

无刷电机的驱动工作原理
电子常识
描述
无刷直流电机(BLDC)以电子换向器取代了机械换向器,所以无刷直流电机既具有直流电机良好的调速性能等特点,又具有交流电机结构简单、无换向火花、运行可靠和易于维护等优点。
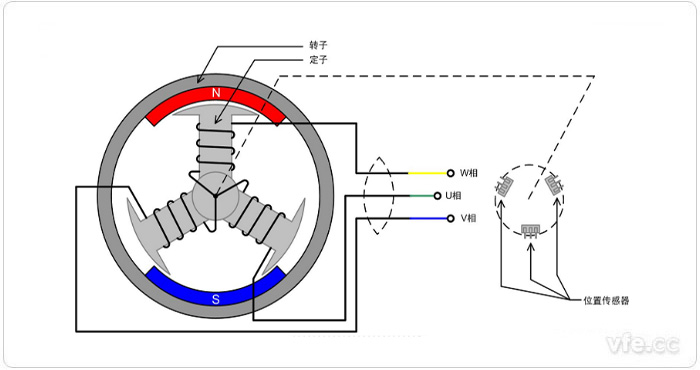
图1、无刷直流电机模型
无刷直流电机主要由用永磁材料制造的转子、带有线圈绕组的定子和位置传感器(可有可无)组成。可见,它和直流电机有着很多共同点,定子和转子的结构差不多(原来的定子变为转子,转子变为定子),绕组的连线也基本相同。但是,结构上它们有一个明显的区别:无刷直流电机没有直流电机中的换向器和电刷,取而代之的是位置传感器。这样,电机结构就相对简单,降低了电机的制造和维护成本,但无刷直流电机不能自动换向(相),牺牲的代价是电机控制器成本的提高(如同样是三相直流电机,有刷直流电机的驱动桥需要 4 只功率管,而无刷直流电机的驱动桥则需要 6 只功率管)。
图1所示为其中一种小功率三相、星形连接、单副磁对极的无刷直流电机,它的定子在内,转子在外。另一种无刷直流电机的结构和这种刚刚相反,它的定子在外,转子在内,即定子是线圈绕组组成的机座,而转子用永磁材料制造。
无刷直流电机有以下的特点:
● 无刷直流电机的外特性好,能够在低速下输出大转矩,使得它可以提供大的起动转矩;
● 无刷直流电机的速度范围宽,任何速度下都可以全功率运行;
● 无刷直流电机的效率高、过载能力强,使得它在拖动系统中有出色的表现;
● 无刷直流电机的再生制动效果好,由于它的转子是永磁材料,制动时电机可以进入发电机状态;
● 无刷直流电机的体积小,功率密度高;
● 无刷直流电机无机械换向器,采用全封闭式结构,可以防止尘土进入电机内部,可靠性高;
● 无刷直流电机比异步电机的驱动控制简单。
无刷电机的驱动工作原理
无刷直流电机的定子是线圈绕组电枢,转子是永磁体。如果只给电机通以固定的直流电流,则电机只能产生不变的磁场,电机不能转动起来,只有实时检测电机转子的位置,再根据转子的位置给电机的不同相通以对应的电流,使定子产生方向均匀变化的旋转磁场,电机才可以跟着磁场转动起来。
