

如何才能快速的创建机器人模型
机器人
描述
机器人模型是如何创建的?需要工程师一行一行敲写代码吗?每一次模型创建都需要重新开始吗?创建过程总是艰难而又复杂的吗?试看仙知机器人是如何操作的,你便会发现,创建机器人模型原来还可以这样方便快捷。
仙知机器人自主研发的可视化操作软件Roboshop,支持【机器人模型】编辑,那具体操作是怎样的呢?请看下面介绍:创建机器人模型。
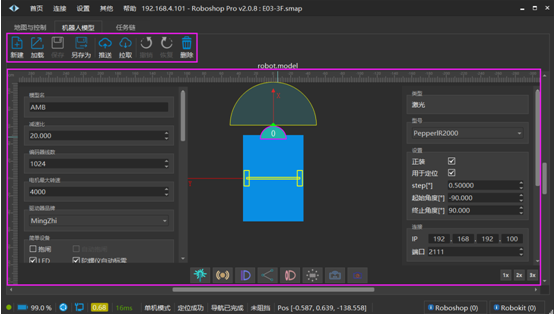
第一步:打开可视化操作软件Roboshop,进入【机器人模型】编辑模块,如下图所示,大致分为【模块工具栏】和【模型编辑区域】两部分。
第二步:点击工具栏【新建】,如下图所示,出现机器人模型创建的三种方式,分别为:【使用引导创建】、【使用已有模型创建】、【使用默认方式创建】。
(1)使用引导创建:
功能:Roboshop内置新建模型引导,用户可根据软件提供的模型创建引导流程,快速完成机器人模型创建。
方法:点击【使用引导创建】选项后,会在界面上弹出【新建模型引导】的引导界面,如下图所示;按照其提供的步骤和相应的提示,就能快速创建新的机器人模型。
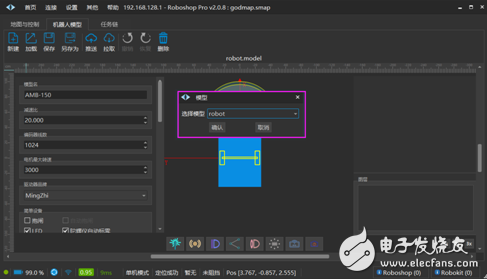
(2)使用已有模型创建
功能:通过加载软件目录中已经存在的模型文件,更快速的创建新的机器人模型。
方法:点击【使用已有模型创建】选项后,会在界面上弹出【模型】界面,如下图所示;可根据需求选择对应的模板。
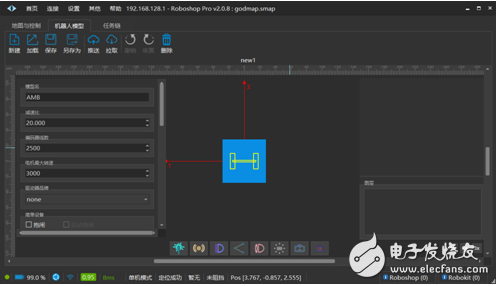
(3)使用默认方式创建
功能:只创建一个默认参数的底盘,然后用户可根据需求添加需要的模块,并进行参数配置。
方法:点击【使用默认方式创建】选型后,在模型编辑区域会直接加载一个只有一块底盘的模型文件,如下图所示;用户可以根据需求对该模型文件进行编辑。
由于“使用引导创建”和“使用已有模型创建”根据之前模板或引导流程即可完成创建,这里便不再详细讲解;接下来重点介绍“使用默认方式创建”方法:
第一步:基本参数配置
如下图所示,左边被框选部分为【基本参数配置区域】;包括:【模型名】、【减速比】、【编码器线数】、【电机最大转速】、【驱动器品牌】、【简单设备】、【可选设备】:(充电机构、叉车、PGV、顶升、辊筒、牵引、机械臂)、【直接设备】、【接口设备】等。
注:(1)所有的配置信息必须要准确无误,完成编辑后请仔细检查所填写的内容。然后对当前的模型文件进行【保存】、【推送】和【拉取】。
(2)在【简单设备】模块,只有选择【抱闸】,后【自动抱闸】控件才可用。
(3)可选设备需要按照当前所配置机器人的实际需求进行开启或关闭。
【DO】设备默认状态,如下图所示,绿色表示通电,红色表示断电,通过点击按钮切换状态。
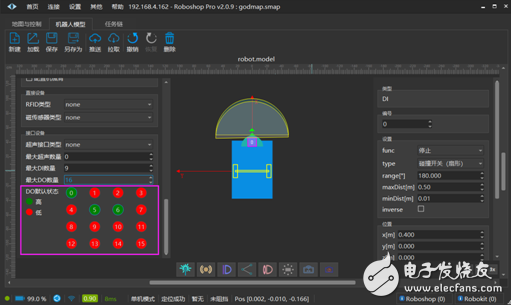
第二步:底盘配置
如下图所示,点击【底盘】,在右侧的【设备属性配置区域】进行底盘相关属性的配置
第三步:其它参数配置
依次完成激光、超声、DI、DO、磁传感器、RFID、相机等参数配置,即可完成机器人模型创建。它将产生哪些独特的价值?
(1)无需用户编写代码,即可快速完成机器人模型创建;
(2)内置引导流程,用户可使用引导创建,快速上手使用;
(3)用户无需重复创建机器人模型。再次使用时,可通过加载软件目录中已经存在的模型文件,更快速的创建新的机器人模型;
(4)用户可根据自身需求自主创建机器人模型。包括激光、电机、驱动器、电池、超声、DI、DO、RFID、相机、底、车型等自主搭配,并提供丰富选择供用户使用等。
-
Al大模型机器人2024-07-05 2476
-
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型2024-12-29 1967
-
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书2025-04-30 4163
-
机器人姿态监控2012-02-11 5894
-
机器人视觉——机器人的“眼睛”2015-01-23 6158
-
nao机器人与其他机器人的区别2015-02-13 6982
-
【Aworks申请】家庭服务机器人2015-07-19 2109
-
并联机器人快速准确拾取物体2016-09-14 20518
-
机器人电缆使用要满足哪些要求2019-04-12 1404
-
“协作机器人”如何快速处理传感器数据2020-08-05 4153
-
机器人的定义是什么?工业机器人的应用有哪些?2021-07-05 5456
-
【双足轮机器人】SK8O技术详解--(4)实物机器人的结果(5)结论【翻译】 精选资料分享2021-08-30 2054
-
工业机器人仿真与编程2021-09-07 2432
-
将Simulink模型与Lego机器人结合使用2021-12-20 1924
-
如何创建机器人模型2023-11-22 2309
全部0条评论

快来发表一下你的评论吧 !
