

自动驾驶技术IMU的基础知识和应用场景
电子说
描述
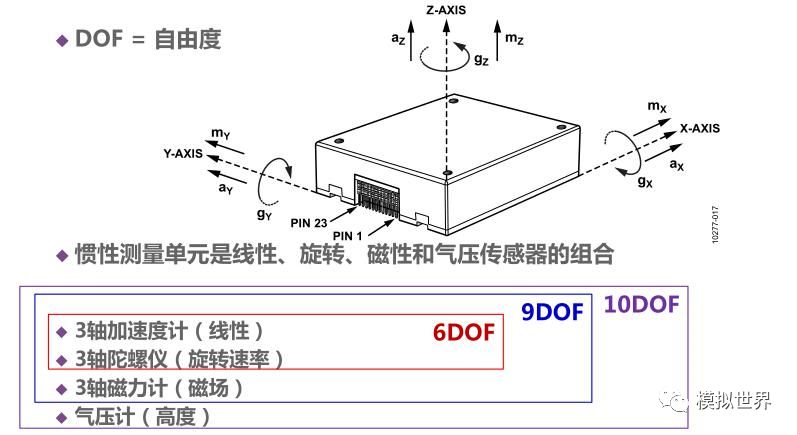
前面我们介绍了MEMS 陀螺仪的一些基本概念,也说明了陀螺仪和加速度计是构成IMU惯性测量单元的主要部件。在查找IMU的过程中,我们经常会看到DOF,自由度的概念,今天我们就从DOF开始进一步理解IMU的基础知识和应用场景。
想象一个笛卡尔坐标系,形下图所示,具有x轴、y轴和z轴,传感器能够测量各轴方向的线性运动,以及围绕各轴的旋转运动。这就是所有惯性测量单元的根本出发点,所有惯性导航系统都是据此而构建。
这些器件带有一个三轴加速度计,显然这是指x轴、y轴和z轴。加速度计会测量线性速度的变化,也会响应重力。加速度计会根据其方向而对重力作出响应,如下图所示,这使得我们能够基于非常简单的三角公式估算其方向。利用arcsin公式,我们可以使用一个轴,而利用arctan公式,我们可以将笛卡尔坐标系中两个彼此正交的轴合并。二者的主要区别在于:arcsin方法能够测量+/- 90度,而arctan方法能够测量+/- 180度,也就是全部360度,这样您将知道您在哪一个象限。
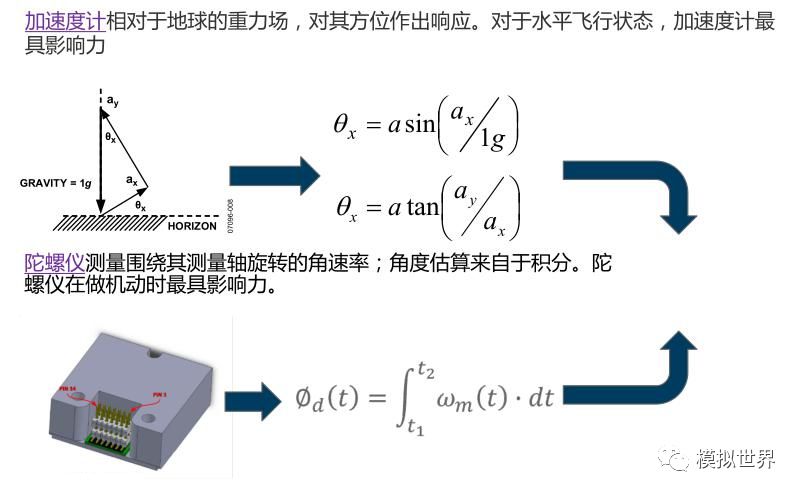
陀螺仪对旋转角速率进行积分,您就能估算角位移。大致上说,加速度计具有很好的长期偏置稳定性和长期精度,但会对线性振动作出响应。当进行角度估计时,线性振动会表现出来,有时候需要滤波,这会给其他方面带来负担,或者有时候振动太高,超出加速度计测量范围,从而完全破坏角度估计。
因此,陀螺仪没有对线性振动的一阶响应,但因为它对输出进行积分,所以任何偏置误差都会转换为角度估计的漂移。任何系统的基本调整空间在于使用此类传感器的根本出发点。加速度计的长期稳定性更好,但易受振动影响。陀螺仪不易受振动影响,但长期稳定性较差,会导致估算更快地漂移。
