

关于柔软机械手的相关研究分析
描述
Device Plus网站由半导体和电子零件制造商ROHM(罗姆)创建,为喜欢创造事物和有抱负的工程师们提供有用的信息,旨在让工程师生涯更有趣。
虽然我们说“好玩”,但不仅仅是娱乐。它可以加深你在某一领域的知识,获得灵感,继而用灵感来改变世界。Device Plus文章的主题都与电子套件和工程师生活相关。我们将讨论“技术”主题下的人、事件、黑客/提示、工具、设备等。在这里既有知识加深,又不忘妙趣横生。我们希望能吸引热爱电子和机电一体化的您,并帮助您找到灵感。
具有人类触觉的柔软机械手开启了假肢研究的新领域。手是人类身体接触所有事物的重要部分,不仅具有触摸、抓取和抓握的功能,而且指尖还拥有非常敏感且与身体其他部分相连的感觉神经。
康奈尔大学的一个由机械和航空航天工程助理教授、有机机器人实验室(ORL)首席研究员Robert Shepherd带领的研究团队研制了一种搭载光敏应变传感器的假手,能够实现人手的类似功能。该机械手可以移动每根手指、触摸物品并拥有内部感觉。
通常,我们认为机器人都是由金属制成的刚性结构,其传感器通常位于机身外部。然而,这只特殊的机械手是柔性的,而且具有触觉。Zhao表示,“我们将传感器集成在了机械手内部,因此,这些传感器实际上可以通过机器人的厚度来检测传递的力量,就像我们和所有生物体感受疼痛的机理一样”。
目标和设计
该项目旨在证明光学传感器可以集成到柔性执行器中,并提供高品质的感官能力。这些弹性光波导高度可拉伸、化学稳定、易于制造并拥有高精度的信号输出。
该假手安装在一个3D打印的刚性手掌上,由四根致动软指(ΔP= 100kPa)和一根拇指组成。研发团队选用3D打印和软光刻的原因如下:这些技术拥有较高的设计自由度、重塑软质材料形状的成熟能力以及高精度。
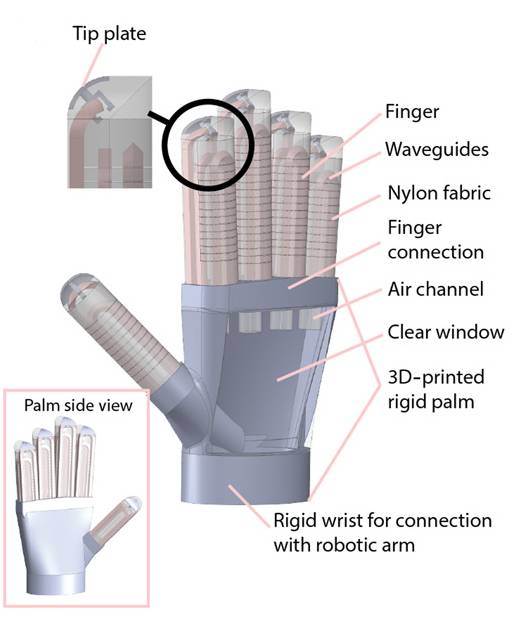
图1.柔性机械手结构和组件 / Zhao等人,2016
指尖由外径18 mm的中空硅胶管制成。四根手指通过气动系统控制。压缩空气通过中空管进入之后,充气压力驱动手指执行各种手的动作。假手的每根手指都设计为柔性,以利用其内在的顺应性,因此他们可以通过开环控制实现大部分实验。软执行器可以将外力传至内部结构和嵌入式传感器。指尖还集成了与波导相连、直接将外部力传递到波导的指尖感光板,以提高触觉灵敏度。
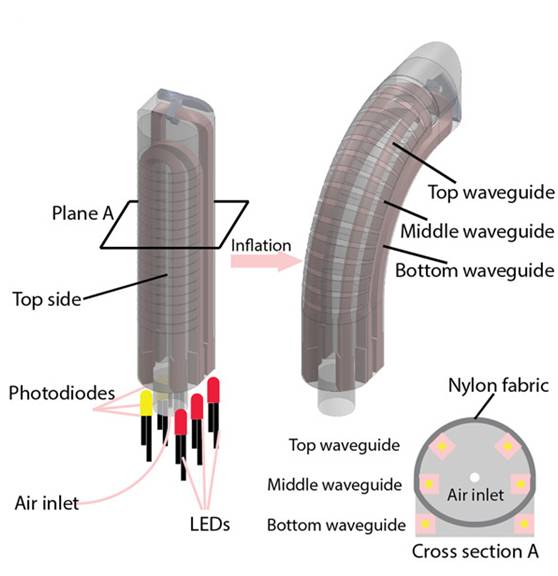
图2.柔性手指结构和组件 / Zhao等人,2016
每根手指都由具有细缝的尼龙织物制成,以实现周向拉伸,进行致动。致动器中嵌入了光敏应变传感器,而且每根手指中嵌入三个波导(U形波导;顶部、中部和底部)。嵌在手指中的传感器通过光学器件传递压力、纹理和位置信息。
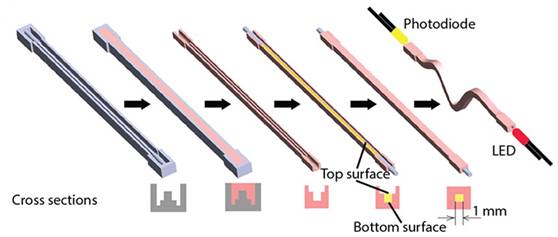
图3.波导制造过程 / Zhao等人,2016
引导电磁波的弹性波导为中空管,使用透明聚氨酯橡胶制成。光通过波导管传播时会产生损耗,如果波导管发生变形,光损失量还会增加。管中的光损失量通过一个光电检测器测量。机械手利用这些光信号收集触摸物体的数据,因为波导在触摸过程中会发生弯曲、变形或改变光信号。可拉伸波导通过软光刻工艺制造,每个波导含有一个LED和光电二极管。
1. 指尖被夹住时,只有底部波导响应;
2. 手指充气和拉直时,中间和顶部波导响应;
