

关于分布式控制系统简化了机器人的3C设计的相关方案设计
描述
一旦主控制器接触来自传感器和中间控制器的智能交流信息,它需要在下一个任务上做决定。举个例子,如果一个独立机器人正在地震后的废墟中寻找被埋起来的幸存者,它的红外线探测仪检测到了热量,控制器需要决定该做什么。它应该进一步调查吗?它应该先检测环境确定结构完整性吗?它需要再靠近一点确定那是否是一个人散发的热量吗?它应该询问人类下一步该怎么做吗?这些问题都需要在下一步指示确定前由处理器处理。
在许多情况下可能需要更多的信息,因为终端节点可能只会发送警报推理背后的数据。如果现在有一个重大的处理过程,超出终端节点的处理范围,中央处理器将需要大量的计算进行“重要提升”。一个功率高效,高性能处理器对使用电池的小型自动机器人来说是一个不错的选择。主控制器也需要连接到广泛的不同终端节点和中间控制器的交流通道。中间控制器需要高速的接口,像以太网和USB。相似的,低速的传感器需要低速接口,像SPI和UART。
新一代高效嵌入式处理器能满足这些新应用所需要的特点。比如,新Intel Quark SoC X10xx 处理器有功率高效的CPU核心和多交流式界面,包括以太网,USB,PCle2.0,SPI,12C和UART。通向片外内存的入口由嵌入式控制器模块支持,以高容量的DDR或低容但更快的SRAM形式。对于高可靠性的应用来说,一个纠错码储存器(ECC)能自动发现并修补内存错误。高级的安全功能提高了对恶意入侵的抵抗能力,一个关于嵌入式系统的担心是日益增长的有组织的黑客数量。Quark X10xx 家族甚至有成员有着安全启动能力,能探测试图篡改启动引导代码的行为,一个对于侵入嵌入式网络最有侵略性和有效的方法。

图2:Intel Quark SoC X1000 原理框图。(来源:Intel)
在分布式机器人系统中的某些时刻,电子信号需要被转换为机械运动。机械运动可能涉及到高速移动一个底盘(并且准确的停在正确的位置)或者操纵一个机器“手”抓住并提起一个小物体。在任何一种情况下发动机都很可能参与翻译电子信号成指定的机械运动的过程。自从MCU的制造加速了他们对发动机控制应用的支持,最近几年大范围的发动机的设计开始变得相似。
MCU用于发动机控制已经好几年了,而且当更高效,更可靠,磨损减少,使用寿命延长的新算法出现,MCU总会开发新功能来跟上这些改变。举个例子,升级的处理能力,包括数字信号处理和浮点,现在能取消主CPU的数据预处理任务。此外,硬件计时器能执行低水平的电流电压整形的任务,用于控制算法,进一步腾出主CPU空间,提高系统效率。
帮助评估和设计发动机控制应用的参考设计进一步简化了开发过程。比如,Freescale Kinetics MCU 家族对不同的应用有多发动机控制参考设计。为了帮助设计者更快的在许多的可能选择中导航,Freescale创造了一个基于网络的解决方案顾问来筛选对不同的目标应用所需要的不同的特点和能力。正如图3顶部展示的一样,在生成一个展示设备的报告之前,Freescale顾问会带领设计师走过一系列关于应用的问题,功能,发动机类型特点,控制算法和传感器类型。在确定选择之前,会生成一份报告展示有关的参考实例和对设计师有特定设计需求的应用注意。
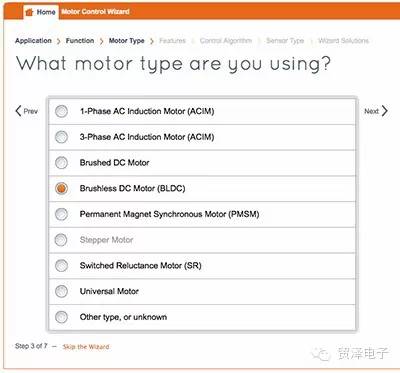
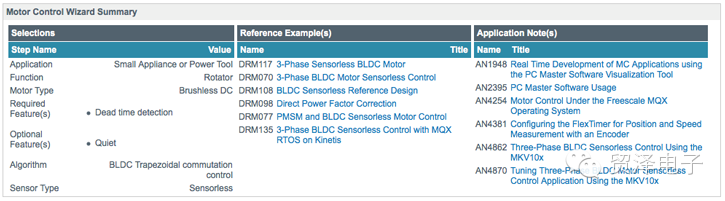
图3A&3B:发动机控制解决方案顾问帮助设计工程师发现适合他们应用的指导设计。(来源:Freescale Semiconductor)
总结
现在你知道了机器人3C原则,你可以把这些元素应用于任何的嵌入式设计,即使它不是一个机器人应用。任务执行时有优化传播,高效和智能命令的分布式传感和电子机器界面的智能控制,对任何复杂的嵌入式设计来说是最好的组织元素。只需确保你的嵌入式系统不违反任何一个阿西莫夫的机器人3C原则。否则真的会成为一个大问题。
-
请问怎样去设计一种车门分布式控制系统?2021-05-14 1291
-
分布式控制系统的组成是什么?2020-03-13 3885
-
嵌入式服务机器人控制系统能实现什么功能?2019-10-15 2531
-
分布式控制系统的介绍2019-07-01 6116
-
如何设计和实现基于UART的机器人分布式控制通信协议概述2018-12-19 1733
-
通用智能机器人分布式控制系统的设计与实现2015-12-25 623
-
基于分布式控制系统的轮式智能机器人研究2012-04-25 875
-
新型的高压变频分布式控制系统2011-08-26 991
-
工业机器人分布式控制系统实例2011-07-13 1507
-
分布式控制系统(DCS)问答2011-06-21 3938
-
基于CAN总线的仿人机器人分布式控制系统2010-12-03 1632
-
分布式控制系统2010-03-01 3324
-
基于虚拟仪器的城市景观照明分布式控制系统设计与实现2009-12-01 6989
-
空间机器人分布式控制系统2009-03-28 1255
全部0条评论

快来发表一下你的评论吧 !