如图2所示为无刷直流电机的转动原理示意图,为了方便描述,电机定子的线圈中心抽头接电机电源 POWER,各相的端点接功率管,位置传感器导通时使功率管的 G极接 12V,功率管导通,对应的相线圈被通电。由于三个位置传感器随着转子的转动,会依次导通,使得对应的相线圈也依次通电,从而定子产生的磁场方向也不断地变化,电机转子也跟着转动起来,这就是无刷直流电机的基本转动原理——检测转子的位置,依次给各相通电,使定子产生的磁场的方向连续均匀地变化。
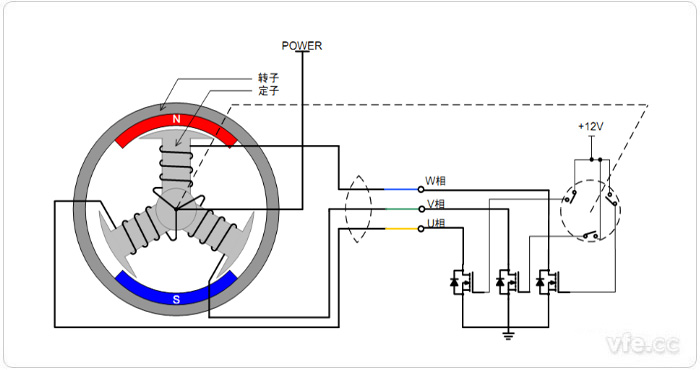
图2:无刷直流电机转动原理示意图
1.三相驱动桥
下图为无刷电机的三相全桥驱动电路,使用六个N沟道的MOSFET管(Q1~Q6)做功率输出元件,工作时输出电流可达数十安。为便于描述,该电路有以下默认约定:Q1/Q2/Q3称做驱动桥的“上臂”,Q4/Q5/Q6称做“下臂”。
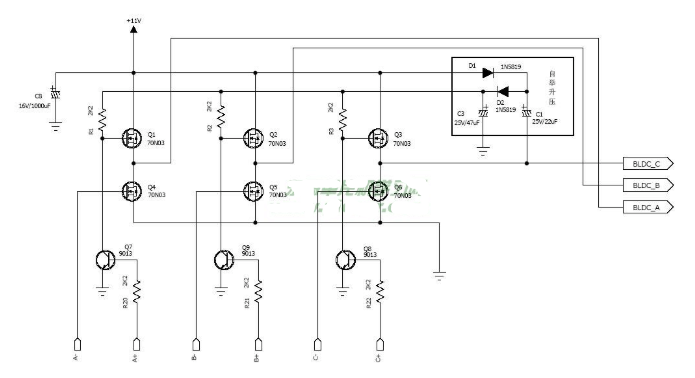
图中R1/R2/R3为Q1/Q2/Q3的上拉电阻,连接到二极管和电容组成的倍压整流电路(原理请自行分析),为上臂驱动管提供两倍于电源电压(2×11V)的上拉电平,使上臂MOSFET在工作时有足够高的VGS压差,降低MOSFET大电流输出时的导通内阻,详细数据可参考MOS管DataSheet。
上臂MOS管的G极分别由Q7/Q8/Q9驱动,在工作时只起到导通换相的作用。下臂MOS由MCU的PWM输出口直接驱动,注意所选用的MCU管脚要有推挽输出特性。
驱动桥全部选用N沟道MOSFET的好处:
大电流N沟道MOS可供选择的型号众多,货源充足便于购买,使用的MOSFET类型减少,间接降低采购元件的难度。
在图1中,上臂MOS管经过Q7/Q8/Q9驱动,逻辑电平和下臂MOS刚好相反,这样的好处是,MCU上电时I/O默认为1,上臂MOS不会导通。只有下臂MOS导通,因此不会有电流经过驱动桥,消除了潜在电路隐患。
C8是整个电调的电源滤波电容,使用中一定要接上,否则无刷电机的反电动势叠加在电源上不能被滤除,由倍压电路整流后的电压高达30V左右,己接近MOSFET的VGS上限,可能会损坏MOSFET。
