和停车场高精地图,公司基于高精地图在自动驾驶和自动代客泊车领域快速获取市场、业务迅猛爆发。
实现车与车、车与路之间“芯-路-云”的深度协同,依赖于前后端设备的智能网联与后端系统的多云融合。
① 智能网联是打通车载计算平台、路侧数字化设备、后台云端系统的信息交互渠道,是车路协同走向落地的枢纽桥梁。
② 除了智能网联,汽车、道路和管理运营不同环节的后端系统的云化和多云融合也是促进“芯-路-云”深度融合、自动驾驶产业落地的关键一环。
DaoCloud联合创始人/CTO郭峰先生分享了公司基于人工智能云原生能力的汽车行业数字化实践,DaoCloud可基于容器技术,为各行业客户提供可组合、可移植、可扩展的算力支持,这对多云融合、自动驾驶衍生业务的快速部署至关重要。
在智能网联分论坛“芯-路-云”板块的最后,嘉溢创投合伙人盛雷先生策划并主持了“芯-路-云,车路协同的产业落地途径”专家论坛,就单车智能/车路协同自动驾驶技术路径选择、车路协同落地障碍、商业变现模式等开展了深度探讨。
① 首先,关于单车/协同智能的技术路径选择,论坛嘉宾达成共识:要实现自动驾驶,基于智能网联的车路协同必不可少。
英伟达朱力先生认为,车端传感器的增加对于提高自动驾驶的性能的贡献会慢慢趋于平缓,车路协同必然是未来的趋势;英伟达作为芯片的提供商,产品会覆盖车端和云端。
长城汽车张瀛博士以“长城汽车国家智能汽车与智慧交通(京冀)示范区”为例,展示了长城在车路协同领域的尝试。
图森未来副总经理薛健聪先生认为,在无人驾驶货运领域,海外法规体系相对宽松,便于研发和测试的开展;而国内现阶段法规严厉、市场主体尚不明确、行业标准尚未形成;然而近期监管姿态频现利好、示范区建设卓有成效,一旦时机成熟,基于车端智能和V2X技术的自动驾驶有望在无人驾驶货运领域率先实现大规模推广应用。
苏州工业园区交警大队智能交通负责人束云峰队长首先指出,在园区的智能交通示范区项目,和汽车与交通相关的各个产业参与方都参与其中。交警部门作为交通系统的监管机构,有天然的统筹各方协调调度的优势,用交警部门作为智能交通项目的居中管理者,有助于推进智能交通项目试点的顺利落地,也有利于项目走出试点、全面走向社会后与社会交通管理体系无缝衔接。
② 车路协同要顺利落地,需要先克服哪些障碍呢?
同济大学杜老师认为主要障碍在于监管政策,中移智行任总认为在于尚不明晰的商业模式,图森薛总认为在于缺少足够的长距离公路测试场景,长城王博认为主要障碍在于单车与网联技术均未成熟。
③ 对于车路协同的商业模式,不同的参与方关注不同的价值变现环节。
英伟达聚焦于车端和云端计算平台的销售,长城关注新一代智能网联汽车的销售,图森专注提供车队无人货运服务,杜老师关心特定场景如港区高速的货车编队自动驾驶以及固定高速路线虚拟轨道的超短车头间距“车列”客运,中移智行则强调景区为代表的低速场景的率先落地。
盛雷先生在最后对专家们的宝贵观点做了回顾。他总结道,围绕芯-车-路-云的产业闭环和政-产-学-研-投的生态闭环开展的专家论坛,基本勾勒出了自动驾驶借助车路协同手段加速落地的演进方向和产业路径。
在SAE 2019 NEICV,与会专家还就新能源汽车关键产业环节、汽车软件操作系统、汽车信息安全及汽车测试与评价标准等诸多方面开展了深度探讨。而在关键的智能网联领域,一个广泛的产业共识正在形成,那就是在自动驾驶发展进程中,车端智能与车路协同智能两者均不可偏废,车端的智能化升级、路侧的数字化改造、芯-路-云的深度协同是自动驾驶走向产业落地的必由之路。
-
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?2016-07-05 14304
-
自动驾驶真的会来吗?2016-07-21 14569
-
自动驾驶的到来2017-06-08 7462
-
浅析自动驾驶发展趋势,激光雷达是未来?2017-09-06 5519
-
迈向自动驾驶和电动汽车之路研讨会2018-10-25 3150
-
硅谷组建团队、L3产品落地,想法多多的腾讯自动驾驶2018-11-13 3393
-
中国自动驾驶行业前景看好,国产技术迅速发展2019-04-03 3133
-
如何让自动驾驶更加安全?2019-05-13 3758
-
自动驾驶汽车的处理能力怎么样?2019-08-07 2917
-
网联化自动驾驶的含义及发展方向2021-01-12 4941
-
汽车自动驾驶产业链深度研究报告:自动驾驶驶向何方 精选资料分享2021-08-27 2983
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 2462
-
这四个关于自动驾驶的误解,将影响自动驾驶的推广和落地2020-10-14 3347
-
聊聊自动驾驶技术的商用化落地和自动驾驶技术落地的人才培养2022-06-17 3314
-
自动驾驶落地技术分析 自动驾驶落到典型应用领域2022-09-27 1875
全部0条评论

快来发表一下你的评论吧 !