3. 手指放气时,中间波导响应。
实验
根据人手的常用功能,研发团队进行了三项测试:形状和纹理检测、柔软度检测以及物体识别。
1.形状和纹理检测
人手感觉一个表面的粗糙度和形状的最常用探索过程就是横向扫描。研发团队利用自己的机器人手臂引导机械手在固定高度对多个表面进行横向扫描,以区分其形状和纹理。他们通过该方法测试了手指映射七种不同3D打印表面的能力。实验结果表明,该机械手能够区分5m-1的弯曲度以及100μm级别的粗糙度。
2.柔软度检测
在本次柔软度检测试验中,机械手测试了以下五种材质和物体的柔软度:丙烯酸塑料、聚氨酯海绵、硅橡胶、成熟番茄、未成熟番茄。致动器的尖端必须直接接触物体顶部,以读取指尖的受力大小和弯曲程度以及不断变化的内部压力,这两部分数据分别由底部波导功率损耗和顶部波导功率损耗表示。
根据内部压力改变手指的刚度也有助于为每种材料生成应力-应变曲线。“底部波导中的损耗与物体的接触力(应力)成正比,而顶部波导中的损耗与其变形(应变)成正比。”研发团队测量了每个物体的四个状态,并且能够将其拟合成线性曲线,从而进行比较。
3.物体识别
物体识别的实验方法如下:研发团队要求机械手从三个番茄中挑出最成熟的一个。在这个演示中,研究人员结合了形状和柔软度测量。首先,他们用横向扫描、形状重建的方法来确定番茄的形状和位置。然后,机械手用食指确定西红柿的输出信号,从而测量其柔软度。最成熟的番茄的顶部波导损耗最大且底部波导损耗最小。就像我们在超级市场一样,该机械手轻轻按压每个西红柿,最终找到最软的一个。
讨论
这种具有丰富感觉的柔软假手是材料科学和机器人技术中以下几个领域结合和延伸的成果:3D打印、软光刻和柔性机器人。这些创新使得机械手实现了极高的精确度和极佳的拉伸性。该团队还强调了假手的易于制造性和化学相容性。此外,机器人领域将受益于可拉伸波导传感器的高再现性。
该原型还有很多方面需要改进。研究人员表示,通过在致动器中集成更多的传感器或者更换致动器本体,可以提高本体感受和外部感受性的感觉密度。如果使用较大功率的LED、大功率激光二极管以及增加软致动器的压力范围(即更大压力),机械手的触觉灵敏度还可以增强。
-
机械手 OEM 的应用2024-09-18 1022
-
如何设计一款基于STM32的仿生机械手2022-01-07 2431
-
PLC控制机械手设计2008-12-13 2974
-
数控上下料机械手的研究及应用2009-04-07 534
-
基于 CAN 总线的机械手控制系统The Control S2009-06-03 633
-
基于PLC的机械手混合驱动控制2011-08-15 1280
-
基于PLC的机械手控制设计(毕业设计)2015-11-13 2644
-
机械手图册——机械手设计必看2018-02-01 2597
-
新型抓胎机械手结构优化及动作分析2018-03-07 1272
-
列车预装配柔性机械手设计2018-03-20 1098
-
机械手内部是什么样的吗?部位结构种类分析2019-07-11 15000
-
拥有人类触觉的柔软机械手2023-02-27 1771
-
坐标机械手配件有哪些?2023-12-07 1980
-
机器视觉控制机械手的具体过程2024-07-04 2277
-
案例分析,搬运机械手如何选择电机?2025-01-21 2356
全部0条评论

快来发表一下你的评论吧 !
