

关于工业机器人控制系统的组成结构
工业控制
1285人已加入
描述
控制计算机:控制系统的调度指挥机构。一般为微型机、微处理器有32位、64位等,如奔腾系列CPU以及其他类型CPU。
示教盒:示教机器人的工作轨迹和参数设定,以及所有人机交互操作,拥有自己独立的CPU以及存储单元,与主计算机之间以串行通信方式实现信息交互。
操作面板:由各种操作按键、状态指示灯构成,只完成基本功能操作。
硬盘和软盘存储存:储机器人工作程序的外围存储器。数字和模拟量输入输出:各种状态和控制命令的输入或输出。
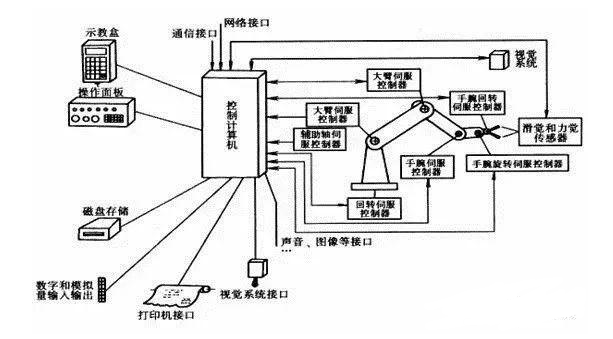
打印机接口:记录需要输出的各种信息。
传感器接口:用于信息的自动检测,实现机器人柔顺控制,一般为力觉、触觉和视觉传感器。
轴控制器:完成机器人各关节位置、速度和加速度控制。
辅助设备控制:用于和机器人配合的辅助设备控制,如手爪变位器等。
通信接口:实现机器人和其他设备的信息交换,一般有串行接口、并行接口等。
网络接口
1)Ethernet接口:可通过以太网实现数台或单台机器人的直接PC通信,数据传输速率高达10Mbit/s,可直接在PC上用windows库函数进行应用程序编程之后,支持TCP/IP通信协议,通过Ethernet接口将数据及程序装入各个机器人控制器中。
2)Fieldbus接口:支持多种流行的现场总线规格,如Device net、AB Remote I/O、Interbus-s、profibus-DP、M-NET等。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
工业机器人控制系统的基本组成有哪些2024-06-16 4925
-
通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现2023-02-24 2613
-
PDF——工业机器人技术及应用2022-10-16 27520
-
什么是机器人控制系统2021-10-11 3666
-
机器人系统与控制需求简介2021-09-08 2358
-
ZNH-IR04工业机器人综合应用实训平台实验2021-07-01 2912
-
机器人控制系统分类_机器人控制系统有哪些2019-11-04 28906
-
工业机器人的技术原理2018-11-23 5101
-
工业机器人控制系统组成及典型结构2016-12-20 33442
-
如何系统性地学习工业机器人技术?2016-03-06 3499
-
工业机器人上用的控制控制系统有哪些厂商呀?2015-01-23 175138
-
工业机器人的基本结构2015-01-19 9570
全部0条评论

快来发表一下你的评论吧 !
