

HYCAN广汽蔚来定义下一代数字座舱
电子说
描述
本文是在北京举办的第六届国际智能网联汽车技术年会朱赛春老师《如何定义下一代数字座舱》的发言稿。
大家下午好!
我们知道数字座舱是用户价值创造、互联网应用生态及基础设施和智能硬件汽车产品落地的关键。很高兴大会的邀请,和大家分享广汽蔚来在面向智能驾驶、互联网生态和基础设施智能硬件生态建设中的数字座舱开发的一些思考。主要分享点有数字座舱产品特征挖掘、数字座舱HMI需求开发及数字座舱开发的若干关键问题。
智能汽车的产品特征
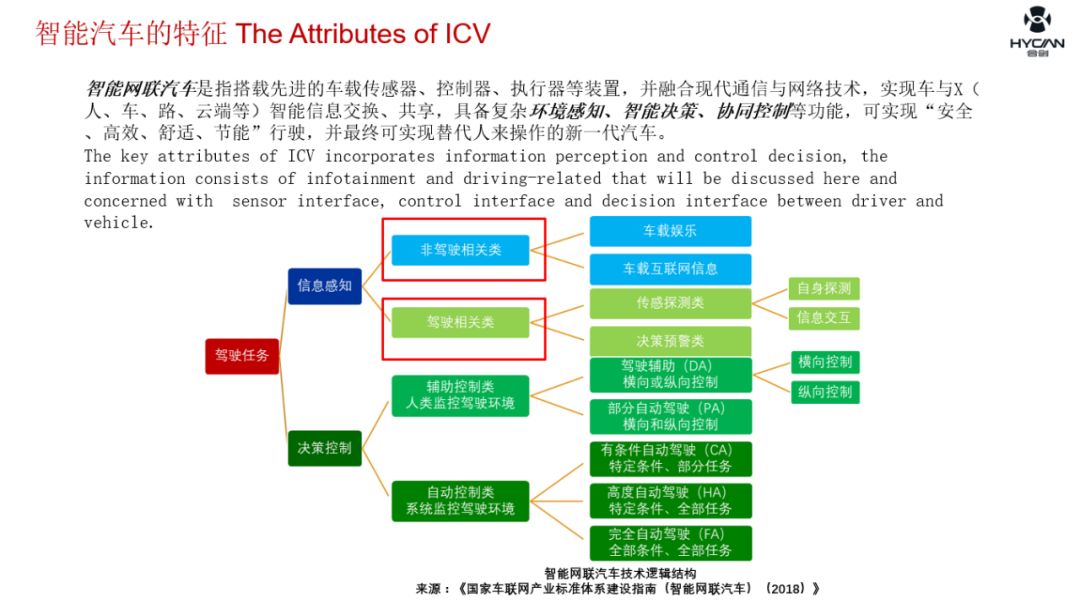
汽车工业正在从机械制造、电气化到数字化智能化转变。智能汽车是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与人、车、路、云端等智能信息交换、共享,具备复杂环境感知、智能决策、协同控制等功能,可实现“安全、高效、舒适、节能”行驶,并最终可实现替代人来操作的新一代汽车。数字座舱的重要任务之一是完成驾驶任务的信息感知。这里的信息感知分为,包括信息娱乐和互联网信息的非驾驶类相关信息;另一类是驾驶类相关的信息,包括环境感知探测和决策预警,这其中按技术手段又分为自身探测和信息交互,这也是我们所说的自能驾驶的两条技术路线:自主自动驾驶和车路协同驾驶,这都离不开ICT技术。
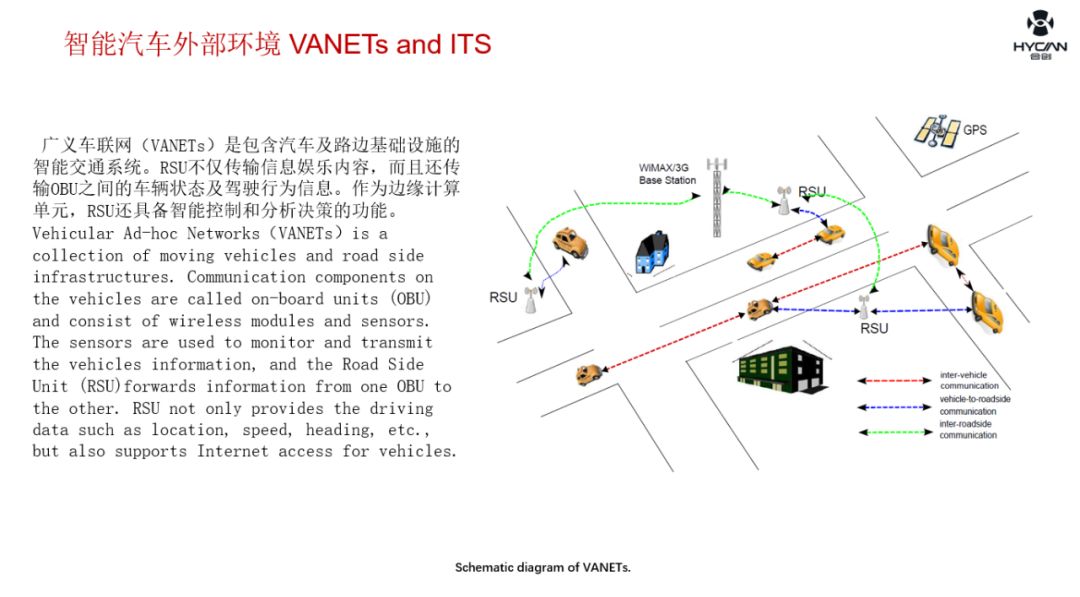
