

轻型机械臂模块关节机械设计方案
工业控制
描述
机械臂是指高精度,高速点胶机器手,机械臂是一个多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性, 已在工业装配, 安全防爆等领域得到广泛应用。
机械臂是一个复杂系统, 存在着参数摄动、外界干扰及未建模动态等不确定性。因而机械臂的建模模型也存在着不确定性,对于不同的任务, 需要规划机械臂关节空间的运动轨迹,从而级联构成末端位姿。
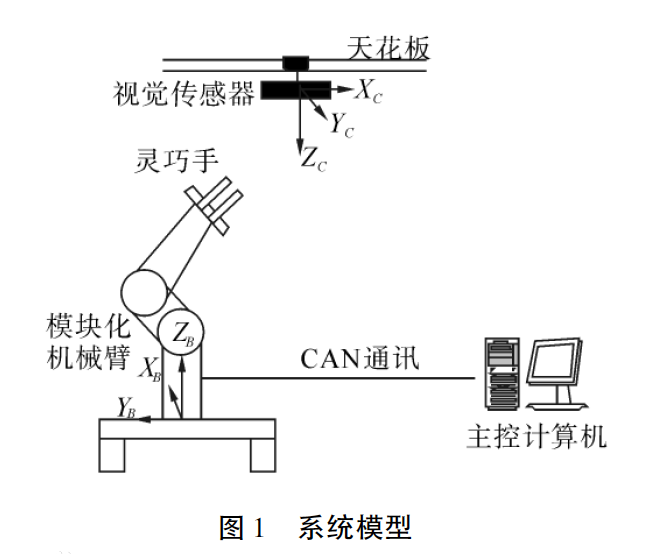
机器人系统是由视觉传感器、机械臂系统及主控计算机组成,其中机械臂系统又包括模块化机械臂和灵巧手两部分。整个系统的构建模型如图1 所示
轻型机械臂模块关节机械设计方案
电机:直流无刷电机,参数为供电电压,额定电流,极对数,额定扭矩,额定转速,电机尺寸;
谐波减速器:谐波减速器是关节动力传动中的关键部件,关节刚轮的大小基本上决定了整个关节的径向尺寸,要求谐波减速器的尺寸要尽可能小,同时保证较高的旋转精度;
增量式编码器:基于电机端的增量式编码器来控制电机的速度环实现相对简单,可靠性高。
制动器:为防止意外断电时机械臂由于重力继续运动,需要在关节设计时加入制动将转轴抱死,为能够快速可靠的制动,制动器的制动力矩要大于电机的最大输出力矩。
绝对编码器:绝对式编码器用于测量关节输出轴转过的角度,绝对式编码器包含单圈绝对式和多圈绝对式。
轴承:轴承对转轴和输出轴进行支承,轴承的安装和旋转精度将会直接影响关节的传动效率和转动精度,关节传动轴通过一对深沟球轴承进行支承,关节输出轴采用精度更高的交叉滚子轴承支承,减小整个关节质量并提高传动精度。
模块化关节由电机、减速器、传感器、制动器、控制器和电器接口组成。为缩小关节体积,减小质量,关节采用扭矩大体积小的电机,选用安装方便质量较轻的谐波减速器作为传动机构。
速度传感器(增量编码器)安装在转动轴一端,位置传感器(绝对编码器)安装在输出轴上,控制关节的速度与位置。核心部件都已标出,关节传动路线简单高效,安装拆卸方便,基本上所有的零件均以壳体作为定位,在关节后端留出足够的空间用来安装控制器和制动器。
关节与关节之间通过径向螺钉孔进行连接。所有需要加工的零件均采用 7075 硬质铝合金进行加工,根据安装需要确定各零件的表面粗糙度和形位误差以及配合公差。在两类关节设计的过程中为减少特定传感器定制的成本,通过调节零件的尺寸,减少增量式编码器和绝对式编码器的种类。
关节动力来自于转轴,转轴套入电机转子,转轴一端通过 61806 轴承支承在壳体上,另一端通过 61809 轴承支承在定定子套筒上。转轴末端连接谐波减速器的波发生器,将动力传递至谐波减速器。钢轮和定子套筒固定在壳体上,定子套筒末端开口设计用于电机信号线的穿过。
动力经过谐波减速器减速增矩后由柔轮进行输出,柔轮与输出轴刚性连接通过交叉滚子轴承支承在壳体上,作为整个关节的动力输出。转轴大端连接转接头安装增量式编码器磁环和制动器衔铁,用于实现电机速度测量和失电制动。为保证谐波减速器的安装精度,相邻零件间均采用止口定位。关节采用增量式编码器测量转动轴关节速度,采用绝对式编码器测量输出轴关节角度。
-
基于LabVIEW和SolidWorks改进机械臂的设计流程2015-02-12 9176
-
做毕设,需要用2812控制由舵机组成的三关节机械臂,求助2017-04-10 4620
-
【智能控制】机械手参数辨识——双关节机械臂动力学方程2018-01-11 2654
-
如何对机械臂的关节速度进行动态绘图?2021-11-03 1796
-
求一种基于stm32的机械臂循迹避障小车设计方案2022-01-05 1358
-
机械臂的相关资料分享2022-01-20 1338
-
基于STC8H1K28双轴机械臂驱动模块设计2022-02-18 1451
-
机械设计概述2011-03-16 851
-
【智能控制】机械手参数辨识——双关节机械臂动力学方程ppt下载2018-01-10 1395
-
机械臂关节驱动组件2018-01-19 1729
-
液压驱动连续型机械臂原理与设计2018-03-05 3041
-
新型模块化机械臂的研制2018-03-15 1270
-
机械臂路径规划方案的简单介绍2021-07-12 3448
-
什么是小机械臂?问天实验舱小机械臂在轨测试流程2022-08-29 1371
-
Mycobot机械臂各关节的运动(三)2022-09-30 2177
全部0条评论

快来发表一下你的评论吧 !
