

消费级设备在变得越来越好 需要更高的性能水平
描述
工业级及汽车级MEMS技术是相对消费级器件而言的,前者成本更高,但远低于传统光纤或环形激光陀螺仪技术。这里将从消费级市场开始,说明我们所称的技术差别。
从多个角度看,这种技术差异都是值得关注的,正如前面所说的,目前市场上有很多应用,包括大量可穿戴技术和手机等,其动态角度估计能有几度的分辨率精度就够好了。对于手机而言,若想知道图片的哪个方向朝上,精度只要大约45度就可以了。在手机上查看不同的东西或玩游戏时,常常也只需要3到5度的精度。
再看偏向于工业应用的器件,您会要求其性能高出10倍以上,而且要能承受更恶劣的环境条件,这很重要。使用成本不到10美元的器件时,年使用量可能是10,000只;再看工业级陀螺仪,使用量可能是数百只左右,成本可能是100美元,理解这一点很重要。
谈论简单运动和复杂运动时,想想它涉及到多少个轴。我拿着手机,沿着一个方向转动,那么就是绕一个轴旋转。这是相对简单的运动。再想象有一辆无人驾驶汽车,沿着崎岖的路面高速行驶。很显然,它会沿着各个方向跳动,因此可以预期,所有三个轴方向上都有运动,不光是三个轴,还有线性和旋转信息。您会考虑需要什么样的精度,还有应用所处的条件。
从这里的说明可以看出,消费级设备在变得越来越好,但工业级设备也是如此。随着时间推移,某些应用空间会成熟起来。消费级设备可能跟上一些发展,并且帮助解决许多需求,但总是存在一系列不断发展的应用需要更高的性能水平,而且会有项目来证明为此付出额外的成本是值得的。
大量研究都发现了这样一个趋势:偏置和其他重要参数的长期稳定性与对传感器中的机械应力的管理好坏有关。封装已变得非常重要。往手机中添加东西时,需要把它做得尽可能小,成本尽可能低;不是任务需要的材料,每一微克都要从设备中去除。自然,它们会更容易受物理应力影响。甚至把手机放到口袋这样简单的事情也会导致封装弯曲,改变其特性。对于这些事情,工业级IMU至少会在一阶上进行处理。
下图右上方是一个四谐振器内核,ADXRS64X系列陀螺仪实际上就是采用这种内核。该四谐振器内核提供两种不同水平的线性抑制,我们称之为器件的共模抑制。这使它在振动抑制方面实现了大跨越。尤其是0.0001度/秒/g2这一数据,对许多传统上需要数万美元解决方案才能上市的应用而言,可谓关系重大。现在,不到1,000美元的解决方案就能实现此类性能。它在面市时是非常令人激动的,今天仍然很常用。
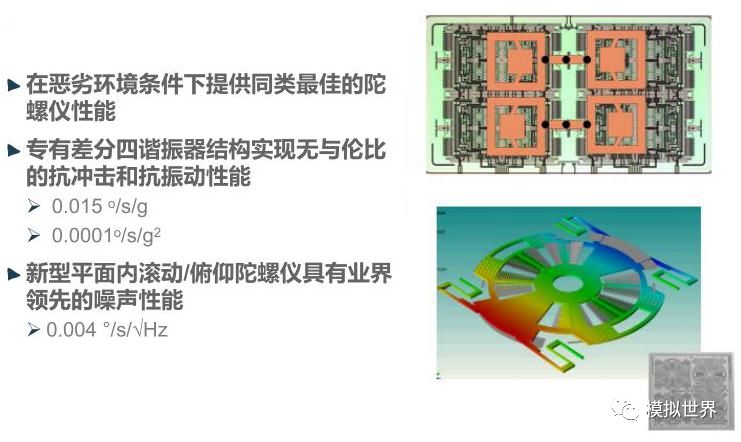
新一代传感器技术,即右下方的弹性碟方法,是当前产品的核心技术,ADXRS290和ADIS16460惯性测量单元均采用该技术。利用多方面的工艺改进和全新的机械架构,我们得以降低噪声和角向随机游动,这在前面的幻灯片中已予以说明,其性能比我们过去的工业级产品线所采用的各种陀螺仪技术要高出4倍。
