

多路模拟开关的选择注意事项
模拟开关
描述
多路模拟开关的选择注意事项:
1.性能指标 模拟开关由于采用的是集成MOS管作为开关的器件实现开关功能;由于MOS管自身物理特性,在使用的时候需要注意一下几个性能指标:
2.开关速度: 模拟开关的开关速度一般能达到兆Hz的速度,可以快速实现链路切换。
3.开关耐压: 模拟开由于其应用的信号链路为*板低压工作环境,关耐压值一般在15v以内;常见的有3.3v、5v、12v、15、等最大耐压值;选择时必须注意信号链路的最大电压与器件最大耐压值。
4.开关最大电流: 模拟开关的导通能够承受的最大电流值,现在常见的模拟开关的开关最大电流一般在几百毫安以内;安培级别的模拟开关很少。
5.导通电阻: 常见的模拟开关的导通阻抗一般从几个欧姆到100欧姆之间;在模拟信号和弱信号设计的时候使用模拟开关必须注意这个参数。
6.关断阻抗: 关断阻抗代表着开关的关断能力,关断好坏,一般产品的关断阻抗足以达到抑制相邻两个信号链路相互干扰的能力。
集成多路模拟开关(以下简称多路开关)是自动数据采集、程控增益放大等重要技术领域的常用器件,其实际使用性能的优劣对系统的严谨和可靠性重要影响。 关于多路开关的应用技术,些文献上介绍有两点不足:一是对器件自身介绍较多,而对器件与相关电路的合理搭配与协调介绍较少;二是原则性的东西介绍较多,而操作性的东西介绍较少。研究表明:只有正确选择多路开关的种类,注意多路开关与相关电路的合理搭配与协调,保证各电路单元有合适的工作状态,才能充分发挥多路开关的性能,甚至弥补某性能指标的欠缺,收到预期的效果。本文从应用的角度出发,研究多路开关的应用技巧。目前市场上的多路开关以 CMOS 电路为主,故以下的讨论除特别说明外,均针对这类产品。
集成多路模拟开关的应用技巧
1 “先断后通”与“先通后断”的选择
目前市场上的多路开关的通断切换方式大多为“先断后通”(Break-Before-Make)。
在自动数据采集中,应选用“先断后通”的多路开关。否则,就会发生两个通道短接的现象,严重时会损坏信号源或多路开关自身。然而,在程控增益 放大器 中,若用多路开关来改变集成运算放大器的反馈电阻,以改变放大器的增益,就不宜选用“先断后通”的多路开关。否则,放大器就会出现开环状态。放大器的开环增益极高,易破坏电路的正常工作,甚至损坏元器件,一般应予避免。
2 选择合适的传输信号输入方式
传输信号一般有单端输入和差动输入两种方式,分别适用于不同的场合。
单端输入方式如图1所示,即把所有信号源一端接同一信号地,信号地与ADC等的模拟地相接,各信号源的另一端分别接多路开关。图中Vs为传输信号,Vc为系统中的共模干扰信号。
6
图1(a)接法的优点是无需减少一半通道数,也可保证系统的共模抑制能力;缺点是仅适用于所有传输信号均参考一个公共电位,且各信号源均置于同样的噪声环境下,否则会引入附加的差模干扰。
图1(b)接法适用于所有传输信号相对于系统模拟公共地的测量,且信号电平明显大于系统中的共模干扰。其优点是可得到最多的通道数,缺点是系统基本失去了共模抑制能力。
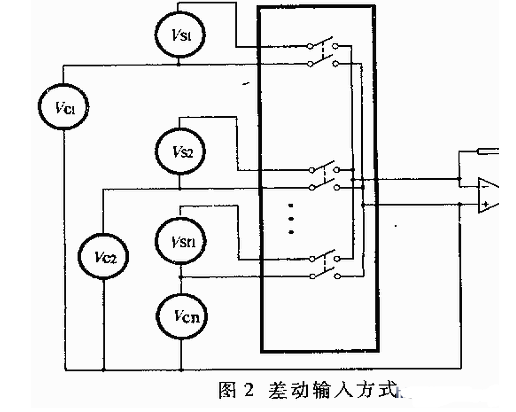
差动输入方式如图2所示,即把所有信号源的两端分别接至多路开关的输入端。其优点是抗共模干扰的能力强,缺点是实际通道数只有单端输入方式的一半。当传输信号的信噪比较低时,必须使用差动输入方式。
3 减小导通电阻的影响
多路开关的导通电阻RON(一般为数10Ω至1kΩ左右)比机械开关的接触电阻(一般为mΩ量级)大得多,对自动数据采集的信号传输精度或程控制增益放大的增益影响较明显,而且RON通道随电源电压高低、传输信号的幅度等的变化而变化,因而其影响难以进行后期修正。实践中一般是设法减小RON来降低其影响。
以CD4051为例,测试发现[1]:CD4051的RON随电源电压和输入模拟电压的变化而变化。当VDD=5V、VEE=0V时,RON=280Ω,且随V1的变化突变;当VDD》10V、VEE=0V时,RON=100Ω,且随V1的变化缓变。可见,适当提高CD4051的VDD有利于减小RON的影响。必须注意:提高VDD的同时,应相应提高选通控制端A、B、C的输入逻辑电平。例如:取VDD=12V(VEE=0V),可采用电源电压上拉箝位的方法,上拉电阻的阻值取1.5kΩ以上,使选通控制端信号的有效高电平不低于6V。这样,既保证CD4051理想导通(RON小,又实现了CMOS电平与TTL电平的转换(μP一般为TTL电平)。
可见,根据具体情况,适当提高多路开关的电源电压,是降低其RON影响的一种有效措施。此外,适当提高电源电压,还可以同时减小导通电阻路差ΔRON和加快开关速度。
4 消除抖动引起的误差