我们在挖掘智能汽车产品属性的时候,除了要考虑人机交互,还要必须考虑车外部环境,即必须把汽车纳入到整个智能交通系统中综合考虑。我们知道自动驾驶技术的研究从几十年前就开始了,阻碍自动驾驶实际应用的主要因素除了技术实现的可能性与可靠性之外,最重要的因素就是道路交通系统的容纳性与安全性,人和社会的需要程度与可接受程度。数字座舱是一种媒介,我们研究方向是怎样通过这种媒介能做到驾驶员和自动驾驶系统(信息系统)的有机融合,自动驾驶车辆与交通系统的有机融合。所以我们研究的不仅是人机交互HMI,更多的还有MMI,放在大的技术生态背景里就是IOT或IOX的万物互联。广义车联网VANETs(Vehicular Ad-hoc Networks)是包含汽车及路边基础设施(RSU)的智能交通系统。RSU不仅传输信息娱乐内容,而且还传输OBU之间的车辆状态及驾驶行为信息。作为边缘计算单元,RSU还应具备智能控制和分析决策的功能。所以,RSU的标准规范制定及基础平台架构设计是未来ITS及智能汽车重要研究方向。
智能汽车需求开发
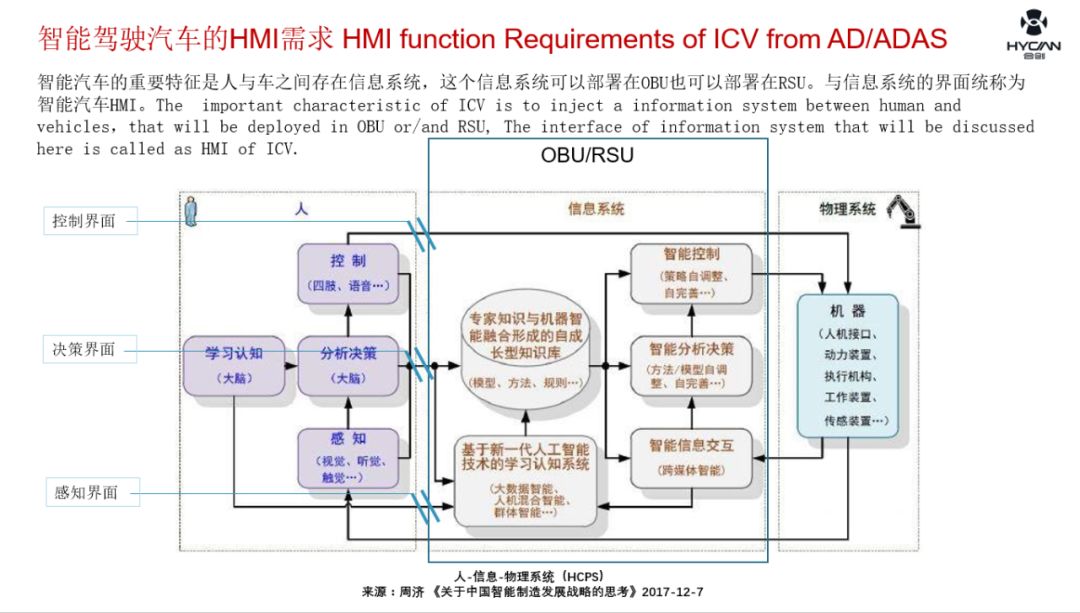
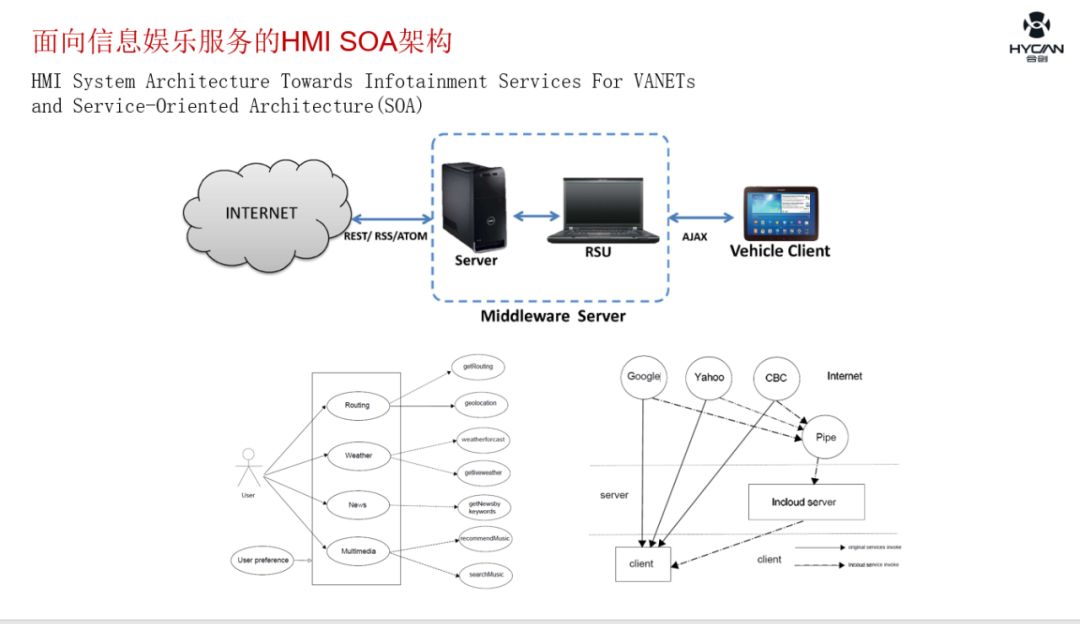