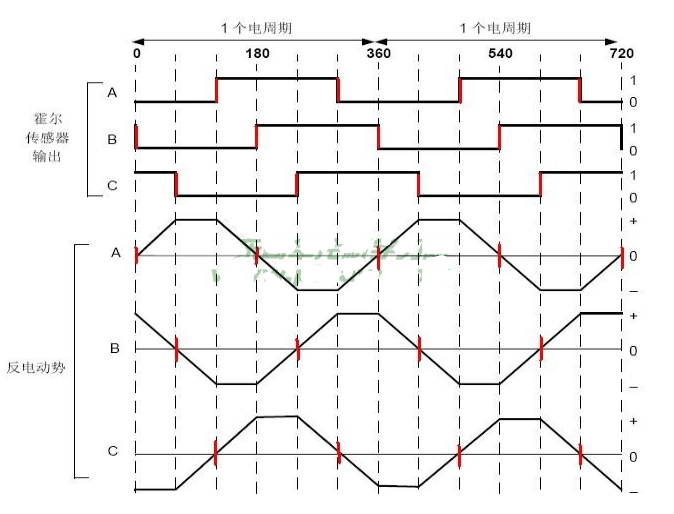
2.反电动势波形
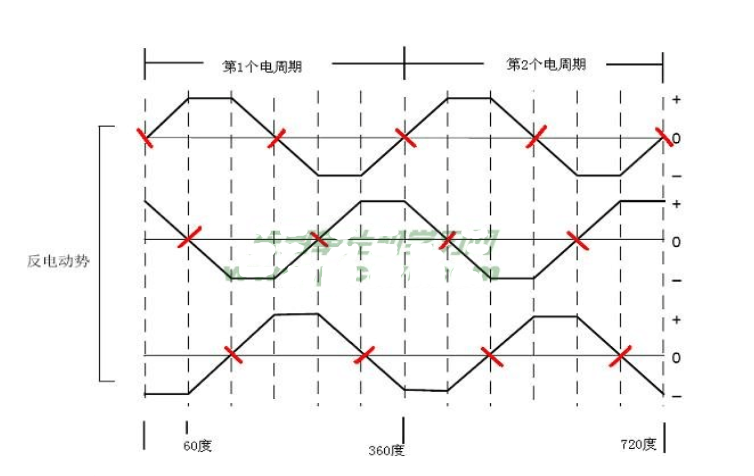
上图所示为无刷电机运转中的理想反电动势波形,红线标出来的是反电动势的过零点。两个虚线间是60度电气角度,不要理解成电机的机械角度。常用航模电机属于无刷三相六拍电机,每个电周期有六个状态。星形接法中(Y形)在每一时刻电机的通电线圈只有两相,另一相线圈悬空,悬空的线圈会产生反电动势,反电动势来源于电机磁体旋转而造成本线圈切割磁力线和另两相线圈通电时的互感。由于电机转动的瞬时角速度呈梯形波动,产生的反电动势也相应的呈梯形变化。但这些不是重要的,我们需要的只是准确的检测出过零点,为换相做准备。看上图中的第一个电周期过零点数目,三个线圈在时间轴上共出现6次过零点,和电周期的节拍数目相同。我们所要做的是,只要检测到过零点,就需要给电机换相了。
3.过零检测电路
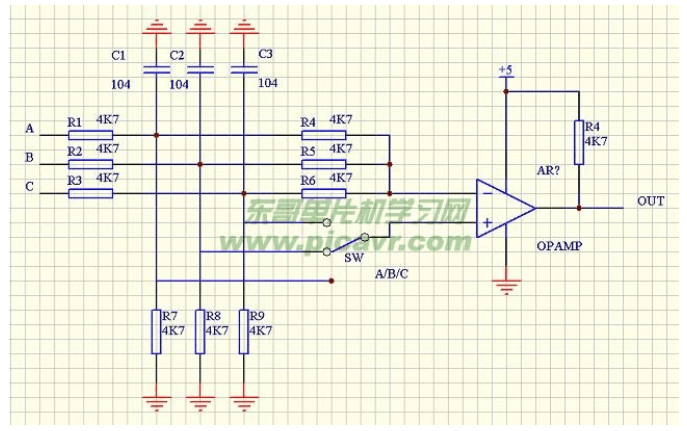
用比较器检测过零点的基本电路接法,电机的相线(A/B/C)接比较器的同相输入端,比较器的负端接相线A/B/C的虚拟地电位。虚拟地电位由A/B/C相经过电阻隔离形成,详细原理可参考相关资料。相线上产生的反电动势电压以虚拟地为参考点,做正负周期性的变化。在每次比较器输出状态翻转时,说明检测到了过零点,接下来需要做换相动作了。A/B/C三相分别需要一个过零点检测电路,也可用电子开关电路进行实时切换,A/B/C相共用一个过零检测电路,这通常在集成了模拟外设的MCU内实现。
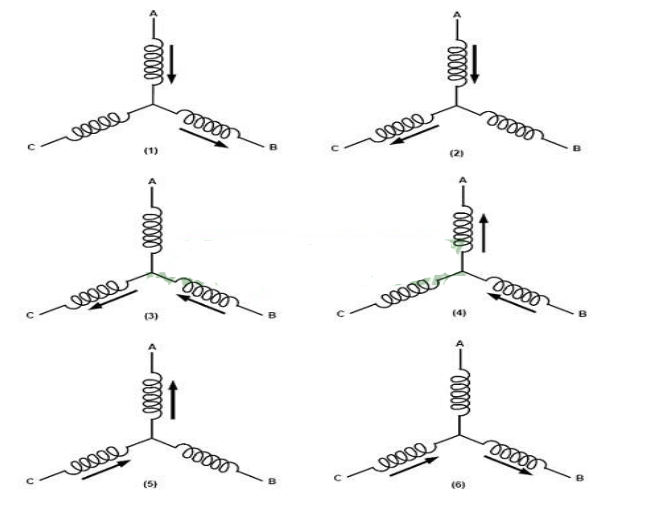
4.线圈换相的顺序
关于电机运行的换相步骤,需严格按照以下的换相顺序如图4所示,应用中需要调换电机的转动方向,只需把电机的任意两根相线对调即可。
5. 过零点的30度电角度延迟
理想的反电动势波形和霍尔传感器输出波形对比图,从图中可看出,反电动势的过零点和霍尔传感器的波形翻转同步,如果用此反电动势过零信号进行程序换相会获得和有感无刷电机一样的运转性能。
