

你知道机器人的详细资料吗
电子说
描述
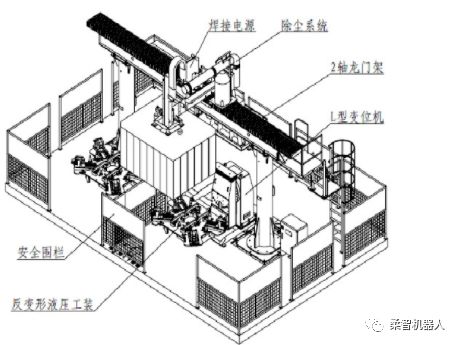
KUKA机器人焊接系统
主要包括
机器人系统
焊接系统
周边设备
安全设备
其他附件组成
机器人系统包括机器人本体、机器人控制柜及示教盒组成。
机器人C4控制柜系统内部概览
1.电源滤波器2.总开关3.CSP4.
控制系统PC机5.驱动电源(轴7和8的
驱动调节器选项)6.4至6号轴驱动调|
节器7.1至3号轴驱动调节器8.制
动滤波器9.CCU 10.SIB/SIB扩展
型11.保险元件12.蓄电池13.|
接线面板14.滚轮安装组件(选项)
19.库卡smartPAD
1接线板11CSP
2蓄电池12控制系统PC机
3保险元件Q313制动滤波器K2
4保险元件Q1314驱动电源KPPG1
5总开关15驱动调节器KSP T1
6内部风扇16驱动调节器KSPT2
7驱动调节器KSPT12 17 SIB/SIB扩展型
8驱动调节器KSPT11 18CCU
关节坐标系
ROBROOT坐标系是一个笛卡尔坐标系,固定位于机器人足部。它可以根据世界坐标系说明机器人的位置。
在默认配置中,ROBROOT坐标系与世界坐标系是一致的。用$ROBROOT可以定义机器人相对于世界坐标系的移动。
机器人的运动方式
KUKA机器人有PTP(点到点)、LIN(直线)、CIRC(圆弧)、样条运动四种基本的运动方式。
3.4.11)点至点(PTP)运动方
式
机器人沿最快的轨道将
TCP、TCP引至目标点。一般情
…一P2况下最快的轨道并不是最短P1.
的轨道,也就是说并非直线。因为机器人轴进行回转运动,所以曲线轨道比直线轨道进行更快。无法事先知道精确的运动过程。
轨迹逼近
轨迹逼近的意思是:将不会精确移至程序编定的点。圆滑过渡是一个选项,可在进行运动编程时选择。当在运动指令之后跟着一个触发预进停止的指令时,无法进行圆滑过渡。
PTP运动时的轨迹逼近TCP离开可以准确到达
目标点的轨道,采用另一条更快的轨道。进行运动编程时将确定至目标点的距离,TCP最早允许在此距离处离·P2开其原有轨道。
当发生轨迹逼近的PTP运
P3动时,轨迹曲线不可预见。P1而且,滑过点在轨道的哪一
侧经过也无法预测。
寻位的原理:
当运行寻位语句时,寻位功能打开,当焊丝碰到工件时,RDC内部继电器线圈得电,其对应的常开闭合,快速测量通道导通,并机器人记录当时的空间坐标。当焊丝用同样运动参数去接触第二、第三工件时,机器人会记录第二、第三个工件的空间坐标,并且可以计算出实际位置相对于示教位置的偏移量,并补偿偏移自动地变更机器人路径,从而保证准确找到焊缝。
寻位注意事项
(1)保持工件表面清洁,不要有油污或油漆(2)保证干伸长一致
(3)正确设置向量的起始点和查找点的位置(4)将查找距离、寻找速度、返回速度设为合适的值(5)查找完、修正后要将向量关闭,注意赋值的对象和位置
(6)修改点位置时,注意点上是否带有向量(7)使用联动时,注意base的选用,双工位时注意base号的选择
(8)搜寻点和焊缝点必须保证是不变的相对位置关系
系统日常维护保养
一.日检查及维护
1.送丝机构。包括送丝力距是否正常,送丝导管是否损坏,有无异常报警。
2.焊接过程中检视导电嘴是否磨损过大,是否需要更换。
3.气体流量是否正常。
4.检查平衡吊拉力是否足够。
5.水循环系统工作是否正常。
6.每班交接时通过cal-tcp程序检查TCP精度。
7.每60分钟手动清理喷嘴内部的焊渣。
- 相关推荐
- 热点推荐
- 机器人
-
哪位大神有ASIMO机器人的详细资料啊?2015-01-23 5683
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4118
-
家庭智能小管家机器人资料分享!2019-10-09 3653
-
工业机器人配件选型手册的详细资料概述(免费下载)2018-06-08 1546
-
检索式智能对话机器人开发实战案例详细资料分析概述2018-08-02 1902
-
ABB机器人操作培训手册详细资料免费下载2018-11-13 4575
-
机器人设计教程之机器人传感子系统的详细资料概述2018-12-25 1912
-
工业机器人导轨的3D模具图详细资料免费下载2019-04-22 1473
-
使用51单片机设计六足仿生机器人的详细资料说明2019-07-03 1559
-
双足机器人STL 3D模型详细资料合集免费下载2019-04-29 2141
-
库卡机器人模拟量输入输出编程的详细资料概述2019-07-20 8490
-
工业机器人的详细资料和应用编程等培训资料概述2019-10-31 1935
-
机器人如何从各轴角度算出当前XYZ详细资料说明2020-03-24 4227
-
FANUC机器人的信号地址表详细资料说明2020-04-29 2759
-
工业机器人的机械系统详细资料说明2020-06-04 2142
全部0条评论

快来发表一下你的评论吧 !