核心传感器的典型性能差距在哪里?针对消费市场的MEMS IMU与针对工业市场的MEMS IMU进行比较时,又会显露出哪些重要特性?跨轴灵敏度和线性振动抑制是两个关键性能指标。
跨轴灵敏度
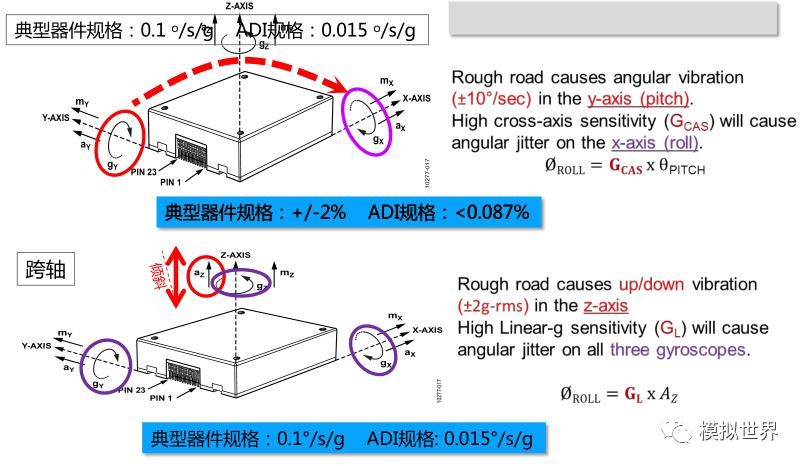
想象把一个IMU放在桌面上,并使它来回转动。理论上,该运动只应显示在一个陀螺仪上,假设是z轴。 x轴和y轴陀螺仪对此不应有所响应。然而,它们实际上会有所响应,跨轴灵敏度反映的就是这种响应的程度。跨轴灵敏度还与这些器件在内部的对齐程度有关。除物理对齐外,还有电子校准对齐。就跨轴灵敏度而言,一般器件的典型值为2%,而针对工业市场的MEMS器件则是不到0.1%。二者相差大约20倍,某些情况下您可以通过系统校准来弥补,但它仍有封装依赖性,当封装随着时间而松弛时,跨轴灵敏度又会降低。因此,针对要求终身保持高性能的应用进行设计时,必须考虑这一10到20倍的性能差距。
线性振动抑制
想象一下,让搭载IMU的印刷电路板在同一张桌子上沿线性方向来回运动。理论上,陀螺仪仅测量角向运动,因此其响应应为0。然而,由于器件制造的一些实际限制,所有MEMS陀螺仪对线性振动都有一定程度的响应。如何规定和说明这种响应,对制造商而言是一个重要判断点,很多时候根本不做规定。即使做了规定,也不是在全频率范围内进行测定或规定。一个器件可能有100 Hz的谐振频率,若用一个grms激励它,陀螺仪上可能显示一个10度/秒信号,这会扰乱所有需要一定精度水平的测量,因为它是一个非模式化的误差。对此需要进行非常细致的研究,这是非常重要的。
以典型方式把这些参数放在相关情形下进行分析,紫色线表示速率噪声密度。速率噪声密度代表器件完全静止时的输出噪声。橙色和红色虚线表示我刚才讨论的内容。这些是噪声源,可能来自我们所称的无关源,导航行业称之为非模式化的能量源。市场上可能有这样的器件:一个器件的紫色线比另一个器件要低,但机械谐振和线性振动响应却要高得多。
如果只看一个噪声参数,可能会轻信这只陀螺仪更好,但实际上,您需要关注所有三个参数和线性振动信息,甚至可能要估计轴上的旋转量。全面地看问题,而不要片面地看问题,确实非常重要。从频谱角度看,总噪声就是曲线下方的面积。在这一特定情形中,总能量显然是以线性振动响应为主,但不同应用会有不同的分析。重要的是,在作出关于使用何种产品的长期决策之前,务必注意这一点。
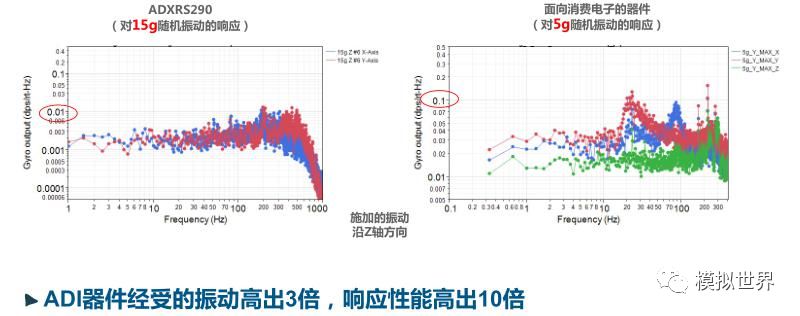