智能汽车的重要特征是人与车之间的信息系统。信息系统的核心是基于新一代大数据智能、人机混合智能技术的机器学习认知系统,基于此系统可以构建专家知识与机器智能融合的自成长融合数据库。这里包含MPC算法模型和深度学习算法等。与此信息系统的交互界面统称为智能汽车HMI开发范畴,这不仅包含跨媒体智能的智能信息交互,而且智能分析决策及策略自调整自学习自完善的智能控制也属于智能汽车HMI研究的重要组成部分。这个信息系统可以部署在OBU也可以部署在RSU。在后面的信息系统的面向服务的SOA架构模型中,我们将重点讲述信息系统部署在RSU的好处。
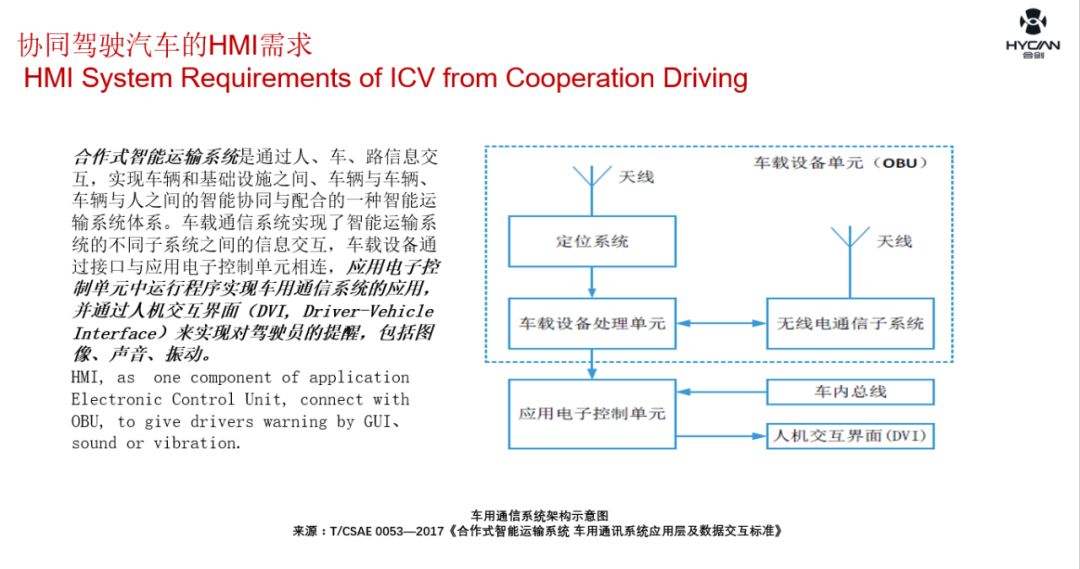
刚才讲过,智能驾驶的两条技术路线-自主自动驾驶和合作协同自动驾驶,我们预判这两种技术路线将会融合。合作式智能运输系统是通过人、车、路信息交互,实现车辆和基础设施之间、车辆与车辆、车辆与人之间的智能协同与配合的一种智能运输系统体系。车载通信系统实现了智能运输系统的不同子系统之间的信息交互,车载设备通过接口与应用电子控制单元相连,应用电子控制单元中运行程序实现车用通信系统的应用,并通过人机交互界面(DVI, Driver-Vehicle Interface)来实现对驾驶员的提醒,包括图像、声音、振动。
数字座舱开发的关键问题
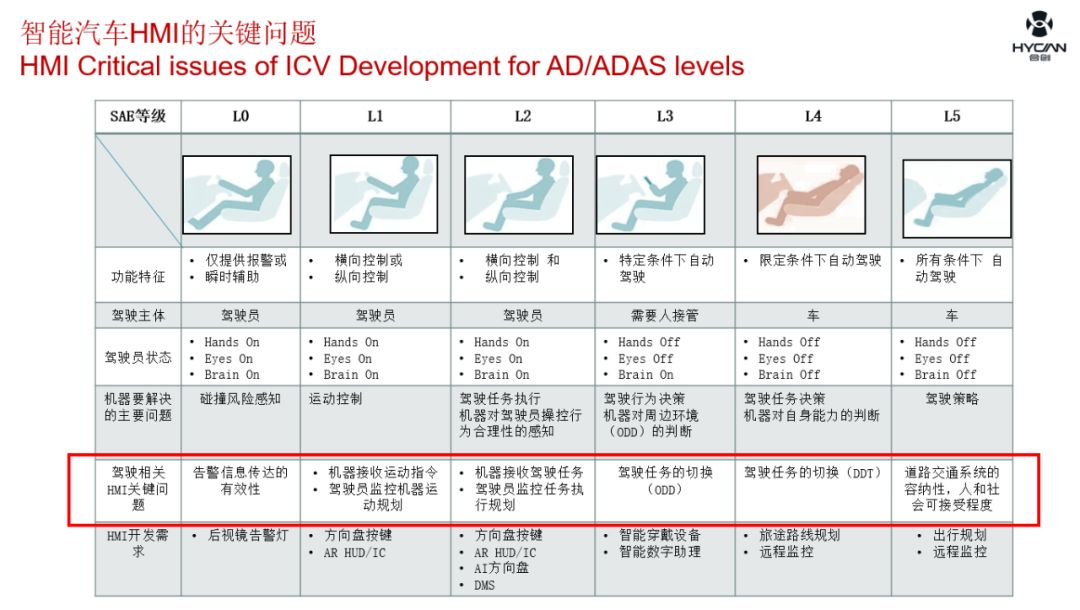
