

机械手臂搬运加工流程控制过程
工业控制
描述
随着工业自动化的普及,越来越多的人力劳动可被一些自动的工业设备所替代,这样,不仅大大减少了人们的工作强度,并且可大大提高工作效益,使企业可在较短的时间里,生产大批量高效的产品。在加工一线上,自动设备被广泛的应用着,这不仅解决了人所不能在的高温,高腐蚀,高辐射等恶劣的环境中的工作,而且,也很大程度上提高了生产工件的精度和寿命。
PLC是近几十年来发展起来的一种新型工业控制器,它将计算机的编程灵活、功能齐全、应用面广的优点和继电器系统的优点结合起来,而本身又具有体积小、重量轻、耗电省等特点,因此,在工业生产过程中的应用越来越广泛。
机械手臂搬运加工流程控制过程描述
当机械手臂在A工作台的上限位时(即在原点处),按下启动按钮,传送带A开始工作,把物件输入,当物件被送到工作台A时,传感器感应到该信号,此时机械手臂开始向下运动,直至到下限位,然后电磁阀得电,夹紧物块,经过一定时间后,机械手臂夹紧物块开始向上运动,直至到上限位,在此之后,机械手臂夹紧物块向右移动,直至到工作台1,然后机械手臂夹紧物块向下运行,直至到下限位后,电磁阀失电,松开物块,经过一定时间后,机械手臂向上运动,当达到上限位后,机械手臂停止运动,物块在工作台1上被加工,当传感器发出物件在1处被加工完的信号时,机械手臂开始向下运行,到达下限位后,电磁阀得电,夹紧物块,经过一定时间后,再夹紧物块向上运行,然后机械手臂依次进行右移到工作台2→下降→松开→上升→在工作台2上加工,当物块在工作台2上加工完成后,机械手臂又下降→夹紧→上升→右移→到传送带B→下降→放松→上升→传送带B将物件运出并计数→机械手臂回原点,执行下一周期的工作。
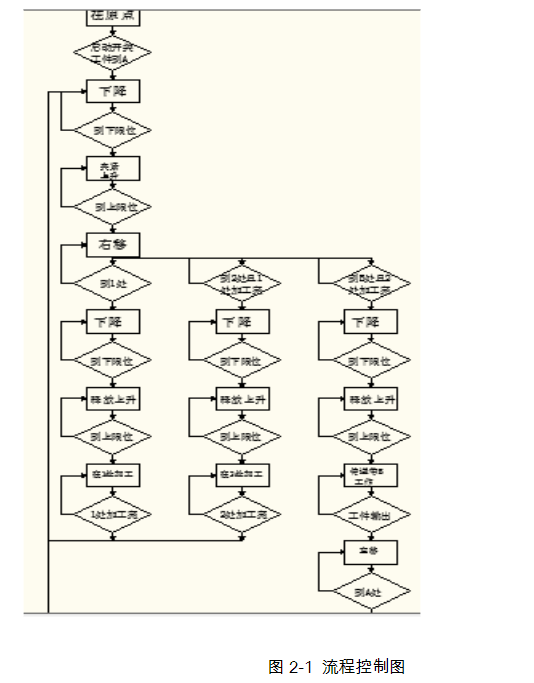
流程控制图
按上述描述过程,可得其流程控制图如图2-1:
机械手臂搬运加工流程控制过程描述
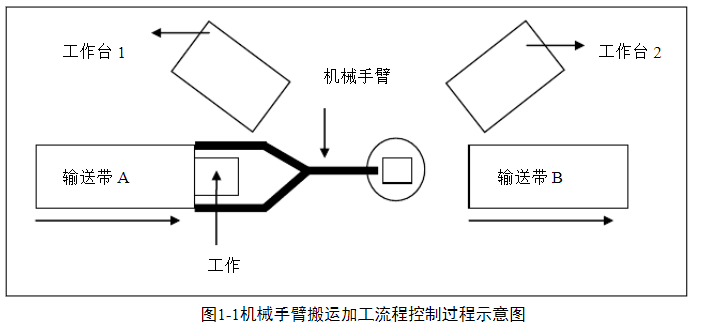
如图1-1所示,有两部机械装置对工作物进行加工,对象由输送带A送到加工位置,然后再由机械手臂将加工物送至工作台1的位置进行第一步骤加工。当第一步骤加工完成后,机械手臂将工作物夹起再送至工作台2进行第二步骤加工;当第二步骤加工完成后,机械手臂将工作物放到输送带B送走,最后由7段数码管显示加工完成的数量。
机械手臂搬运加工流程控制工艺分析
机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
目前机械手的主要发展经历可以分为三代:第一代机械手主要是靠人工进行控制,控制方式为开环式,没有识别能力;改进的方向主要是将低成本和提高精度;第二代机械手设有电子计算机控制系统,具有视觉、触觉能力,甚至听、想的能力。研究安装各种传感器,把接收到的信息反馈,使机械手具有感觉机能;第三代机械手能独立完成工作过程中的任务。它与电子计算机和电视设备保持联系,并逐步发展成为柔性系统FMS和柔性制造单元FMC中重要的环节。