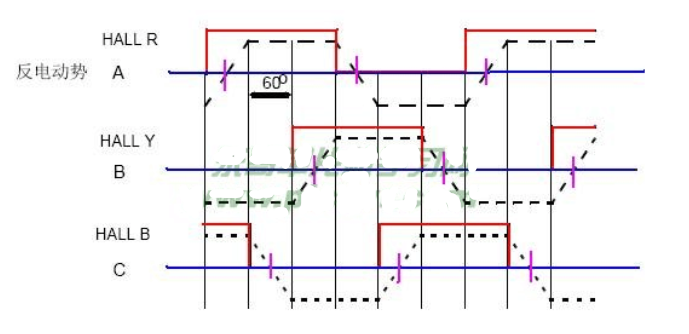
实际的反电动势波形和霍尔波形对比图如上所示,红线为霍尔的输出波形,黑色虚线是反电动势,紫色竖线为反电动势的过零点,时间轴的方向为从左往右,可以得知反电动势的过零点比霍尔传感器的输出波形提前了半个电节拍,即30度电角度。为了能够在正确的时刻才换相,需要在检测到反电动势过零点后延迟30度电角度之后,才进行换相。究竟延迟多长时间才够30度时间呢?需要对相邻两个过零点之间的时间进行计时,因为无刷电机的转速是会变化的,相应的电周期也会变化。用定时器得到计时值后除以2就是当前电机转速下的30度电角度延迟时间值,把此时间值装入一个定时器,并打开该定时器中断,等延时完毕进中断即可完成电机换相。
-
小编科普直流无刷电机的工作原理是什么?2021-07-20 1439
-
电动车无刷电机的工作原理是什么?2021-07-26 4268
-
无刷电机的工作原理及其优点是什么2021-08-02 1639
-
直流无刷电机工作原理2017-01-21 1466
-
无刷电机为什么不用铁氧体_无刷电机驱动原理及结构图2018-05-09 43195
-
直流无刷电机的工作原理的详细资料简介2019-01-02 2880
-
为什么电动工具选用的是这款无刷电机?2019-10-12 13618
-
直流无刷电机的工作原理2021-09-18 2985
-
无刷电机的驱动工作原理2022-02-21 3286
-
三相无刷电机的结构、工作原理及驱动方法2023-02-12 27056
-
直流无刷电机工作原理是什么2023-05-08 3409
-
直流无刷电机的工作原理及Matlab/Simulink仿真分析2023-05-24 10663
-
直流无刷电机的工作原理 直流无刷电机的基本结构2024-06-04 6985
-
无刷电机驱动器的工作原理和结构组成2024-06-12 6122
-
什么是无刷电机?它的工作原理是什么??2024-08-21 4774
全部0条评论

快来发表一下你的评论吧 !