了解实际的测试信息非常重要。数据手册常常不提供此类信息,需要您去询问。多数公司开设了论坛,您可以在其中提问。如果不能在论坛中询问,请通过销售渠道查询,能否找到生产线人员并咨询。否则可能会出问题。这里给出了两个不同陀螺仪的响应曲线,左边是ADXRS290,右边是一款主要针对消费市场的器件。虽然工业级器件经受的振动要高出3倍,但其性能仍然要高出10倍左右。若把它放到上一张图片中,计算曲线下的总能量,滤波需求将很可怕,带宽会非常低,因为这会影响稳定性控制。所以,了解这些重要区别是极其重要的。
IMU机械设计如何避免设计陷阱
第一,根据现有的最佳建议开始机械设计。通过前面的介绍,已经可以看到,机械设计不当会引起长期漂移。需要强调的是,如果把IMU安装在不是针对它而设计的表面上,封装上就会有应力,进而影响器件的行为。对此您应有所考虑。
第二个需要考虑的事项是:如何连接该器件?一般IMU产品的数据接口就是标准的SPI总线。如果是嵌入式SPI产品,它本质上是一个从机,您需要4条IO线来管理SPI接口。您需要电源,需要接地,有时还需要时钟或数据就绪接口,但其实也就这么简单。您需要考虑长期系统的接口类型。
第三是注意通信协议。ADI包括其他大部分IMU供应商在数据手册都有简单的测试案例,您可以在环运行,调试信号完整度、代码、位序、时序等。另外,比如ADI,还提供示例代码,它可帮助您快速上手,但其在细节上有所不同。它提供测试码供您使用,您可以用示波器探头排除各类故障。这也是大家都感兴趣的一个方面。
第四起始代码。利用这些代码,您就能将器件连接到嵌入式处理器。
-
#SMT 一起加油!越来越好?小毛 2021-12-24
-
QAM更高的调制水平2018-09-17 2729
-
越来越好的KAI-08051图像传感器2018-10-11 3279
-
电子设备在汽车中的影响越来越大2019-07-26 2910
-
消费电子产品需要越来越多的容量来存储数字内容2020-06-18 2557
-
国产MCU做得越来越好了 雅特力在车用电子领域再度突破2020-11-30 4462
-
MCU和MPU之间的区别变得越来越模糊2021-11-01 1407
-
PMU 在发展中变得越来越好2017-04-18 1550
-
智能家居市场越来越好是因为什么2019-07-25 867
-
植保无人机发展越来越好 将是未来农业发展的必然趋势2020-01-13 1504
-
目前LED显示屏市场变得越来越大,应用越来越广泛2020-08-25 1184
-
借助软件,视频稳定功能变得越来越好、越来越智能2022-08-19 984
-
变得越来越重要的智能电网2022-12-30 1363
全部0条评论

快来发表一下你的评论吧 !