和机械开关类似,多路开关在通道切换时也存在抖动过程,会出现瞬变现象。若此时采集多路开关的输出信号,就可能引入很大的误差。例如[2]:某计算机自动数据采集与处理系统采集三个模拟量:水泵转速、流量、压力。三个模拟量对应的TTL电平分别为:1.5454V,1.5698V、2.9394V。采集系统从通道1、2、3分别对这三个模拟量连续采集10次,采集结果位于1.8554~1.8603、1.5625~1.5673、1.62207~1.62695之间,其中1、3、通道的误差很大。研究发现,这种误差是由于系统在多路开关通断切换未稳定下来就采集数据造成的。
消除抖动的常用方法有两种:一是用硬件电路来实现(硬件方法),即用RC滤波器除抖动;另一种是用软件延时的方法来解决(软件方法)。在有μP的系统中,软件方法较硬件方法更显优势。如上例中,只要在原QuICkB ASIC 数据采集程序加入一循环语句来适当延时,则采集结果位于1.5454~1.5478、1.5698~1.5722、2.9394~2.9418之间,采集精度明显提高,采集结果正常。
5 提高切换速度
多路开关的切换速度与其自身的结构、工作条件以及外电路的情况都有关系。在实践中应注意以下几点:
所有的多路开关的平均传输延迟时间tpd均随VDD的升高而减小。以CD4051为例[3],当VDD=5V时,tpd=720ns;当VDD=10V时,tpd=320ns;当VDD=15V时,tpd=240ns。可见,适当提高多路开关的电源电压,可加快其开关速度。
传输信号的信号源内阻Rs对多路开关的切换时间有重要影响。分析表明:在其它条件不变的情况下,切换时间近似与Rs成正比,即Rs越小,开关的动作就越快。所以,对高内阻的信号源(一些传感器就是如此),宜用阻抗变换器(如电阻跟随器),将阻抗变低后再接入多路开关。此外,减小Rs还可同时减小多路开关的关断漏电流造成的误差。
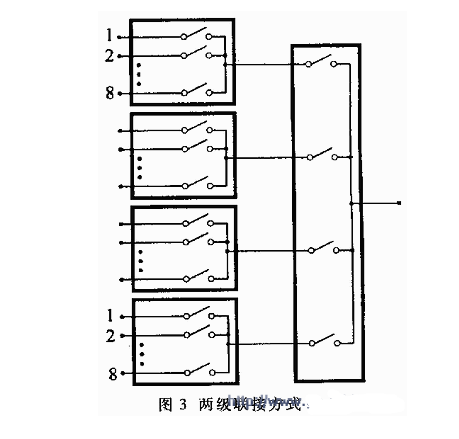
当系统需要的信号通道数较多时,宜采用图3所示的两级联接方式。在图3 中,假设系统共需要32个信号通道,将这32个通道分成4组,各组分别接至4个二级开关,信号由二级
开关输出。设每个开关的输出电容为C0,则输出总电容由32Co至大约12Co,电路的时间常数减小,开关速度提高。此外,这种联接方式还可以使多路开关的总关断漏电流由31Iz降至大约10Iz(设每个开关的关断漏电流为Iz),从而减小关断漏电流造成的误差。对上述两种作用,通道数越多效果越显著。当然,这种联接方式需要的开关数相对多些,选通控制也相对复杂些,因而主要用于信号通道数较多的场合。
目前市场上的多路开关以RCA、AD、SILICONIX、MOTOROLA、MAXIN等公司的产品多见,种类繁多,性能、价格差异较大(详见有关公司的相关产品数据手册)。选择和使用多路开关时,考虑的重点是满足系统对信号传输精度和传输速度的要求,同时还必须注意以下两点:第一,全面了解多路开关的特性,否则可能出现难以预料的问题。例如: CMOS 多路开关在电源切断时是断开的,而结型FET多路开关在电源切断时是接通的。若未注意到这一点,就可能因电源的通断而损坏有关芯片。
第二,多路开关只有与相关电路合理搭配,协调工作,才能充分发挥其性能,甚至弥补某些性能的欠缺。否则,片面追求多路开关的高性能,忽略与相关电路的搭配与协调,不但会造成成本与性能指标的浪费,而且往往收不到预期的效果。
此外,受芯片种类或应用场合的限制,在实践中往往有多余的通道。由于多路开关的内部电路相互联系,所以多余的通道可能产生干扰信号,必要时应作适当处理。例如[4]:测试多路开关CC4097和CC4067时发现,所有多余通道的输入端都必须接地,否则将产生干扰信号。
-
电线/开关/插座/断路器的选择及注意事项2011-10-24 4973
-
选择多路模拟开关需要注意哪些事项?2019-08-08 4409
-
如何利用CMOS模拟开关实现平衡混频器?有什么注意事项?2021-04-13 2244
-
如何选择蓝牙?有哪些注意事项?2021-09-27 1697
-
选择与使用开关电源注意事项2022-04-06 13112
-
CD4051/4052/4053多路选择模拟开关2010-05-24 3636
-
光电开关的使用注意事项和技术指标2010-03-02 2609
-
PSoC Creator模拟设计:引脚放置的模拟及注意事项2020-07-01 4531
-
无线开关量模块使用注意事项2023-04-11 2098
-
安全光栅选择注意事项2023-07-14 2191
-
网络设备选择的技巧及注意事项2023-10-25 713
-
高频开关电源变压器的设计及注意事项2023-11-15 770
-
轻负载时开关元件工作相关的注意事项2023-12-14 1248
-
智能高端开关的故障和正常诊断注意事项2024-09-24 468
-
漏电开关的使用注意事项2024-12-30 1874
全部0条评论

快来发表一下你的评论吧 !