IMU应用实例之工业检查系统
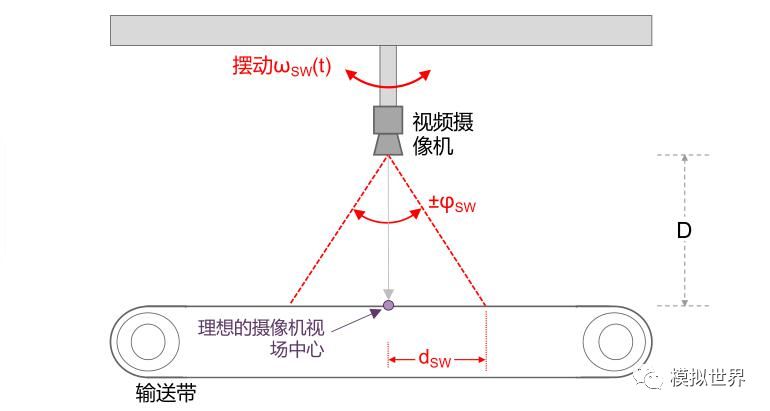
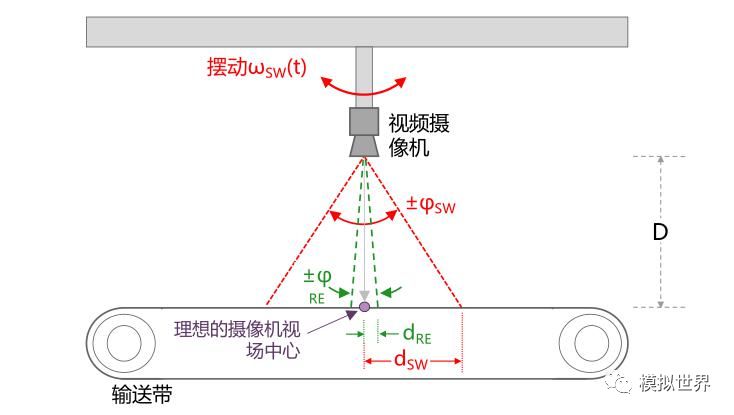
想象屏幕上方的灰色条是生产车间的天花板。天花板安装了某种摄像或照相设备,该设备检视其视场下方的生产线中的物件。再想象某个东西进入视场,停留适当的时间以供拍照,然后移动到工艺的下一部分。摄像头的目标是在检视对象上分辨出特定物理属性。很显然,它离地必须足够高,以便其视场能涵盖整个对象,但又不能过高以致图像失真。在此类场景中,工厂中的叉车、大量人员和其他机械的行走会引起此类设备摆动,下图中的红色虚线反映了这种情况,摆动的最大角度用希腊字母φ加下标SW表示。
下图中所示的情况与实际发生的情况相比有些夸大,但把虚线端部与理想的摄像机视场中心相比较非常重要,因为在这个特定应用中,失真可以与线性位移联系起来,也就是底部的变量dsw。最终,该检查系统的质量取决于您能把dsw和φsw项缩小到什么程度。
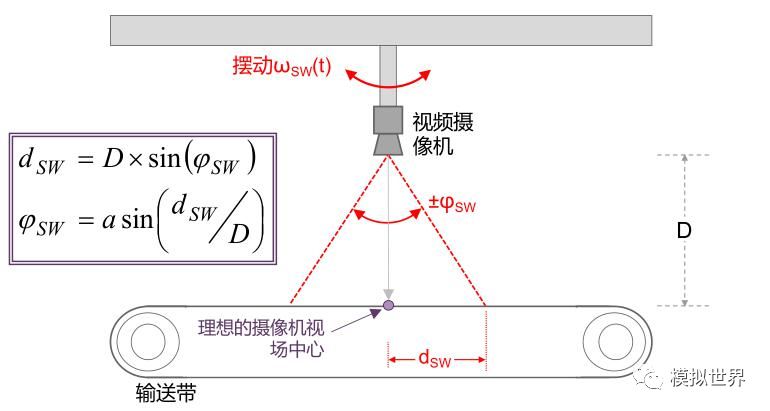
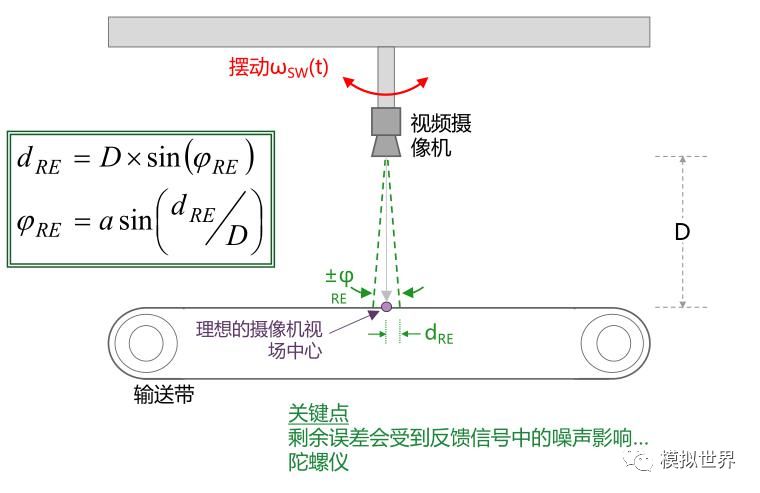
知道该类运动存在并考虑物理位移与实际角度摆动位移之间的简单几何关系,您就可以把它表示成物理术语,并与系统的实际参数联系起来。
假设检查一块塑料,要求它恰好为12英寸长,误差为+/-0.5英寸。因此,摄像机视场的分辨率必须在0.5英寸以内,由此可以反推出摄像机平台的实际角度精度要求。
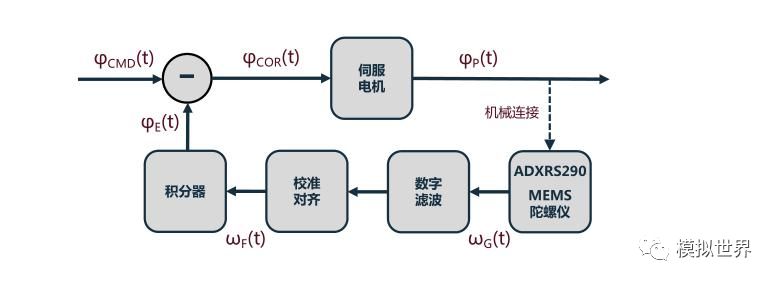