面向智能驾驶的数字座舱开发,遵循SAE J3016™《道路机动车自动驾驶系统相关术语分类和定义》中的自动驾驶自动化等级模型。在L0到L5不同等级中,我们识别出机器要解决的主要问题及相应的人机交互需要解决的问题。在L0开发中,碰撞告警等信息的感知及传达是关键问题。注意这里强调的是传达。涉及到信息过滤和信息的自适应技术。在目前不管是应用传感器还是基于V2X技术的ADAS系统,一个主要问题是大量无效的预警信息干扰驾驶员的正常驾驶行为,驾驶员在需要的时刻获得必要的信息是衡量信息传达有效性的重要指标。在L2开发中,强调是机器对驾驶任务的执行及机器对驾驶员的驾驶指令的合理性的感知判断,即机器对驾驶员非预期性的危险性的驾驶行为的预判。这是我们在主动安全领域研究的重点,我们知道目前的自动驾驶系统的认知体系框架只是场景的感知,远远达不到情景的认知上。因此目前的自动驾驶系统不能彻底解决交通安全性问题。我们通过人因分析及通过大数据机器学习等手段,把数字座舱的设计纳入到交通系统中做有机的整体考虑。在L3开发中,机器对周边环境感知和驾驶行为决策能力(ODD)是我们研究的重点。这一阶段HMI研究的关键是驾驶任务的人机切换的问题,针对V Failure、ADS Failure及ODD Exit等场景,我们研究自动驾驶的形成、脱离过程,包括自动和手动驾驶切换,如何安全顺利的解决人与自动控制系统的角色转换。从中我们采用了大量人因工程的方法。在L4的开发中,更为强调的是机器对自身能力的感知及驾驶任务机器决策的能力。更加聪明的车机能够“量力而行”。在L5的开发中,有人说这没有HMI什么事了,我们认为这一阶段机器主要是解决驾驶策略的问题,人机界面的开发主要是解决道路交通系统的容纳性,人和社会可接受程度的问题。