机械手主要由手部、运动机构和控制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机械手设计的关键参数。
机械手的运动机构主要包括由两个电磁阀控制的液压钢来实现机械手的上升下降运动及夹紧工件的动作,两个转速不同的电动机分别通过两线圈控制电动机的正反转,从而实现小车的快进、慢进、快退、慢退的运动运动;其动作转换靠设置在各个不同部位的行程开关产生的通断信号传输到PLC控制器,通过PLC内部程序输出不同的信号,从而驱动外部线圈来控制电动机或电磁阀产生不同的动作,可实现机械手的精确定位;其动作过程包括:下降、夹紧、上升、慢进、快进、慢进、延时、下降、放松、上升、慢退、快退、慢退;其操作方式包括:回原位、手动、单步、单周期、连续;来满足生产中的各种操作要求。
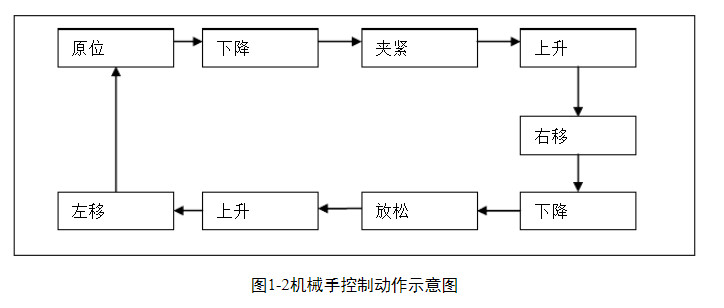
本次设计使用气压机械手臂,一开始手臂先下降,碰到下限开关开始做夹起动作,然后开始上升碰到上限开关后,手臂开始往右,当碰到第一工作站的极限开关时,机械手臂下降将工作物放置工作台l然后上升等待机械对工作物加工;当工作物第一加工步骤完成时,机械手臂再依进行下降一夹住一上升一往右一下降一释放等流程,将工件放置工作台2上进行第二加工步骤。当第二加工步骤完成时,机械手臂再依进行下降一夹住一上升一往右一下降一释放等流程,将工件放置输送带B送出,并由7段数码管显示出加工完成的数次。动作示意图如图1-2所示。
-
 jf_03311866
2022-12-21
0 回复 举报没了? 收起回复
jf_03311866
2022-12-21
0 回复 举报没了? 收起回复
-
案例分析,搬运机械手如何选择电机?2025-01-21 2278
-
机械手 OEM 的应用2024-09-18 987
-
高速码垛机器人机械手臂的构成2021-08-23 2533
-
关于工业一体机在机械手臂中的应用分析2021-01-05 1197
-
机械手臂与航模电源怎么链接2019-06-11 1344
-
请问谁会用stm32单片机控制机械手臂的运动2019-04-10 4672
-
基于dragonboard 410c的机械手臂制作2018-09-25 2660
-
6轴机械手臂3D模型2017-03-24 2950
-
【NUCLEO-F412ZG申请】基于stm32的五轴机械手臂设计2016-11-14 2864
-
转:分享基于ATmega16的搬运机械手的设计与控制方案2016-08-04 2161
-
机械手控制22016-06-15 1086
-
机械手臂结构优化设计2015-11-20 1219
-
晶圆搬运机械手2015-07-28 11294
-
智能型机械手臂的探讨与研究2011-03-08 4599
全部0条评论

快来发表一下你的评论吧 !