运动控制涉及各种各样的应用。假设把摄像机,也就是摄像机上的实际成像元件,放在一个小型伺服电机上,它将能抵消摆动效应。当摄像机向左摆动时,伺服电机向右摆动,这样,接收物件表面光线的成像元件实际上没有运动,图像就不会失真。这就是成像稳定技术,现在已经相当普遍。过去它只用在高端摄像机上,现在由于MEMS技术,大量数码摄像机也已采用。这是一个工业应用示例,它有不同的误差源需要考虑,但原理非常简单。使用MEMS陀螺仪测量运动,然后经过一系列数字信号处理,包括滤波、校准和积分,以便估计摆动角度,让伺服系统知道要往回摆动多远。这就是所谓闭环系统。
了解这些之后,对于此类系统,我们就能知道这些误差源对系统性能会有什么样的影响。再看原图,实际上添加了两条绿色虚线,这个窗口要窄得多。红线反映系统中实际发生的情况,绿线告诉我们控制系统稳定摄像机的效果。
有了这些物理参照之后,为了使它有效,陀螺仪性能必须达到什么程度?回到之前的公式,不过现在是应用于绿线,它代表执行校正之后或控制环路全面运行之后的残余误差。在这张图片中,最重要的一点是它让我们能将系统的物理参数与传感器指标联系起来。如今的运动控制系统设计师必须不断地考虑物理行为与传感器特性两方面,只有这样才能作出最恰当的决策。不仅是设计产品,甚至还要考虑概念和架构决策,需要从何种等级的传感器开始以便成功实现特定应用。此类考虑常常是富有成效的,因为它能帮助您从一开始就找准设计思路。
我们都想要成本低至1美元、功耗只有1微安而且终身都保持最高精度的传感器。但现实是,利用目前的技术无法制造出这样的产品。现有解决方案的成本从不到1美元到10万美元不等。对于手头的设计任务,从一开始就要考虑寻找最合适的传感器。上面提到过,关于运动检测器件,最令人激动的地方是我们能亲眼看到它。我可以在桌面上推动玻璃杯,我可以转动我的座椅,这些都可以同我每天都要打交道的东西联系起来,显然很有帮助。