归纳起来,这些问题都是自动驾驶车辆在实际道路交通中存在的安全性和适应性的问题。这也表明智能驾驶舱的人机交互技术是决定自动驾驶在未来普及的关键因素。
HYCAN和广汽蔚来
广汽蔚来,一家以“合创”为理念,汽车和互联网深度融合的用户企业,不仅提供智能纯电动汽车,更为用户提供充满创享的生活。公司由广汽集团、广汽新能源、蔚来基金、蔚来汽车与创始团队、员工共同持股的“合创”公司。主要业务聚焦在纯电动汽车的研发、销售及服务,并通过高品质、个性化的泛产品不断丰富用户的出行生活。2019年5月20日发布品牌“HYCAN合创”及首款概念车,预计首款量产车型于2019年底发布,2020年上半年交付用户。
-
汽车5nm芯片出炉!骁龙第4代数字座舱平台发布,向业界释放哪些信号?2021-01-28 2998
-
如何利用人工智能实现更为高效的下一代数据存储2021-01-15 2392
-
蔚来ET7将采用第三代高通骁龙汽车数字座舱平台2021-01-12 3204
-
蔚来首款旗舰轿车ET7:采用第三代高通骁龙汽车数字座舱平台和5G平台2021-01-11 3108
-
高通与蔚来合作研发下一代数字座舱技术2021-01-10 3390
-
广汽蔚来HYCAN 007配置信息公布,采用永磁同步电机可实现对外放电2020-01-10 18262
全部0条评论

快来发表一下你的评论吧 !