现在看一个真正重要的参数,并了解陀螺仪是如何规定的。IEEE规范通过许多方式来量化噪声,但对于这个特定应用,最合适的方式是查看角向随机游动。蓝色虚线显示的是误差相对时间的累积。对于我们的摄像或成像系统,您可以确定图像捕捉时间d有多长?它是否意味着快门打开的时间?它是否意味着器件停止以供摄像的时间?
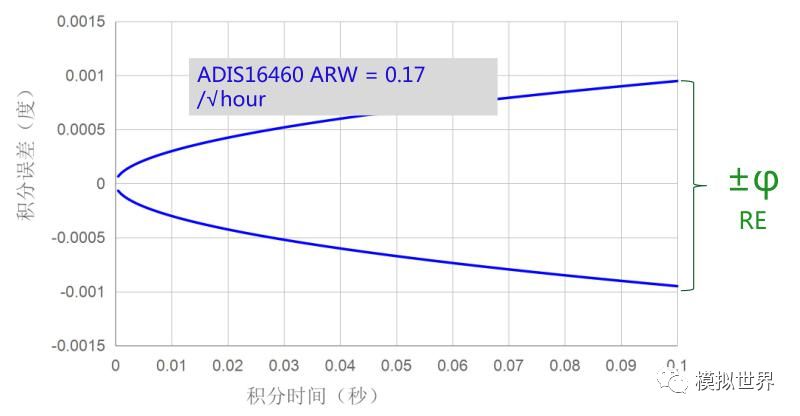
您可以通过多个方面来把我们的应用与此类指标联系起来,这样我们就可以开始估计,在我们的时间范围内,其摆动幅度有多大?在这个特定情形中,快门开启时间为0.1秒或100毫秒,对应的误差小于0.001度。
-
FPGA在自动驾驶领域有哪些优势?2024-07-29 8153
-
汽车雷达回波发生器的技术原理和应用场景2024-11-15 4536
-
谷歌的自动驾驶汽车是酱紫实现的吗?2011-06-14 4793
-
汽车自动驾驶技术2016-04-14 5567
-
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?2016-07-05 14196
-
自动驾驶真的会来吗?2016-07-21 14473
-
细说关于自动驾驶那些事儿2017-05-15 7157
-
自动驾驶的到来2017-06-08 7426
-
自动驾驶安全保驾护航的三个关键技术2018-10-30 2768
-
自动驾驶汽车的定位技术2019-05-09 3487
-
如何让自动驾驶更加安全?2019-05-13 3723
-
转发:聊聊边缘计算在自动驾驶中的应用场景2020-07-21 4930
-
网联化自动驾驶的含义及发展方向2021-01-12 4914
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 2422
-
自动驾驶技术的实现2021-09-03 3205
全部0条评论

快来发表一下你的评论吧 !
